






1.问题描述
在做4.4.2 例子:评估轨迹的误差 过程中,groundtruth.txt 和 estimated.txt 文件以及trajectoryError.cpp在同一目录example下,完成编译后,运行却出现找不到groundtruth.txt 和 estimated.txt 文件的情况,问题显示如下:

2.解决过程
参考了几篇博客,尝试过修改相对地址或绝对地址;尝试过新建build文件下新建example文件,将groundtruth.txt 和 estimated.txt放入,没有解决。
3.解决办法
将trajectoryError.cpp文件中的10、11行修改如下:

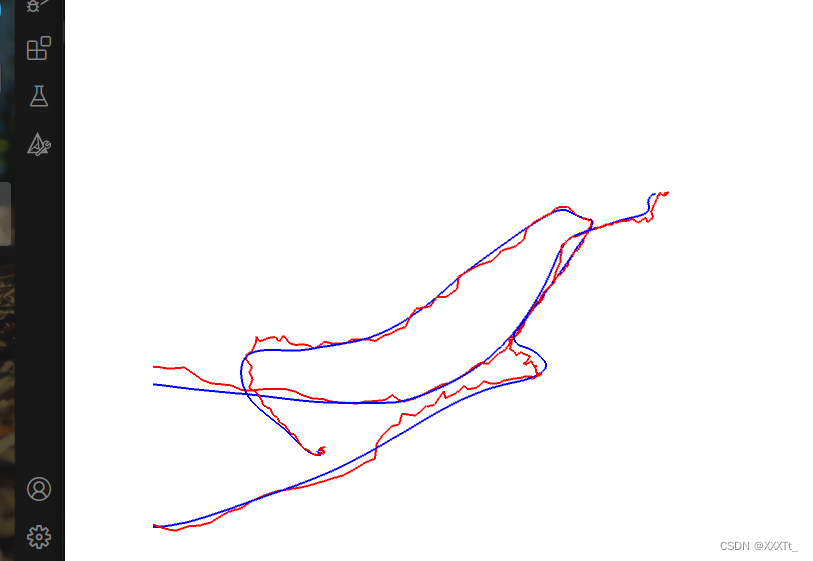
4.修改结果
成功运行















 764
764











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









