







函数作用:将所有期望和目标设置为“测量”,被调用时,都是设置油门到零。
函数全局调用情况如下:共13处出现,其中输入参数都是零
void AC_PosControl::relax_alt_hold_controllers(float throttle_setting)


函数声明情况如下:
函数所属类的声明情况如下:

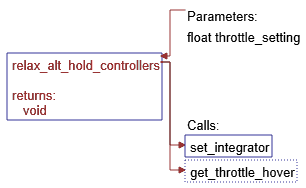
函数流程图如下:

函数逻辑顺序图如下:

函数原始代码如下:
// relax_alt_hold_controllers - set all desired and targets to measured
void AC_PosControl::relax_alt_hold_controllers(float throttle_setting)
{
_pos_target.z = _inav.get_altitude();
_vel_desired.z = 0.0f;
_flags.use_desvel_ff_z = false;
_vel_target.z = _inav.get_velocity_z();
_vel_last.z = _inav.get_velocity_z();
_accel_feedforward.z = 0.0f;
_accel_last_z_cms = 0.0f;
_accel_target.z = -(_ahrs.get_accel_ef_blended().z + GRAVITY_MSS) * 100.0f;
_flags.reset_accel_to_throttle = true;
_pid_accel_z.set_integrator((throttle_setting-_motors.get_throttle_hover())*1000.0f);
}
















 193
193











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











