







 本文探讨了智能驾驶中的高精度定位技术,尤其是RTK与PPP-RTK的差异。RTK提供厘米级定位,而PPP-RTK在保持高精度的同时,具备基站分布灵活、不受单一基站影响、保持精度持久的优势,尤其适用于高级别自动驾驶,其完好性和功能安全特性满足L3及以上自动驾驶需求。
本文探讨了智能驾驶中的高精度定位技术,尤其是RTK与PPP-RTK的差异。RTK提供厘米级定位,而PPP-RTK在保持高精度的同时,具备基站分布灵活、不受单一基站影响、保持精度持久的优势,尤其适用于高级别自动驾驶,其完好性和功能安全特性满足L3及以上自动驾驶需求。
引言:提到智能驾驶,就离不开它必要功能需求——高精度定位,其中实时动态定位RTK(Real-Time Kinematic)是高精度卫星导航定位中应用最为广泛、最具代表性的技术,身为北斗国家队的千寻位置,基于RTK技术承建和运营了地基增强系统“全国一张网”,颇受广大海内外用户好评。然而近来,PPP-RTK的概念甚嚣尘上,听说其表现颇为亮眼,业内人士免不了要将RTK与PPP-RTK进行一番比较,既已有了便宜大碗的RTK,为何还要打造出一个PPP-RTK?想解开这个既生瑜何生亮的问题,让我们从GNSS高精定位发展史讲起…
GNSS高精度定位最早用于军事用途,后来逐渐开放民用,最早主要用于导航,精度较低,从几米到几十米不等,主要是采用“标准单点定位”技术,专业术语SPP(Single Point Positioning)。这样的定位误差太大显然满足不了测绘和航空等领域的应用,那么是什么因素导致了定位误差这么大呢?经过一波波科学家的不断研究,发现影响高精度定位的因素主要分为三类:卫星相关误差,信号传播路径相关误差,卫星信号接收器相关误差,见下图。
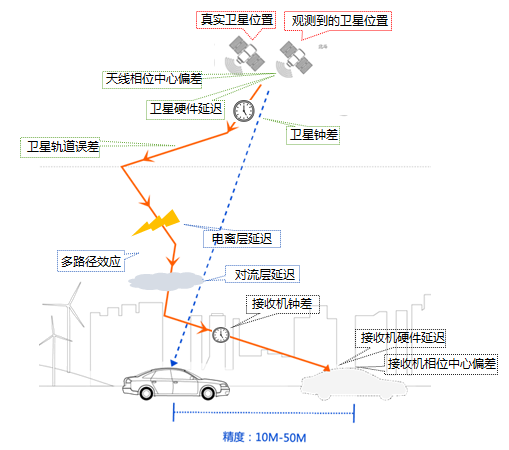
卫星相关的误差对于全球用户的影响都一样,卫星信号传播路径相关误差影响特定区域,卫星信号接收器相关误差只影响此接收器。那么如何消除或减弱
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









