






 本文详细介绍了一种利用SVPWM矢量控制、双闭环PID控制以及高级控制技术如高阶滑膜、龙伯格观测无感和ADRC的三相永磁同步电机MATLAB仿真算法,强调其在稳定性和精度方面的优势。
本文详细介绍了一种利用SVPWM矢量控制、双闭环PID控制以及高级控制技术如高阶滑膜、龙伯格观测无感和ADRC的三相永磁同步电机MATLAB仿真算法,强调其在稳定性和精度方面的优势。
三相永磁同步电机(PMSM) SVPWM矢量控制 MATLA 仿真算法:
(1)采用SVPWM矢量控制;
(2)采用转速、电流双闭环控制;
(3)转速环采用PI控制;
(4)电流环采用PI控制;
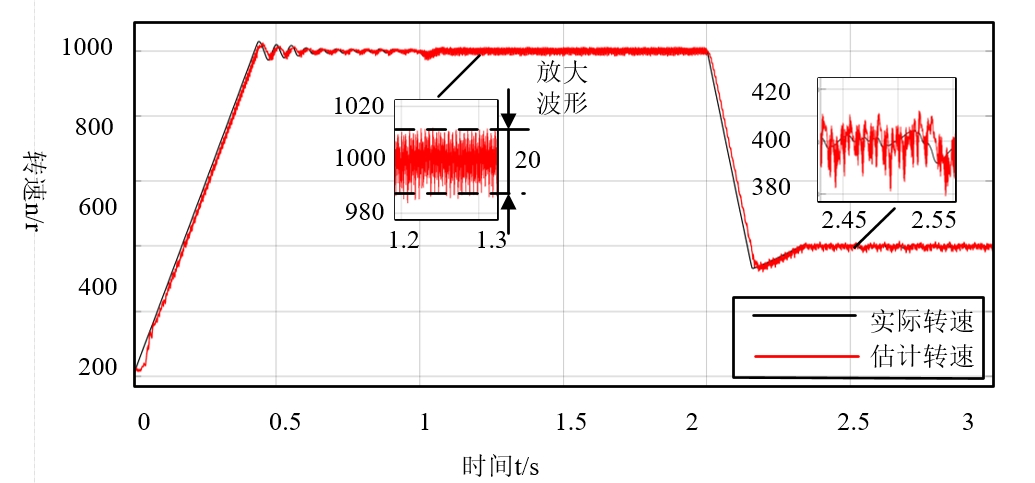
(5)跟踪性能良好,当转矩发生变化时能够快速稳定转速;
(6)各个模块功能分类明确,容易理解。
另有高阶滑膜、龙伯格观测无感,adrc控制
ID:7650644496243121
宇立龙腾
标题:基于SVPWM矢量控制的三相永磁同步电机MATLAB仿真算法
摘要:本文介绍了一种基于SVPWM矢量控制的三相永磁同步电机(PMSM)MATLAB仿真算法。该算法采用转速和电流双闭环控制,通过PI控制实现转速环和电流环的精确控制。同时,文章还介绍了高阶滑膜、龙伯格观测无感和ADRC控制等技术,以提高电机的跟踪性能和稳定性。
第一部分:引言
三相永磁同步电机(PMSM)作为一种高效、高性能的电机,广泛应用于工业自动化领域。为了实现对PMSM的精确控制,SVPWM矢量控制成为目前应用最为广泛的控制策略之一。本文将介绍基于SVPWM矢量控制的PMSM MATLAB仿真算法,并通过转速和电流双闭环控制,实现对PMSM的稳定控制。
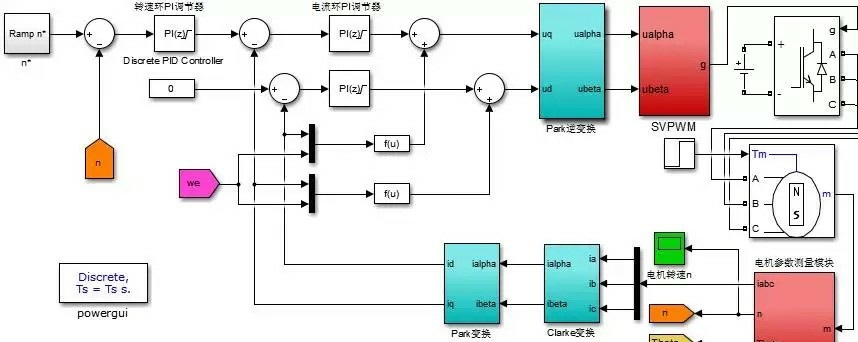
第二部分:SVPWM矢量控制
SVPWM矢量控制是一种通过控制电压矢量实现对三相电机的控制策略。它通过计算合适的电压矢量,使得电机的转速和转矩能够实现精确控制。本文中使用的MATLAB仿真算法基于SVPWM矢量控制,并通过改变电压矢量的大小和方向,实现对PMSM的精确控制。
第三部分:转速和电流双闭环控制
为了提高PMSM的控制精度,本文采用了转速和电流双闭环控制策略。其中转速环采用PI控制算法,通过实时测量转速反馈信号,调整电机的转速。电流环也采用PI控制算法,通过实时测量电流反馈信号,调整电机的电流输出。通过转速和电流双闭环控制,可以有效提高PMSM的控制精度和稳定性。
第四部分:高阶滑膜、龙伯格观测无感和ADRC控制
除了SVPWM矢量控制和转速、电流双闭环控制,本文还介绍了高阶滑膜、龙伯格观测无感和ADRC控制等技术。高阶滑膜技术可以提高PMSM的鲁棒性和抗干扰能力,使其在负载变化和参数不确定性的情况下仍能稳定工作。龙伯格观测无感技术可以实现对电机位置和速度的无感测量,从而简化系统结构和提高系统的可靠性。ADRC控制技术结合了滑模控制和自适应控制的优势,能够通过自调整参数实现对PMSM的精确控制。
第五部分:实验结果与讨论
本文基于MATLAB仿真平台进行了PMSM的仿真实验,并对实验结果进行了分析和讨论。实验结果表明,基于SVPWM矢量控制的PMSM算法在跟踪性能和稳定性方面具有良好的表现。同时,通过引入高阶滑膜、龙伯格观测无感和ADRC控制等技术,进一步提高了PMSM的控制精度和鲁棒性。
第六部分:结论
本文介绍了一种基于SVPWM矢量控制的三相永磁同步电机(PMSM)MATLAB仿真算法。该算法通过转速和电流双闭环控制,实现了对PMSM的精确控制。同时,引入了高阶滑膜、龙伯格观测无感和ADRC控制等技术,进一步提高了PMSM的控制精度和鲁棒性。本文的研究结果对于PMSM的控制策略优化和工程应用具有一定的参考价值。
关键词:三相永磁同步电机;SVPWM矢量控制;转速闭环控制;电流闭环控制;高阶滑膜;龙伯格观测无感;ADRC控制;MATLAB仿真算法。
以上相关代码,程序地址:http://matup.cn/644496243121.html















 621
621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









