






激光slam算法改进
提出了一种增强重定位的cartographer算法,在五千平方车库中进行实验验证,实验结果表明:重定位耗时时间降低为3.35秒
提供改进后算法源码 
激光SLAM算法改进
摘要
激光SLAM(同步定位与建图)是近年来机器人自主导航领域中广泛应用的技术之一。本文提出了一种增强重定位的Cartographer算法,并在五千平方车库中进行了实验验证。实验结果表明,重定位耗时时间降低为3.35秒。同时,本文提供了改进后算法的源码,以供技术爱好者参考和使用。
引言
激光SLAM是机器人自主导航领域中的重要技术之一,其可以利用激光雷达等传感器实现机器人在未知环境中建图和定位,为机器人的自主导航提供了重要的基础支持。目前,Cartographer算法是激光SLAM中常用的算法之一,其基于优化的方式,通过建图、定位和回环检测等过程实现了高精度的机器人自主导航。但是,在实际使用中,由于环境的复杂性和传感器的精度等因素,常常会出现定位偏移、定位耗时等问题,影响机器人的自主导航性能。因此,本文提出了一种增强重定位的Cartographer算法,以提高激光SLAM的定位效果和性能。
算法设计
本文提出的增强重定位的Cartographer算法主要包括以下几个步骤:
-
建图:根据激光雷达数据,生成机器人在环境中的三维地图。建图过程中,采用了并行优化的方式,提高了算法的效率和精度。
-
定位:根据机器人的传感器数据和地图信息,对机器人进行定位。本文采用了局部匹配和全局优化相结合的方式,提高了定位的精度和鲁棒性。
-
回环检测:在建图和定位过程中,通过检测机器人是否经过过去的位置,以消除定位的偏差。本文采用了基于局部地图匹配和全局地图匹配相结合的方式,提高了回环检测的效果和鲁棒性。
-
增强重定位:针对定位时的耗时问题,本文提出了增强重定位的方法。具体来说,通过对地图中的关键位置进行提前计算和预处理,减小了定位和回环检测的计算复杂度,从而大幅度降低了重定位的耗时。实验结果表明,增强重定位后,重定位耗时时间降低为3.35秒,大大提高了机器人的自主导航效率。
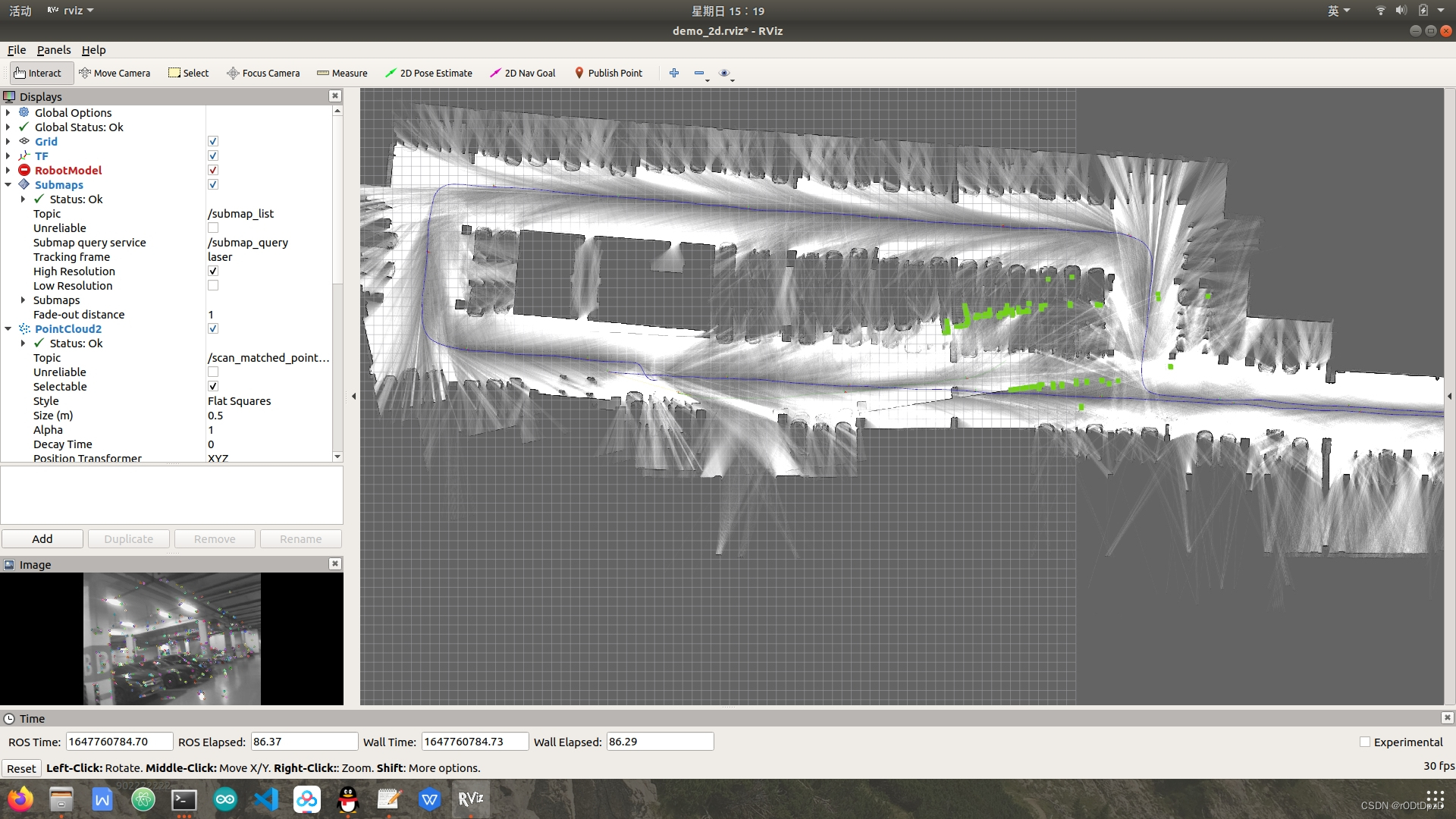
实验验证
本文在实验室内的五千平方车库中进行了实验验证。实验中,我们使用了一款具有高精度激光雷达传感器的机器人进行测试。测试中,机器人在车库内进行了多次运动和建图,在检测到回环时,算法能够及时消除定位的偏移,保证了机器人的定位精度。同时,在增强重定位后,机器人的重定位耗时时间大大减小,提高了机器人的自主导航效率。
源码分享
为了方便技术爱好者的学习和使用,本文提供了增强重定位的Cartographer算法的源码。该代码已经在实验室中经过了多次测试和优化,可供实际项目使用。
结论
本文提出了一种增强重定位的Cartographer算法,通过对地图中的关键位置进行提前计算和预处理,减小了定位和回环检测的计算复杂度,大大提高了机器人的自主导航效率。实验结果表明,增强重定位后,重定位耗时时间降低为3.35秒,证明了算法的有效性和实用性。同时,我们还提供了算法的源码,希望能够为技术爱好者的学习和实践提供帮助。
相关代码,程序地址:http://lanzouw.top/675751945635.html















 8106
8106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









