







 本文介绍了ROS中用于小车建图的Gmapping和Cartographer算法。Gmapping依赖粒子滤波,适用于小场景,需要深度、IMU和里程计信息。Cartographer适用于大场地,自带回环检测,仅需雷达数据。Gmapping通过tf和scan话题获取信息,发布实时地图,而Cartographer分为local和global扫描阶段进行回环检测以减少误差。
本文介绍了ROS中用于小车建图的Gmapping和Cartographer算法。Gmapping依赖粒子滤波,适用于小场景,需要深度、IMU和里程计信息。Cartographer适用于大场地,自带回环检测,仅需雷达数据。Gmapping通过tf和scan话题获取信息,发布实时地图,而Cartographer分为local和global扫描阶段进行回环检测以减少误差。
ROS提供了现成的各类建图算法实现。如果只是应用的话不需要了解详细算法原理,只需要了解其需要的输入输出即可。
1 Gmapping
Gmapping使用粒子滤波算法进行建图,在小场景下准确度高,但是在大场地中会导致较大计算量和内存需求
Gmapping需要机器人提供深度信息,IMU信息,和里程计信息这三个中至少两个。利用这些输入信息gmapping算法可以输出栅格地图即小车在地图中定位
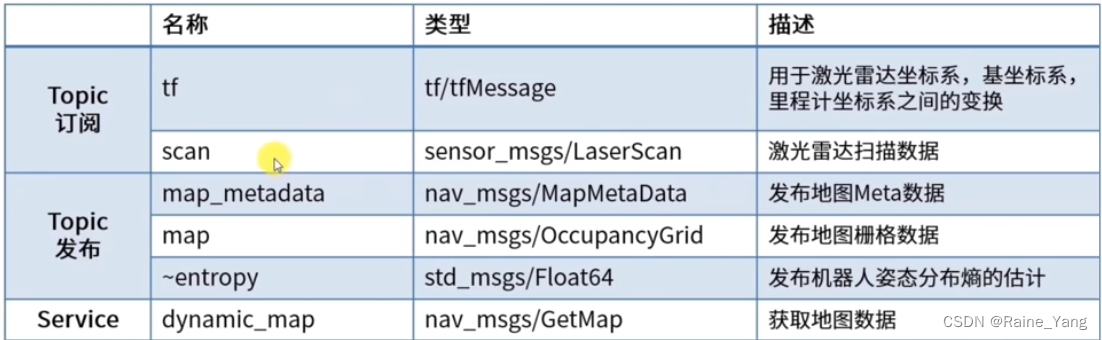
Gmapping订阅话题tf和scan。tf话题包含激光雷达和机器人基坐标系位置关系,scan包含激光雷达信息和IMU加速度信息。Gmapping可以通过话题和服务两种方式发布地图信息。其中map话题发布实时地图栅格数据,而服务dynamic_map只有在客户端发布请求是才会发布最新地图,相对于话题可以节省通信开支
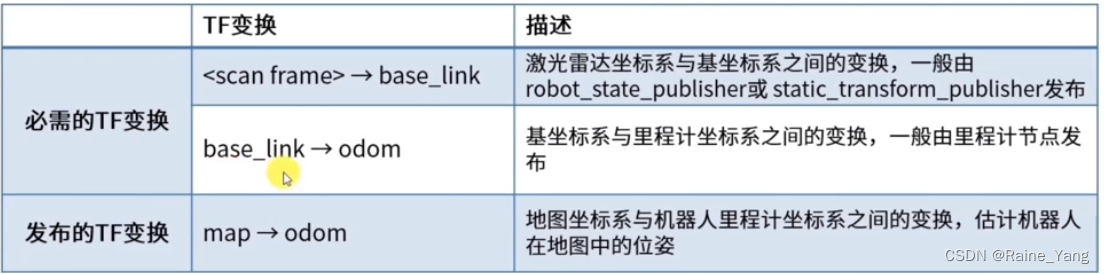
对于odom里程计信息,Gmapping不用话题获取,而是通过TF树进行维护。其中 -> base_link为激光雷达相对base_link(默认的机器人基坐标系)位置,这一值一般为静态,在小车模型文件中定义好。
base_link ->odom为机器人位置相对于里程计原点坐标。其中odom坐标系位置为小车开始运行时里程计位置。通过速度积分得到base_link和odom的距离即可得到小车里程信息
map->odom 为地图中机器人位置关于里程计坐标。这里map和odom都为1不同的参考坐标系,odom是里程计测得的位置坐标,依靠小车自身移动速度积分得到,map为激光雷达测得的小车在地图上位置坐标。两者坐标系差距即为里程计的偏移
小车源码:
1 mapping.launch 启动建图的launch文件(只保留和gmapping相关内容)
<launch>
<arg name="mapping_mode" default="gmapping" doc="opt: gmapping,hector,cartographer,karto"/>
<!-- turn on lidar开启雷达 -->
<include file="$(find turn_on_wheeltec_robot)/launch/wheeltec_lidar.launch" />
<!-- 开启gmapping建图算法 -->
<group if="$(eval mapping_mode == 'gmapping')">
<include file="$(find turn_on_wheeltec_robot)/launch/include/algorithm_gmapping.launch" />
<!-- 开启机器人底层相关节点 -->
<include file="$(find turn_on_wheeltec_robot)/launch/turn_on_wheeltec_robot.launch">
<arg name= 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2879
2879

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









