






使用gmapping 和 hector_slam功能包实现SLAM仿真,并将简历完成的地图保存到功能包的maps文件夹中,以及基于move_base和amcl功能包的机器人自主导航仿真
注意:要先导入相应的ros包,launch文件才能进行后面的操作




1. 使用gmapping仿真并并将简历完成的地图保存到功能包的maps文件夹中
先下载gmapping包

打开gazebo模型

如图:
 打开rviz,模拟
打开rviz,模拟

如图:

执行以下代码进行机器人的移动:

在这个终端上面,按键盘上的uiojklm,.键来控制机器人的移动

如下图:开始移动,扫描

最终移动一圈之后,形成的图形

为了把这个地图保存下来,于是要先安装一个map-server这个包
 然后输入下面的指令,进行保存
然后输入下面的指令,进行保存
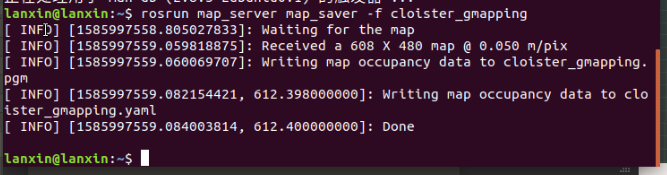
如下面的红框内的两个pgm和yaml文件

打开可以查看pgm,即保存的地图

可以打开yaml文件查看地图的参数

2. hector_slam功能包实现SLAM仿真,并将简历完成的地图保存到功能包的maps文件夹中
下载hector_slam功能包

打开gazebo

打开rviz

开始机器人的移动控制

如下图,移动一圈之后,最后的结果:

保存为hector_gmapping

可以看见下面红框内即为保存的

依然可以打开查看地图及参数:


基于move_base和amcl功能包的机器人自主导航仿真
先要安装move_base包

打开gazebo

打开rviz,查看地图

可以通过2D new goal让机器人移动

进行自主导航
第一步:

第二步:

 第三步:
第三步:
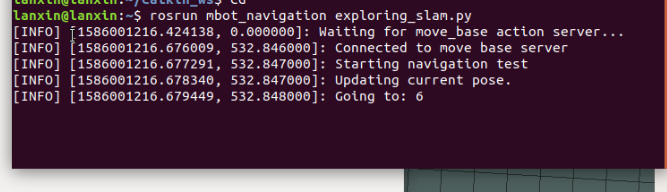
如下图,机器人就会自己导航进行探索,绘制地图

由于我的机器人运动缓慢,等了很久还没有绕一圈,所以没有等下去了,地图概况大概如下:
















 7900
7900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









