







目录
6轴机器人工作空间
图1-1表示RM65-B运动范围,除去基座正上方和正下方的圆柱空间,工作范围为半径610mm的球体。选择机器人安装位置时,务必考虑机器人正上方和正下方的圆柱体空间,尽可能避免将工具移向圆柱体空间。另外,在实际应用中,关节1转动范围:±178°,关节2转动范围:±130°,关节3转动范围:±135°,关节4转动范围:±178°,关节5转动范围:±128°,关节6转动范围:±360°。

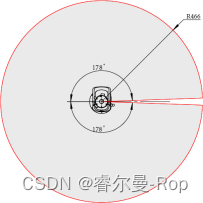
图1-1 机器人可达空间示意图
从工作空间截面上看,6轴机器人可操作度较好的区域如下图1-2黄色框线示意,在工作空间中整体呈现一个环状区域。

图1-2 可操作度较好的区域示意图
6轴机器人奇异区域
1. 肩部奇异
腕部中心点C(关节5、6轴线交点)与1轴共线,示意点位(关节角)[0, 43.4 -105.7,0,-30,0],如图2-1所示:
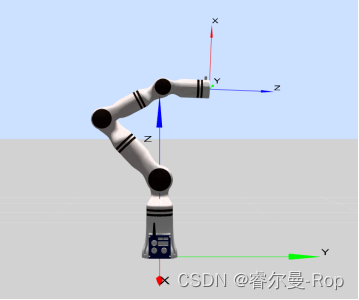
图2-1 肩部奇异
关节1、6共轴,C与1轴共线的特殊情况,示意点位(关节角)[0, 43.4 -105.7,0,62.3,0],如图2-2所示:
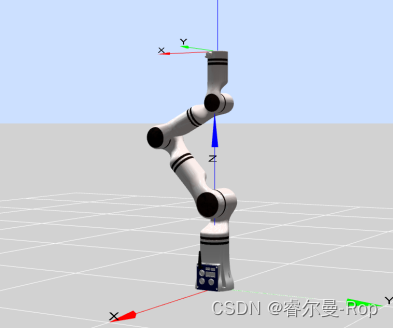
图2-2 肩部奇异
2. 肘部奇异
关节3角度等于0,即点位格式为[x,x,0,x,x,x],示意点位[-90,60,0,0,90,0],如图2-3所示:
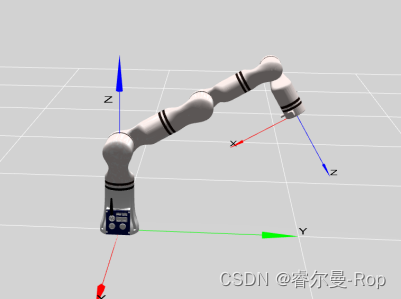
图2-3 肘部奇异
关节1、4共轴,关节3角度等于0的特殊情况,即点位格式为[x,0,0,x,x,x],示意点位[0,0,0,90,-60,0],如图2-4所示:
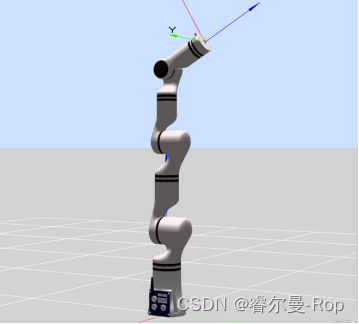
图2-4 肘部奇异
关节1、4、6共轴,关节3角度等于0的特殊情况,即点位格式为[x,0,0,x,0,x],示意点位[0,0,0,90,0,0],如图2-5所示:
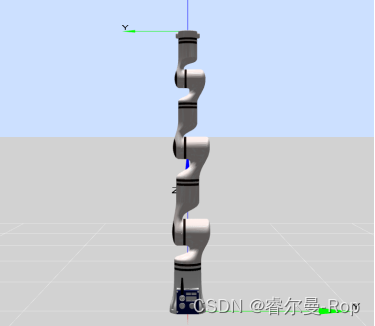
图2-5 肘部奇异
3. 腕部奇异
关节4、6共轴,关节5角度等于0,即点位格式为[x,x,x,x,0,x],示意点位[0,60,30,0,0,0],如图2-6所示:
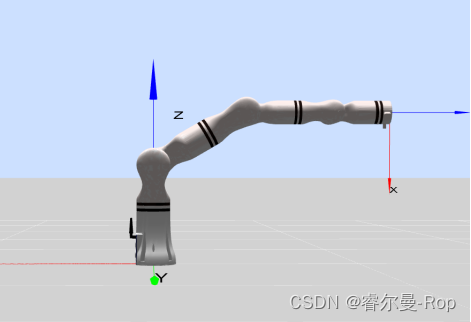
图2-6 腕部奇异
4. 边界奇异
机械臂末端到达最远端,关节3角度等于0的特殊情况,即点位格式为[x,x,0,x,0,x]。示意点位[0,0,0,0,0,0]、[-90,90,0,0,0,0]、[-90,45,0,0,0,0]如图2-7、图2-8、图2-9所示:
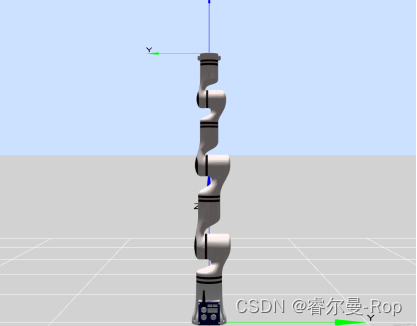
图2-7 边界奇异

图2-8 边界奇异

图2-9 边界奇异















 2887
2887











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









