







 该文详细介绍了如何通过有线和无线方式连接机械臂,包括网线连接、RS485转串口通信和USB串口通信的步骤,以及WIFISTA和WIFIAP模式的设置方法,涉及到IP配置和通信协议的使用。
该文详细介绍了如何通过有线和无线方式连接机械臂,包括网线连接、RS485转串口通信和USB串口通信的步骤,以及WIFISTA和WIFIAP模式的设置方法,涉及到IP配置和通信协议的使用。
目录
有线连接
网线连接
①机械臂开机,使用网线将机械臂网口2与电脑网口相连。
②打开电脑设置界面,打开网络与Internet(需设置电脑与机械臂处于同一网段)。
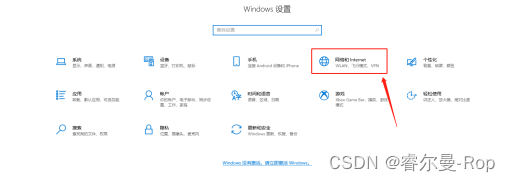
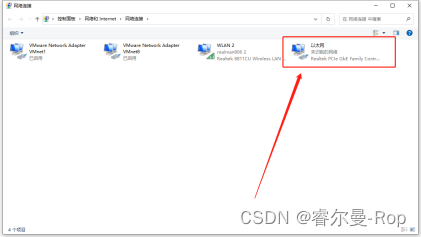
③进入电脑设置界面,左侧菜单栏选择-->以太网-->更改适配器设置

④双击以太网进入,进入以太网设置界面。
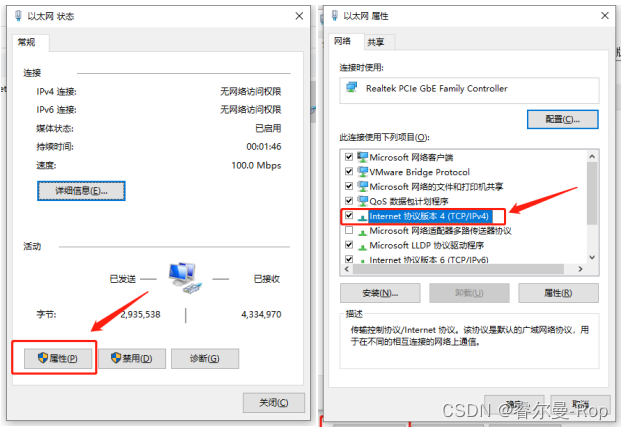
⑤点击“属性”进入以太网属性界面,在此处双击“Internet协议版本4(TCP/IP)”。
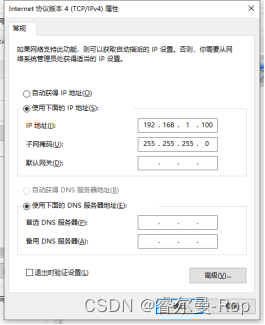
⑥进入协议版本之后,设置电脑本地以太网IP,机械臂的默认IP为192.168.1.18,电脑的IP设置为192.168.1.100,其他参数设置如下图所示。设置完成之后点击确定按钮进行保存。
至此,电脑端的IP设置到此结束。
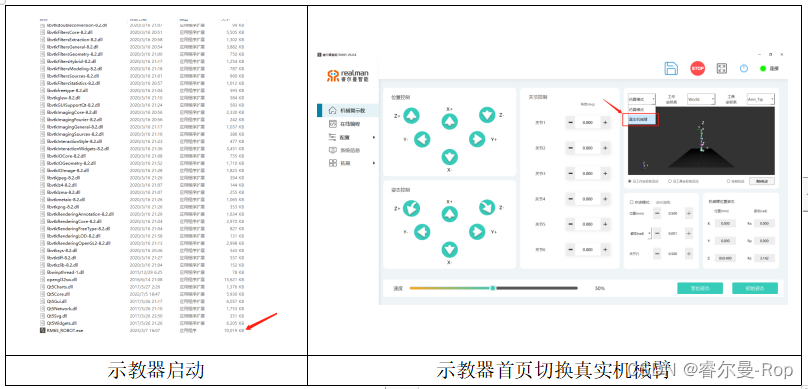
⑦示教器连接,使用网线连接PC端与机械臂网口1。双击打开示教器,此时会自动连接。进入示教器首页,切换真实机械臂,可控制机械臂运动,说明连接成功。
RS485转串口通信与USB串口通信
RS485转串口通信与USB串口通信两种通信方式在软件操作上无区别,均通过串口调试助手进行通信测试,硬件接线会有较大差别,本文对2者接线进行详细介绍,软件操作做通用说明,通信协议使用JSON协议。
RS485转串口通信接线说明:
硬件:26芯电缆线一条、RS485转串口模块1个;
软件:串口调试助手;
接线步骤:
①将26芯剥开,找到RS485L、RS485H两根线,根据设备资料显示26芯线线序说明如下:
| 序号 | 颜色 | 定义 | 说明 | 备注 |
| 1 | 蓝条棕、紫 | 5V+ | 5v输出 | |
| 2 | 黄棕、绿棕 | GND | 输出地 | |
| 3 | 红棕 | 12V+ | 12v输出 | |
| 4 | 紫棕 | CAN_H | CAN | 选配功能 |
| 5 | 蓝黑 | CAN_L | CAN | 选配功能 |
| 6 | 黄黑 | 485_L | 485 | |
| 7 | 绿黑 | DOUT1 | 数字输出通道 | 0~24v |
| 8 | 红黑 | DOUT2 | ||
| 9 | 紫黑 | DOUT3 | ||
| 10 | 黄绿 | DOUT4 | ||
| 11 | 黄白 | AIN1 | 模拟输入通道 | 0~10v |
| 12 | 绿白 | AIN4 | ||
| 13 | 红白 | AIN3 | ||
| 14 | 紫白 | AIN2 | ||
| 15 | 黄 | AOUT2 | 模拟输出通道 | 0~10v |
| 16 | 棕 | AGND | 模拟地 | |
| 17 | 灰 | DIN1 | 数字输入通道 | 0~24v |
| 18 | 粉 | 485_H | 485 | |
| 19 | 浅蓝 | DIN2 | 数字输入通道 | 0~24v |
| 20 | 蓝白 | OUT_PWR_DIN+ | 外部输入数字电源 | 0~24v |
| 21 | 绿 | DIN3 | 数字输入通道 | 0~24v |
| 22 | 蓝 | AOUT1 | 模拟输出通道 | 0~10v |
| 23 | 橙 | AOUT3 | ||
| 24 | 白 | AOUT4 | ||
| 25 | 红 | OUT_PWR_DOUT+ | 外部输出数字电源 | 0~24v |
| 26 | 黑 | DGND | 外部数字地 |
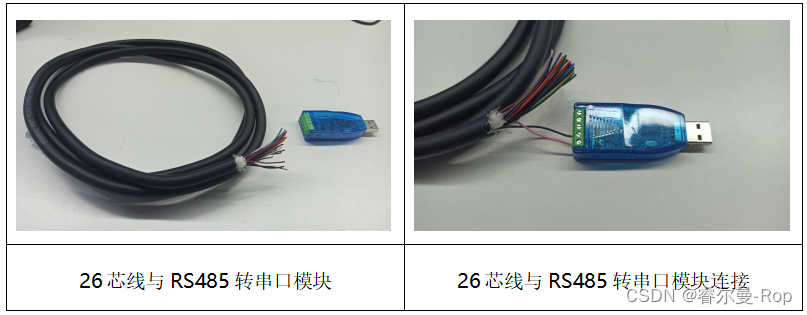
其中,RS485L为黄黑线、RS485H为粉色线。分别对应485转串口模块的RS485B、RS485A。并按下图所示进行接线。
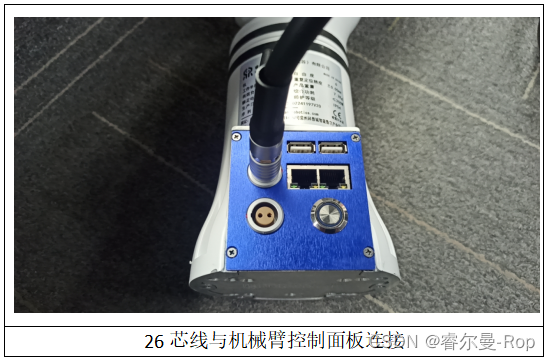
②26芯线与机械臂接线说明
在机械臂断电前提下,将26芯线接在机械臂控制面板接口的扩展接口,注意对应防反插接头的红点标记。如下图所示:
③RS485转串口模块连接PC端USB口。
USB串口接线说明
硬件:双头USB_A数据线一条;
软件:串口调试助手;
操作说明:
双头USB_A线分别连接机械臂USB口与PC端USB口即可。数据线接机械臂控制面板的USB口2。如下图所示:

串口通信操作说明:
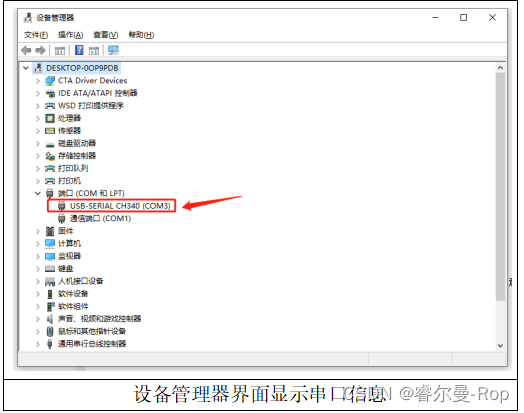
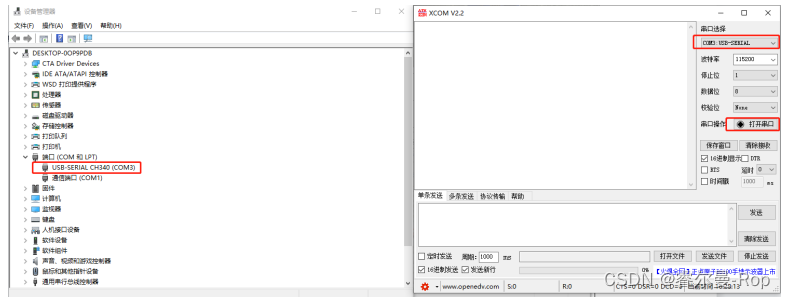
①确保RS485转串口模块或USB线已连接,如使用RS485转串口模块还需注意,PC端设备管理器有无显示未安装驱动,如驱动已安装,则设备管理器会显示如下:
②打开设备任意串口调试助手,并连接指定串口。
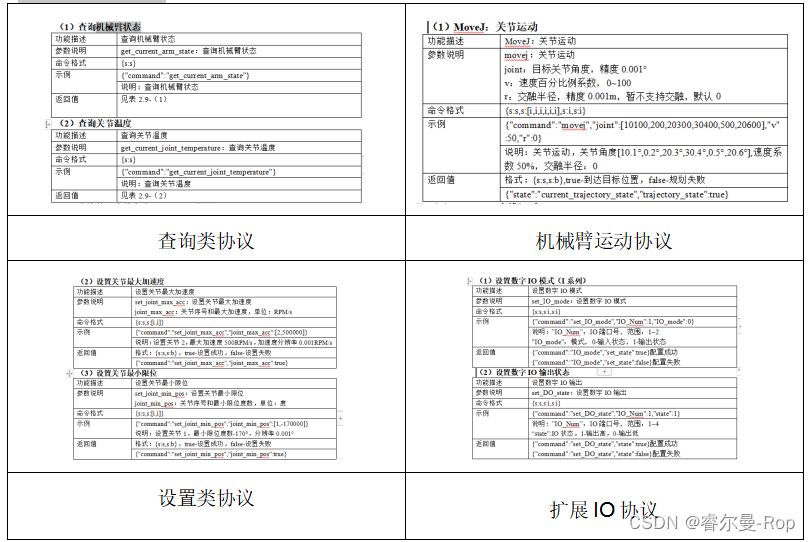
③打开JSON协议说明文档,一般会在资料U盘中,没有也可向厂家索取。我在这里用的是《睿尔曼6自由度机械臂JSON通信协议V3.5.0》。

④此协议文档中规定了读取、设置、运动、扩展IO等的协议内容,对返回值也进行了说明。用法比较简单。
⑤打开串口调试助手,在文本框输入机械臂状态查询命令:“{"command":"get_controller_state"}”,串口助手中波特率设置为460800(机械臂默认波特率为460800,可改)。
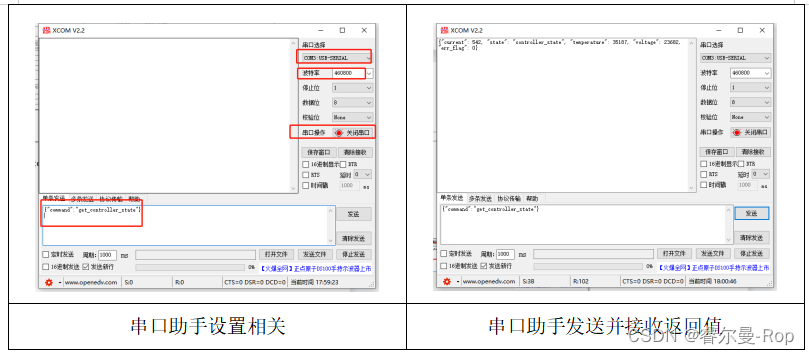
注意:在此处输入协议内容后,需进行换行才可发送。
无线连接
WIFI STA模式连接
WIFI STA通信方式为机械臂连接外部局域网,PC端连接在同一局域网下。通过无线局域网进行通信,此通信方式通信距离有限。
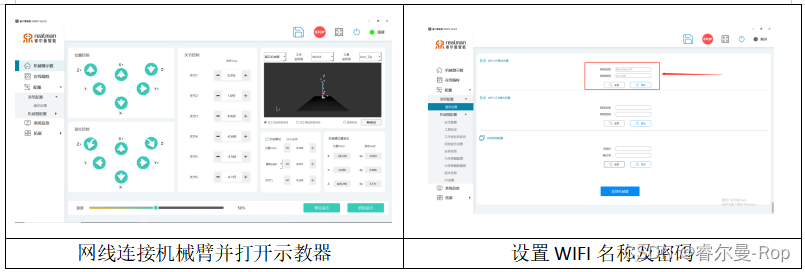
①设置WIFI STA通信方式,首先需要使用网线连接机械臂并打开示教器,进入通讯设置界面,设置wifi名称及密码,设置完毕之后重启机械臂此项设置生效。

②机械臂设置完成,需连接PC端至机械臂所连接的路由器。PC端需与机械臂在同一局域网下。
③重启机械臂之后,通过PC端打开所连接路由器的后台界面查看并分配PC端和机械臂的IP。这里我用的是小米路由器,登录后台就不说了。通过下图可以看到已连接路由器有1个设备,单击进入查看详情。

④通过查看连接详情,可以看到有本机与另外1台设备(此处机械臂在路由器中显示的名称可以在路由器设置界面进行修改,路由器品牌不同,修改的方式也有所不同,这里就不做介绍了),可以看到机械臂在局域网中的IP为192.168.31.240。

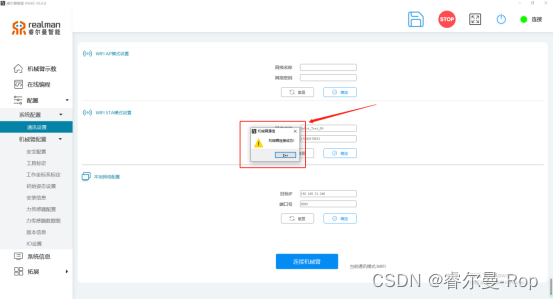
⑤打开机械臂配套的示教器,双击打开会提示连接失败(此处属于正常现象),进入示教器打开通讯管理界面,因为此时机械臂已连接至路由器,所以此时需在本地网络设置区域填写在路由器中获取到的机械臂IP,我这里为192.168.31.240,端口号是固定的:8080。填写完毕,需要单击文本框下方的蓝色确定按钮,保证设置IP和端口号生效。
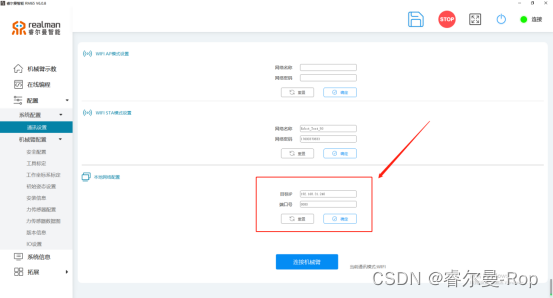
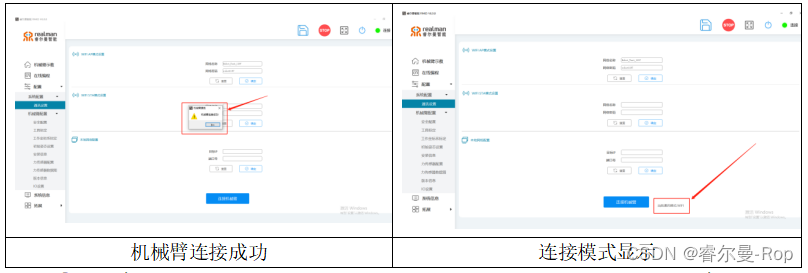
⑥填写完毕IP与端口号,即可点击页面最下方的蓝色“连接机械臂”按钮。此时即可连接成功。蓝色按钮右侧会有“当前通讯模式:WIFi”的提示。
⑦机械臂使用测试,切换界面至示教器首页,在界面右上角切换至真实机械臂,即可控制机械臂进行位置、姿态、关节运动。

WIFI AP模式
WIFI AP通信方式为机械臂创建1个局域网,PC端连接在机械臂创建的局域网下。通过无线局域网进行通信,此通信方式通信距离有限。
①设置WIFI AP的通信方式,首先需要使用网线连接机械臂并打开示教器,进入通讯设置界面,设置wifi名称及密码。设置完毕后,重启机械臂此设置生效。
②机械臂设置完成,需将PC端连接至机械臂创建的局域网。
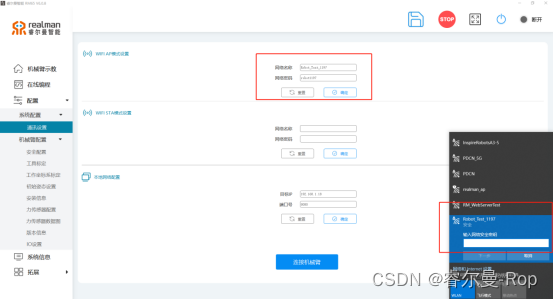
③PC端连接机械臂局域网,PC端的IP由机械臂自行分配,IP为:192.168.1.XX;机械臂IP为:192.168.1.18。打开示教器可直接与机械臂连接,不用进行设置。
④机械臂使用测试,切换界面至示教器首页,在界面右上角切换至真实机械臂,即可控制机械臂进行位置、姿态、关节运动。


















 1899
1899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









