







 文章详细介绍了睿尔曼双臂升降复合机器人平台,包括其自主研发的算法、硬件配置、以及用于教育培训的方块堆叠例程,重点讲解了启动方式、行为树逻辑和使用流程。
文章详细介绍了睿尔曼双臂升降复合机器人平台,包括其自主研发的算法、硬件配置、以及用于教育培训的方块堆叠例程,重点讲解了启动方式、行为树逻辑和使用流程。
睿尔曼双臂升降复合机器人平台,旨在为机器人教育提供强大的实训平台,该平台全自主研发,实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供开放式的软件框架,为教学和科研提供平台支撑。
平台集成了移动底盘、深度视觉、语音模块、超轻量仿人机械臂、五指灵巧手、两指夹爪等各种仿人功能设备。同时在移动底盘上安装了超声波、激光雷达、视觉传感器,使该平台变得更加安全、智能。该教育平台主要应用于教育教学,因此需要提供尽可能多的学习资源、方便的使用软件、开放式的二次开发接口。
睿尔曼双臂升降复合机器人平台中内置了一个方块堆叠例程,主要内容位于“ws_ross_dual”和“catkin_ws”这两个文件夹中。本文将为您介绍这一例程的使用方法。
1.启动设置
若想要开机即运行本例程,请在系统应用程序的“启动应用程序首选项”中添加本例程的启动脚本:dual_robot.sh 。如图1所示:
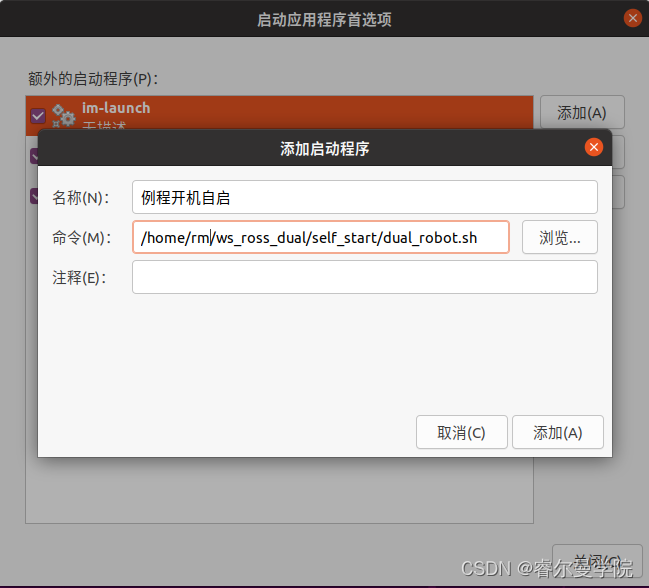
图 1 添加例程开机自启
若不采用开机自启,而是手动输入命令运行,以下提供两个方案:
方案一:运行一键启动脚本:
打印aruco码:(可从以下网址下载)
https://chev.me/arucogen/
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









