 基于稀疏动捕标记点的Mosh三维人体重建算法
基于稀疏动捕标记点的Mosh三维人体重建算法








本文基于[1]对基于动捕标记点的三维人体重建算法Mosh进行一个介绍。
一.简介
所谓动捕标记点,也就是光学标记点,在相机拍摄下具有明显的反光特性,易于从图像中获取其位置,进而通过深度恢复的方法获取其三维坐标。此外,笔者之前已发过的很多基于参数化人体的重建文章,均归类为三维人体重建,其实更细分点,归类为三维人体体型+动作捕捉更合适。
二.具体步骤
1.基本定义
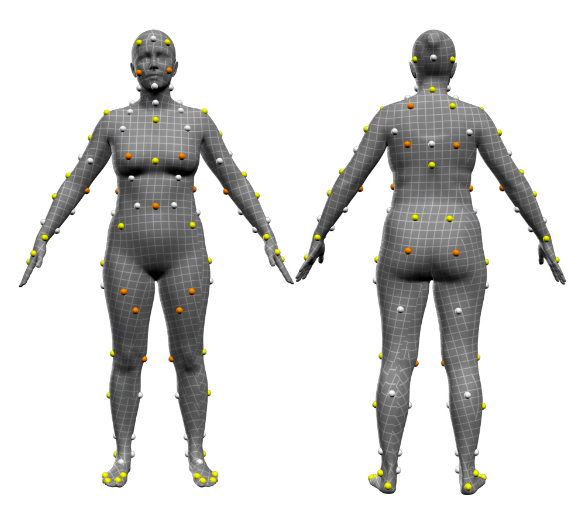
图1.所采用的标记点
包含标准的47个黄色表示的Vicon标记点,外加20个橙色标记点,共67个标记点(注:白色点是论文中证明冗余的标记点)
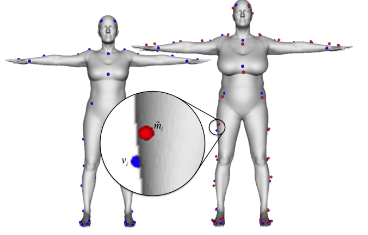
图2.默认标记点、潜在标记点和模拟标记点示意
-
参数化人体 S(β,θ,γ)S(\beta,\theta,\gamma)S(β,θ,γ)
β\betaβ,θ\thetaθ,γ\gammaγ分别指的是形状参数,姿态参数,全局平移参数。 -
默认标记点(default position of the markers) viv_ivi
vi(β)=Sh(i)(β,θ0,γ0)+diNh(i)(β,θ0,γ0)v_ {i} ( \beta )= S_ {h(i)} ( \beta , \theta _ {0} , \gamma_0)+ d_ {i} N_ {h(i)} ( \beta , \theta _ {0}, \gamma _ {0} )vi(β)=Sh(i)(β,θ0,γ0)+diNh(i)(β,θ0,γ0)
其中,θ0\theta _ {0}θ0 , γ0\gamma_0γ0 表示中性姿态,h(i)h(i)h(i)表示标记点i所对应的在人体模板上的索引,did_ {i}di为标记点中心到人体皮肤表面的预设距离,Nh(i)N_ {h(i)}Nh(i)为法线,为在模板上的初始近似标记点位置,见图2左图中的蓝色点。 -
潜在标记点(latent markers) m~i\tilde{m}_im
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 627
627

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









