







 超级会员免费看
超级会员免费看
1.概述
在地图应用中,常用的组合导航得到的定位精度误差在10m-20m,无法准确匹配到对应的道路上,需采用地图匹配 map matching算法将轨迹点匹配到相应路网上。map matching是基于位置服务LBS中的关键预处理步骤,以此为基础对数据进行分析和挖掘,能够辅助解决城市计算中相关问题。
2.方法概述
路网匹配是一个将原始的经纬度坐标转换成一个序列的处理过程,其涉及到的概念和定义如下.
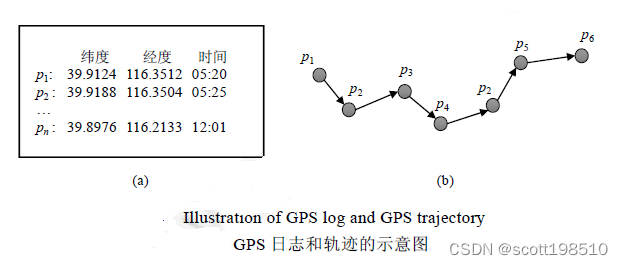
定义1(GPS 日志). 一个GPS 日志是一系列GPS 点的集合L={p1,p2,…,pn}.每个GPS 点包含纬度、经度和时间戳信息,如下(a)所示
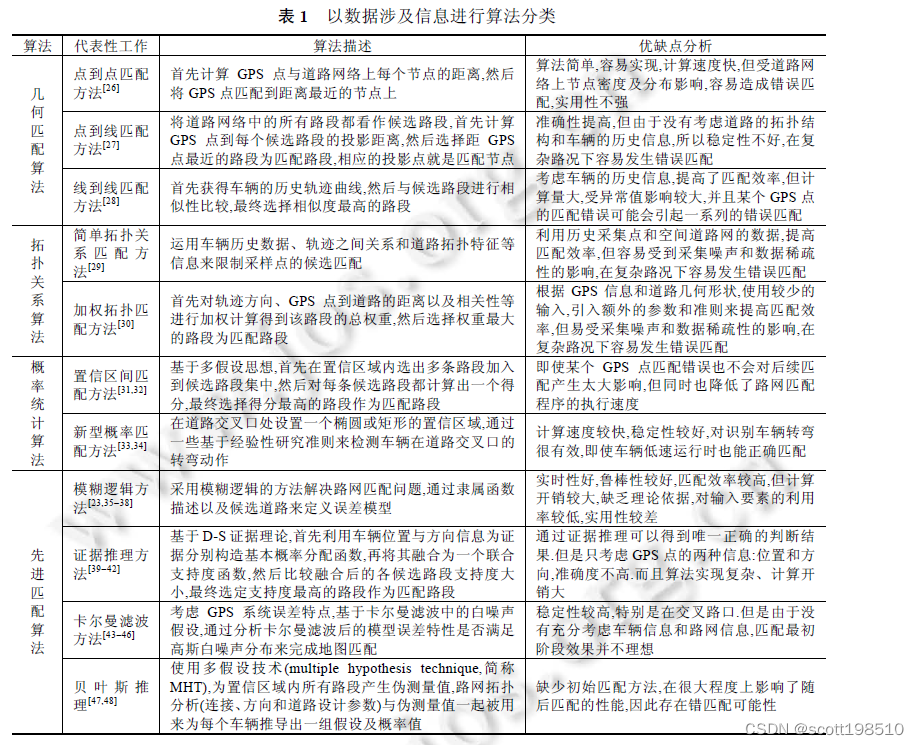
输入数据所涉及的信息,现有的路网匹配算法可以有下列分类标准:
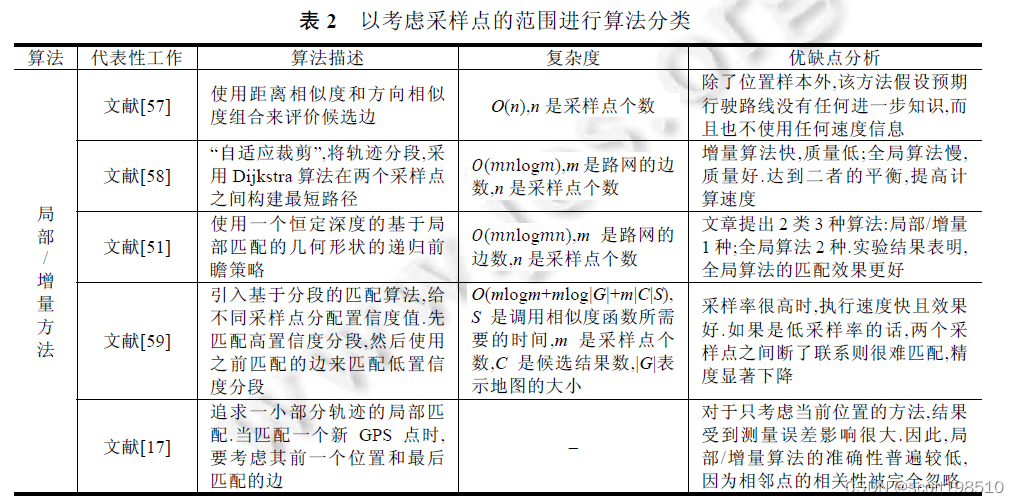
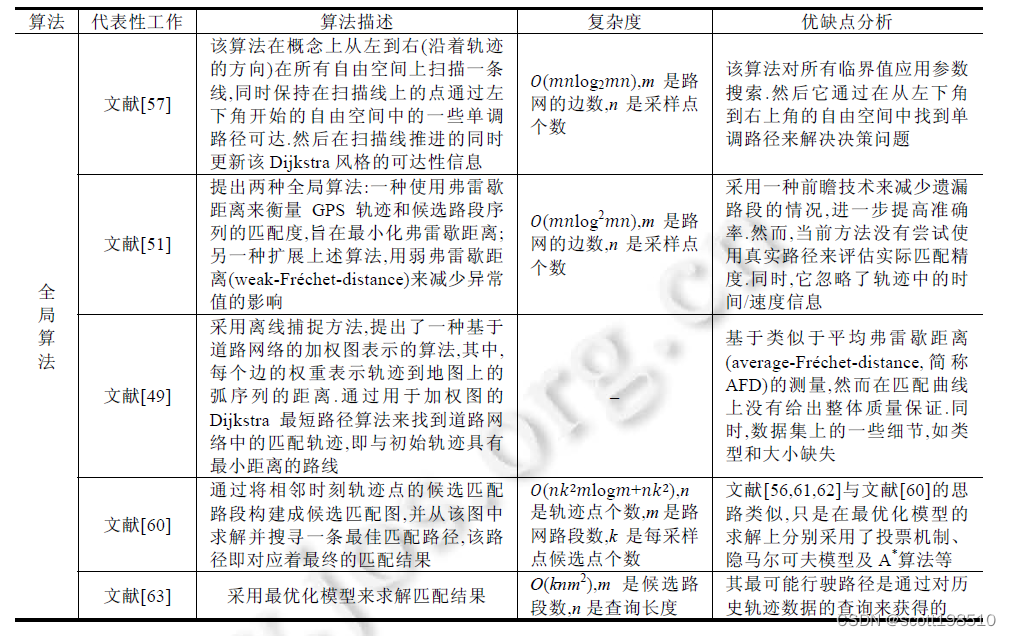
以数据涉及的信息来划分、以考虑采样点的范围来划分、以采样的频率来划分。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 3634
3634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











