







1.概述
超声波雷达Ultra Sonic System,简称USS,也叫倒车雷达,是一种最常见的传感器,它的工作原理是利用超声波发射装置向外发射超声波(是机械波不是电磁波),至利用接收器接收到发送过来超声波时的时间差来测算距离。一般的工作频率分为40kHz、48kHz和58kHz三种。频率越高其灵敏度越高,但是水平与垂直方向的探测角度就越小,所以常常使用的是40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在0.1-3米之间,而且精度较高,因此非常适合应用于泊车。
探测距离满足:
对温度敏感性,使得超声波的速度具有如下特性
或
2.USS车位探测与障碍物检测原理
2.1 USS介绍
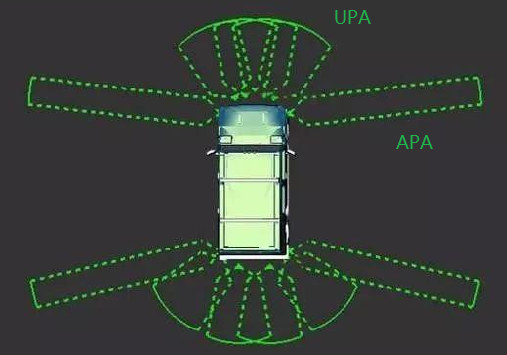
超声波雷达USS主要用于停车辅助和自动泊车,可以分为UPA和APA超声波雷达两种类型。
(1)UPA 超声波雷达:安装在汽车前后保险杠上的,用于测量汽车前后障碍物的倒车雷达,这种雷达被称为UPA。超声波驻车辅助传感器(UPA,Ultrasonic Parking Assistant),探测距离一般在15~250cm 之间,感测距离较短,但是频率较高,为58kHz,精度高;UPA称为短程超声波雷达
(2)APA超声波雷达:安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,称为APA,也是自动泊车辅助传感器(APA,Automatic Parking Assistant),探测距离一般在30~500cm之间,感测距离较长,但是频率较低,为 40kHz,精度一般。一套倒车雷达系统需要在汽车后保险杠内配备4个UPA超声波传感器,自动泊车系统需要在倒车雷达系统基础上,增加4个UPA和4个APA 超声波传感器,构成前 4(UPA)、侧 4(APA)、后 4(UPA) 的布置格局。APA称为长程超声波雷达
超声波雷达也可根据传感器种类细分为等方性传感器超声波雷达和异方性传感器超声波雷达,二者的区别在于水平探测角度与垂直探测角度是否相同。等方性传感器是水平角度与垂直角度相同的传感器。缺点是垂直角度过大,容易探测到地面,受照地问题影响较大,且探测距离较近;优点是产生的超声波波形稳定;异方性传感器是水平角度与垂直角度不同的传感器;缺点是产生的超声波波形不稳定,易产生误报情况;优点是垂直角度小,因而探测距离长,探测范围大。
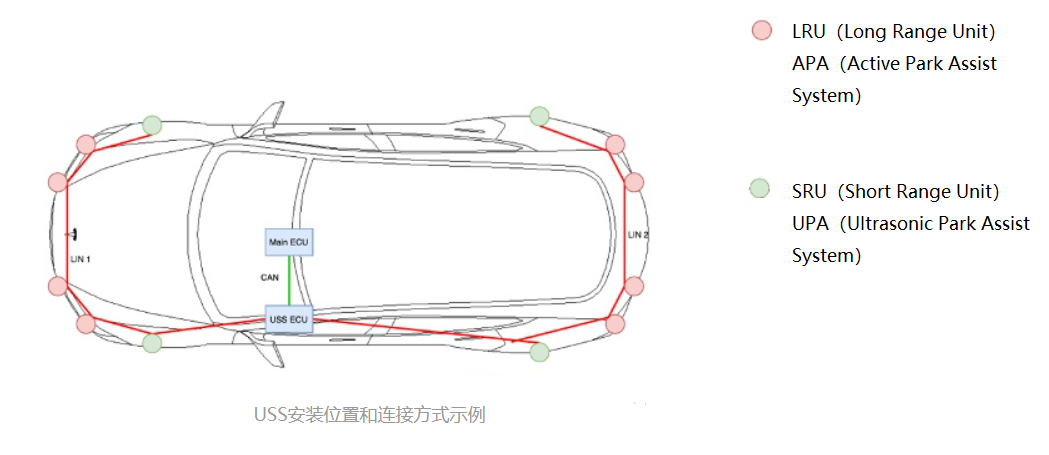
汽车超声波类装配方案多为前后向共8个UPA,左右侧共4个APA,示意图如下。
2.2 检测原理
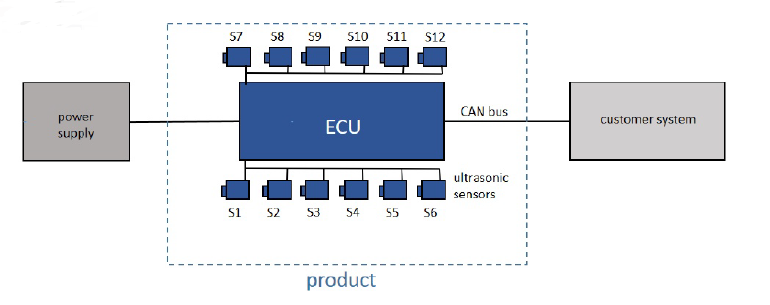
以Bosch 公司产品USS6.5型超声波传感器为例,USS连同一个电子控制单元(ECU)(见图7)。根据用户配置的变化,总共可以应用4、6、8或12个传感器。超声波传感器用作收发器,用于发送和接收超声波信号。此外,对传感器进行数字信号处理,以识别接收信号中的障碍物。得到的数据ECU上进行进一步的处理和评估,以获得可靠的目标距离数据,并估计目标在两个方向上的位置多维目标图。所有的超声波传感器都直接连接到外部供电的ECU。ECU提供CAN总线接口,用于与用户系统进行数据交换(距离和目标数据、诊断信息、参数化)。示意图如下所示:
根据来自ECU的指令,传感器发送超声波脉冲,然后在短暂的延迟时间(减少膜振动的响铃时间)后准备接收。当膜振动衰减时,无法检测到回声。因此,衰减时间定义了测量范围的下限。超声波传感器以43- 60khz范围内的不同调频发送码进行发射。它们在起始和结束频率以及发射脉冲长度方面有所不同。所使用的发送码随测量周期的不同而变化,并由ECU中的控制软件选择。可为用户配置一组不同的发送码设置在传感器中,接收到的信号被数字化,并经过几个信号处理步骤。所实现的匹配滤波方法利用了发射脉冲的频率编码(即发送码),从而最大化信噪比并抑制干扰,例如,外部声源、其他超声波传感器系统或同一系统的超声波传感器在同一测量周期内与另一个发送码一起传输。尽管可以通过其发送码来区分单个超声信号,但并非所有传感器都同时发送超声信号。这减少了传感器之间可能的干扰效应和噪声水平。
同时,通过评估信号的特征(发射和接收信号的相关系数)以及信号的幅度,在接收信号中检测到物体回波。在后一种情况下,使用自适应阈值进行目标检测。该阈值是使用细胞平均过程形成的,因此可以适应噪声水平。它基于当前测量(无延迟)进行实时评估,以确保由于环境变化而产生的快速反应时间。有了这个程序,就不需要使用传感器特性曲线进行静态参数化;传感器的灵敏度会自动适应噪声水平。这平衡了信号波动,例如由于大气衰减的变化,粗糙地面的反射(杂波)或声干扰,从而增加了探测能力。此外,总体灵敏度可以由客户配置(从而产生更高/更低的自适应阈值)。这对于检测性能的特定用例调优是有用的(例如,减少对不需要的地面回波的检测)。
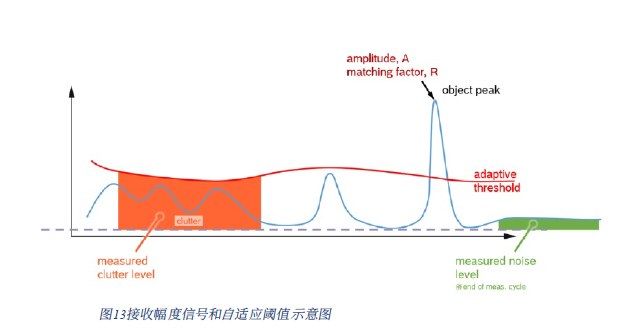
除了已识别回波的行程时间外,还测量了信号幅度等进一步的信号属性。所有回波信息都存储在传感器中,根据优先级进行选择,并通过数字接口传输到ECU。在每个测量周期中,可以获得不同距离的多个物体回波。此外,传感器的噪声水平是确定的,并与每个测量周期转移到ECU。这是通过在大约的窗口中评估信号的电平来完成的。在每个测量周期结束的5.6 ms时,潜在的物体回波变得非常微弱,噪声占主导地位。
系统提供的主要输出是每个传感器的两个最接近的直接回波。然而,对于第一个对象回波,另一个输出信号会被额外计算。在此情况下,应用进一步的信号处理可实现更高的信号稳定性,从而使用户更方便地处理数据。在这种情况下,如果测量周期之间的距离变化被认为是不可信的或物体回波突然丢失,则通过保持先前验证的距离一定时间来稳定回波距离。当物体检测在某些情况下变得不稳定时,这样的稳定性滤波器是非常有用的,在这种情况下,可以观察到信号的频繁丢失或跳到更远的其他物体上。图14举例说明了这种稳定性滤波器对在几个测量周期内丢失的动态回波信号的影响。稳定距离信号还会导致一个小的额外延迟,特别是当物体第一次被检测到以及它移出视场时。稳定滤波器的设计目的是在物体不断接近传感器时提供最小的延迟,从而确保快速的系统响应。

2.3 测量模型
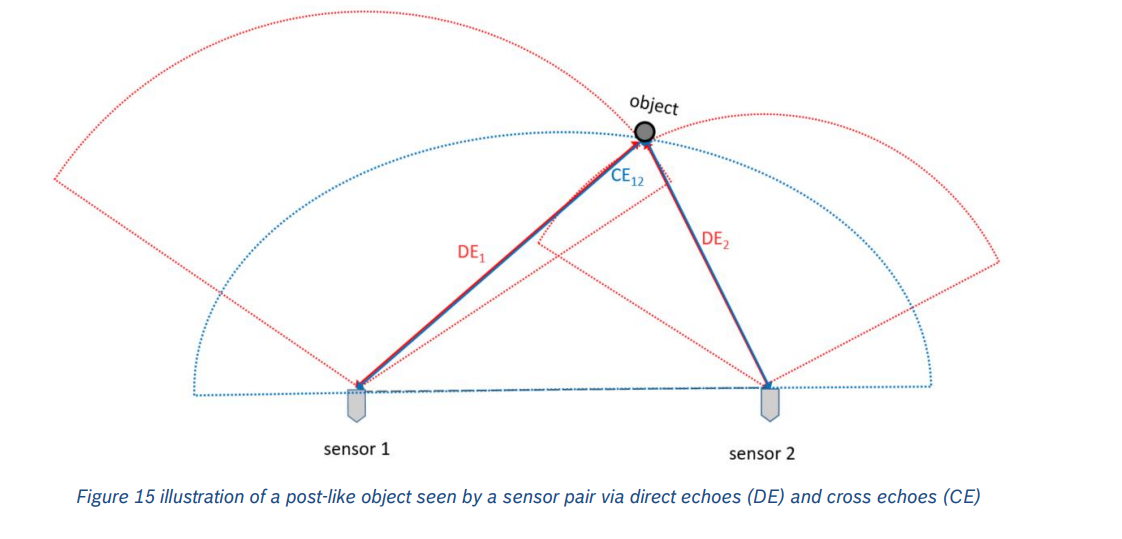
超声波的回波分为直接回波DE(direct echo)和间接回波CE(cross echo)。
对于直接回波DE,使用同一个传感器进行超声波的发送和接收。
对于间接回波CE(通常称为交叉回波) ,回波的发送者和接收者是不同的。间接回波为ECU提供附加信息,因此通常需要有效检测。
多次回波现代超声波传感器可以检测和处理来自一个或多个物体的多次回波。
基于直接回波direct echoes与间接回波 cross echoes得到的测量模型如下。
测得点状障碍物满足:


测得杆状或线状障碍物满足:
3.目标位置检测

为简化推导过程,首先假设目标或障碍物为质点模型。最后可对原始障碍物坐标进行膨胀处理,得到障碍物的目标坐标。
step1: 获取至少两个超声波雷达探头的距离数据:
a. 距离数据包括第一超声波雷达探头检测到的DE1和CE、第二超声波雷达探头检测到的第一检测距 离和第二检测距离.
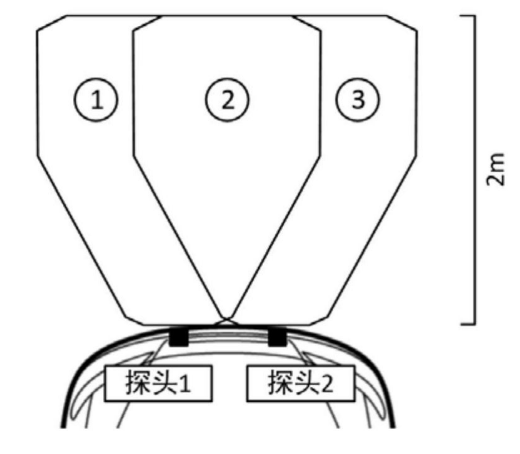
b. 每个探头可以实现自发自收、他发自收两种模式,参见下图中箭头的指向。这两种模式下检测到的距离可以称为直接回波距离DE和间接回波距离CE。
c.根据一个超声波雷达探头检测到的DE和CE、第二个超声波雷达探头检测到DE和CE,判断是否存在障碍物.
d.当存在障碍物时,判断障碍物是否处于第一超声波雷达探头和第二超声波雷达探头检测范围的重叠区域.
e.由于实际情况下检测距离值可能存在跳变、丢失等情况,为了保证任何情况下都能够通过这四个检测距离确定障碍物的位置区域,对分超声波雷达的检测包络模型进行分析.
f.提供的超声波雷达的检测包络模型示意 图。超声波雷达探头的检测范围可以用较简单的扇形模型表示,参见下图,扇形的弧表示该距离处的障碍物。
当障碍物存在于重叠区域时,根据第一超声波雷达探头的第一坐标、二超声波雷达探头的第二坐标,计算障碍物的原始坐标。
两探头的四个检测距离中如果只有一个探头的第一检测距离不为0,则认为该障碍物存在于非重叠区域,位置可以用扇形的弧线来表示。
只有两个探头的第一检测距离都不为0,该障碍物才存在于重叠区域内,此时可以利用公式计算障碍物的原始坐标。
给出障碍物的原始坐标计算公式如下:
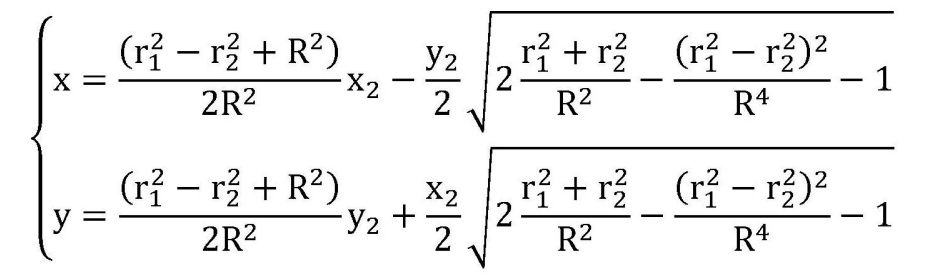
其中,(x1,y1)为第一超声波雷达探头的第一坐标,可以将第一坐标作为原点。(x2,y2)为第二超声波雷达探头的第二坐标,(x,y)为障碍物的原始坐标,r1为第一超声波雷达探头检测到的DE距离,r2为第二超声波雷达探头检测到的DE, 且仅保留了y>0的障碍物坐标。
特别说明,公式只有在|r1-r2|<R时才成立,当不满足此条件时,则认为此时有两个障碍物分别处于①、③区域。
对于区域①、③内的障碍物坐标没有用公式计算,而是根据扇形包络模型,确定障碍物的位置坐标。 随着探头数目增多,非重叠区域减少,可用检测距离会变得更多, 定位效果更好。
两探头的四个检测距离中如果只有一个探头的第一检测距离不为0,则认为该障碍物存在于非重叠区域,位置可以用扇形的弧线来表示。只有两个探头的第一检测 距离都不为0,该障碍物才存在于重叠区域内,此时可以利用上述障碍物坐标公式计算障碍物的原始坐标。
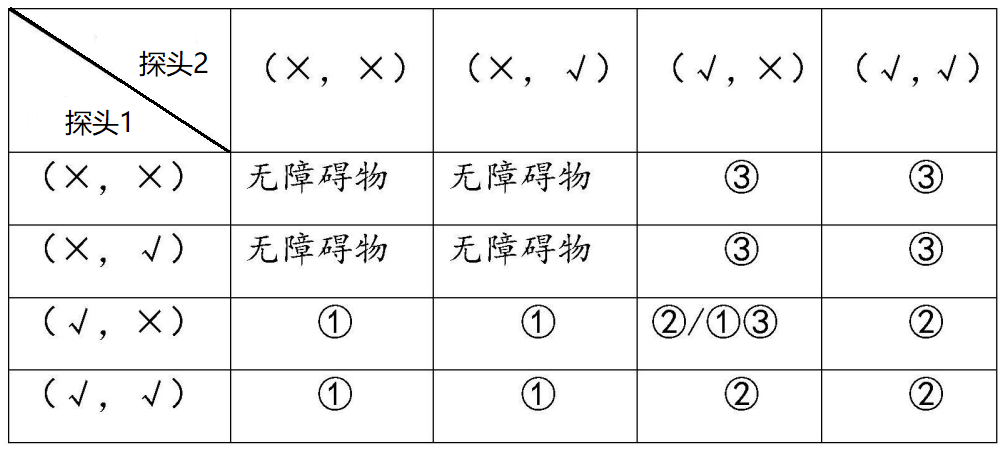
针对实际使用中的误检、漏检情况进行分析,用×、√符号表示是否接收到距离 值,比如(×,√)表示探头的DE距离d1=0,CE距离d2≠0。参见表1,表1为探头探测出的障碍物区域表。

4.参考文献
BODAS Ultra Sonic System Application Manual

















 9688
9688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











