







 超级会员免费看
超级会员免费看
本文遵循autosar标准:R22-11
1 简介及功能概述
本规范描述了AUTOSAR 基础软件模块CAN XL 驱动程序的功能、API和配置。
本文档的基础是[1,CiA610-1]和[2,CiA611-1]。假设读者熟悉这些规范。本文档不会再次描述CAN XL 功能。
CAN XL 驱动程序是最低层的一部分,执行硬件访问并向上层提供独立于硬件的API。可以访问CAN XL 驱动程序的两个上层是CanIf 和EthIf 模块。
CAN XL 驱动程序是CAN 驱动程序模块的扩展,因此本文档仅提供扩展现有CAN 堆栈的信息和规范。
为了更好地理解,提供了一些一般信息。
CAN XL 驱动程序提供启动传输的服务,并调用CanIf 和EthIf 模块的回调函数来通知事件,独立于硬件。
此外,它还提供控制CAN XL 控制器特定硬件的服务,包括通用CAN XL 帧的传输和接收。
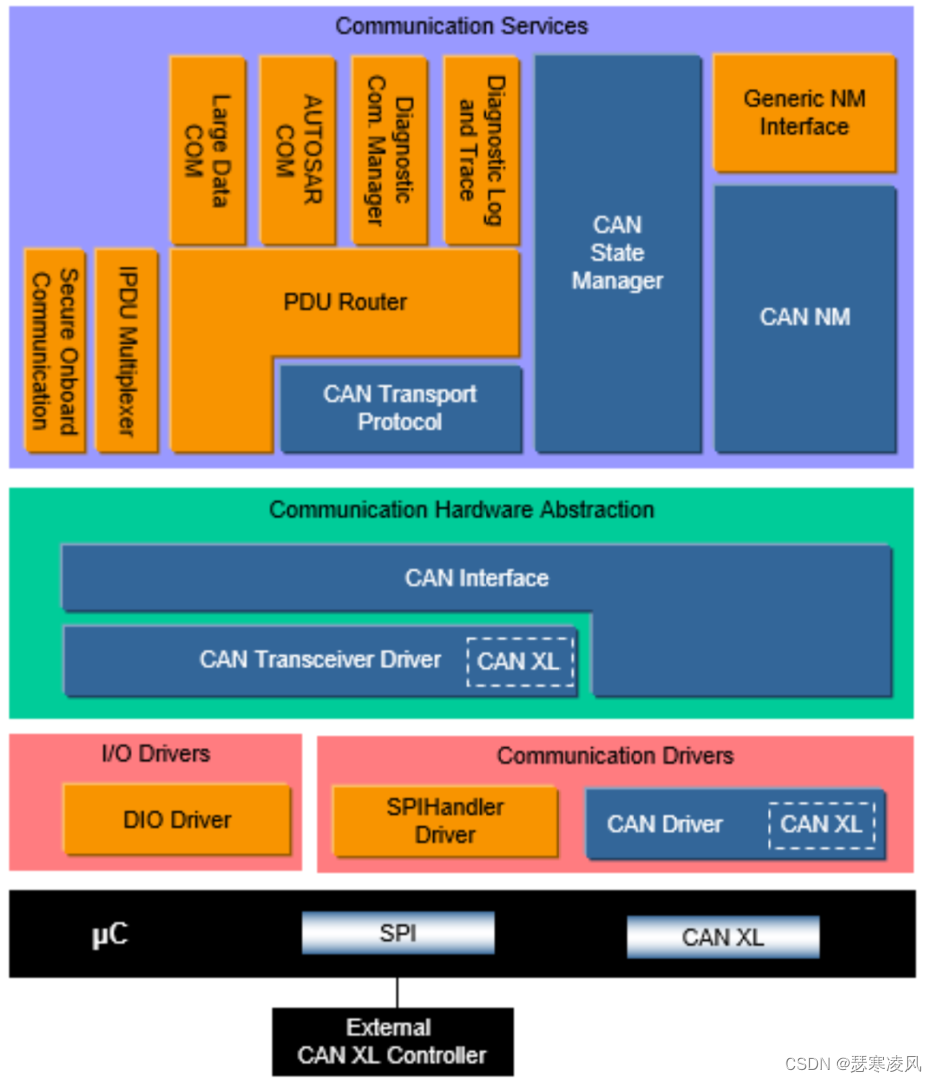
Autosar CanXL分层架构:
2 首字母缩写词和缩写词
下面的术语表包含与CAN XL 驱动程序模块相关的首字母缩略词和缩写词,这些缩写词和缩写词未包含在[3,AUTOSAR词汇表]中。

3 相关文档
3.1 输入文件及相关标准规范
[

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 2549
2549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











