






[阅读心得] 多目标跟踪经典论文——Tracktor++
写在前面
不同于多目标跟踪领域常见的Tracking-by-Detection范式,本文提出了一种直接利用上一帧检测结果进行回归的范式,没有额外的约束或者的优化技巧,直接达到了当年的SOTA,笔者认为,在运动模型设计等方面还有很大的改进空间。
1. Abstract
首先,本文提出了一种基于bbox和检测器回归的方式进行下一帧的跟踪预测的模型Tracktor,相当于直接把检测器转变成跟踪器。同时,提出的跟踪器甚至不需要额外的跟踪数据训练、仅仅依靠训练好的two-stage检测器就能实现。
其次,通过添加ReID模型和CMC相机补偿模型,将提出的模型扩展为Tracktor++,达到了SOTA水平。
最后,论文分析了目前跟踪器的性能局限,提出了遮挡严重、目标尺寸过小是目前限制跟踪器性能的主要场景,提倡后续研究着重沿着此方向进行。
2. Related Work
目前,多目标跟踪任务在遮挡和难检测的拥挤场景下,仍然存在很大问题。
如今解决跟踪问题主要有三种思路,分别是基于图的匹配、基于外观特征的匹配、基于运动模型的匹配。但是存在各自的局限性,不能很好的解决上述场景下的跟踪问题。
- 基于图的匹配:将检测目标看作节点,之间的相似性作为边,将任务转化为一个图的问题。最近的工作往往尝试更复杂的建模包括引入多相机、动作识别、分割等考虑因素。这种方式的缺点在于,巨大的计算量往往没法转换成明显的跟踪性能提升。
- 基于外形特征:目前多数使用color-based的REID模型。这种方法的缺点在于:一旦存在穿着相似、背景或者光线干扰等因素,产生的外形特征就会出错。
- 基于运动模型:目前多采用匀速运动模型进行运动估计,这种方法的缺点在于:行人的运动往往更加复杂
3. Trackor++
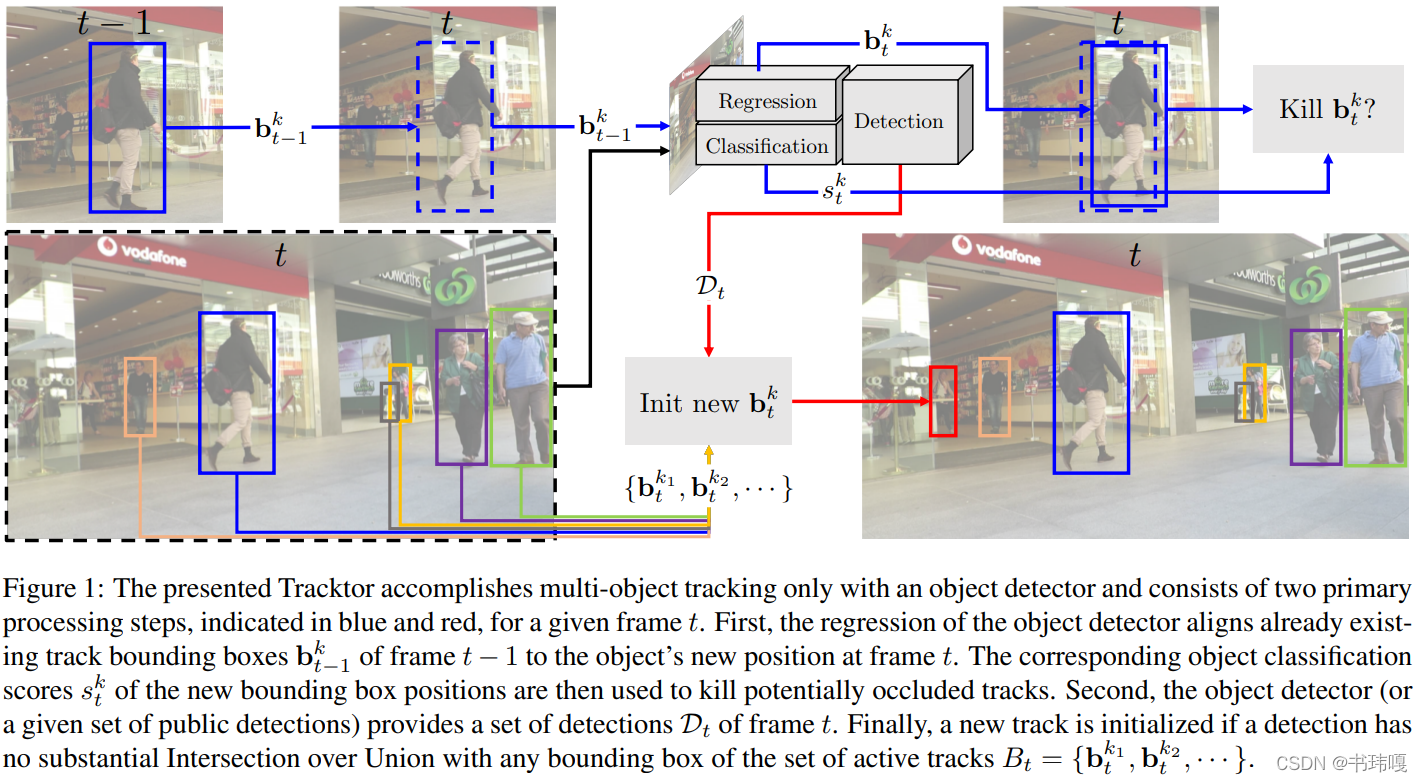
Tracktor总体结构如图所示:
3.1 Object Detector
本文中主要采用两阶段的目标检测模型Faster R-CNN,包含ResNet-101和FPN,在MOT17Det数据集上进行训练(注意没有依靠任何跟踪层面的标注数据)
简单介绍一下检测流程:首先,Faster R-CNN先采用RPN网络生成众多bbox proposals。随后,通过ROI pooling提取每个proposal的特征图,输入到第二阶段的Classification Head 和Regression Head。最终,通过NMS筛选获得最终的检测结果作为输出
3.2 Tracktor*
如上图所示,通过Tracktor完成跟踪任务需要两个基本的阶段:BBox Regression和Track Initialization。
BBox Regression*
该过程如上图蓝色箭头所示:
- 生成bbox :对第t帧的跟踪任务,选择将第t-1帧检测到的目标生成的bbox对应特征图继承,将其输入到两个Head中进行分类和回归,而不是从ROI中生成。本质上是基于上一帧回归预测当前帧。
- 筛选生成的bbox:生成bbox之后,还需要判断是否保留这个bbox,主要有两个依据:
1)目标bbox被背景遮挡等导致class置信度 s t k < σ a c t i v e s^k_t < \sigma_{active} stk<σactive
2)目标bbox与其他目标bbox重叠,通过NMS筛选
这么做的根本逻辑前提是:相邻帧间目标的移动都是轻微的。这一前提依赖于视频是高帧率的,否则需要一些运动模型做补偿。
BBox Initialization*
该过程如上如红色箭头所示:
- 对第0帧:检测到的目标通过NMS筛选的都保留,均新建各自对应的ID
- 对其他帧:检测到的目标如果和BBox Regression阶段生成的任何一个bbox的 I O U < λ n e w IOU<\lambda_{new} IOU<λnew,则创建新轨迹ID
这一过程主要是为了将过程中新出现的目标涵盖进来。
3.3 Tracking Extension
这一部分提出了两个扩展模块:Motion Model 和 ReID Model 来增强Tracktor的性能。
Motion Model
在3.2中假设:目标在帧间的移动是细微的。 但是存在两种情况不满足该假设:
1)相机运动较大; 2) 视频帧率较低。
因此,在一般情况下都使用集中基于ECC技术的相机去抖补偿CMC,如果视频帧率较低,采用CVA手段对目标运动进行补偿。
ReID Model
为了保证实时性,通过Siamese 网络生成一个较小的REID向量,用于进行匹配。
4. Experiment
4.1 Object Visibility
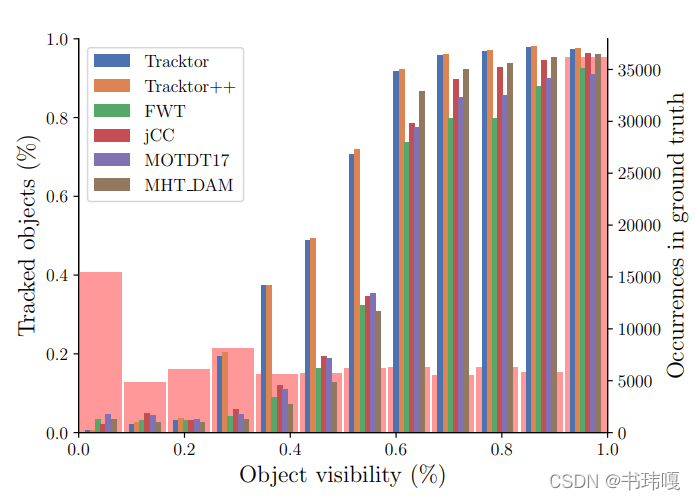
- Tracktor++对目标遮挡率0.3以上都能保持一定的跟踪能力
- 遮挡情况确实会影响所有算法的跟踪性能,遮挡越严重,跟踪性能越差
- Tracktor++相对Tracktor仅有微量性能上的提升
4.2 Object Size
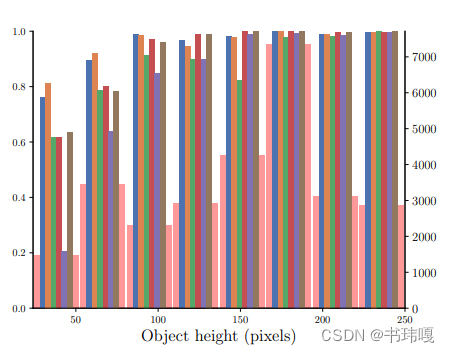
- 目标尺寸确实会影响跟踪性能,目标越小,跟踪性能越差
- Tracktor++ 的FPN在一定程度上环节了小目标情况跟踪性能变差的情况
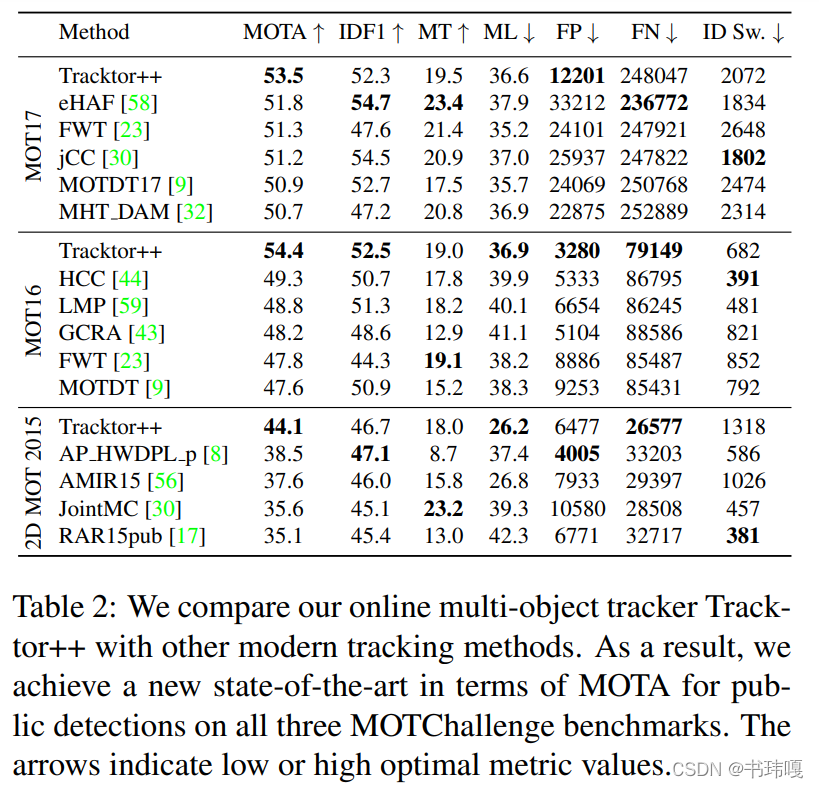
4.3 Benchmark Evaluation
5. Conclusion
本文提出了一种利用检测器做基于Bounding Box的回归的跟踪模型Tracktor++,从而提出了一种新的范式,这种范式下甚至不需要单独为跟踪任务做标注,只需要训练好一个two-stage的检测器即可。
另外通过实验,发现目前所有跟踪算法的缺陷是:面对严重的遮挡问题、小目标跟踪问题等情况均没有较好的鲁棒性。这也是后续工作中需要专注改进的方面。

















 1493
1493

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









