







【实例
16
】预警启动
1.PLC
控制任务说明
为保证设备的运行安全,许多大型生产机械(如起重机、龙门刨床等)在运行启动之前都用电铃或
蜂鸣器发出报警信号,预示设备即将启动,警告人们迅速退出危险地段。
控制要求如下:启动时,按一下启动按钮,电铃响
5s
,期间,警示灯快速闪烁,然后,电动机自动
启动;按停止按钮后,电动机立即停止。
2.
电气接线
预警启动的电气接线如图
3-17
所示。图中,输入启动按钮
SB2
为
I0.0
,停止按钮
SB1
为
I0.1
;输
出
Q0.0
连接电铃
HA
,
Q0.1
连接报警灯
EL
,
Q0.2
连接电动机接触器
KM
。
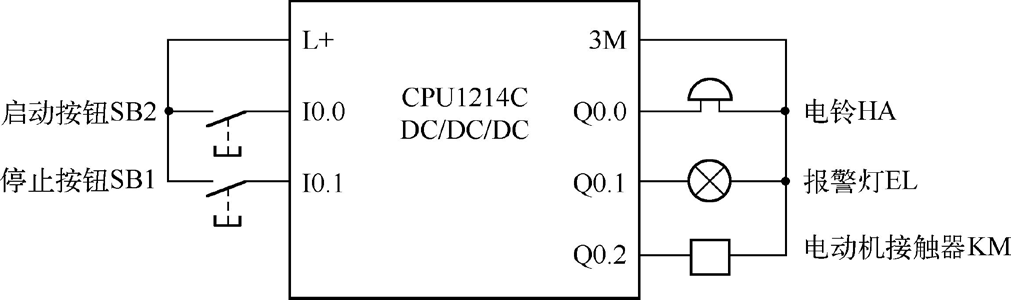
图
3-17
预警启动的电气接线
3.PLC
编程
预警启动的
PLC
梯形图如图
3-18
所示。图中,程序段
1
和程序段
2
与【实例
6
】相同,主要用于完成一 个报警灯的闪烁;程序段3
~程序段
5
用于完成延时启动电动机接触器;程序段
6
用于完成在启动按钮动作后、电动机接触器动作之前的电铃和报警灯闪烁。
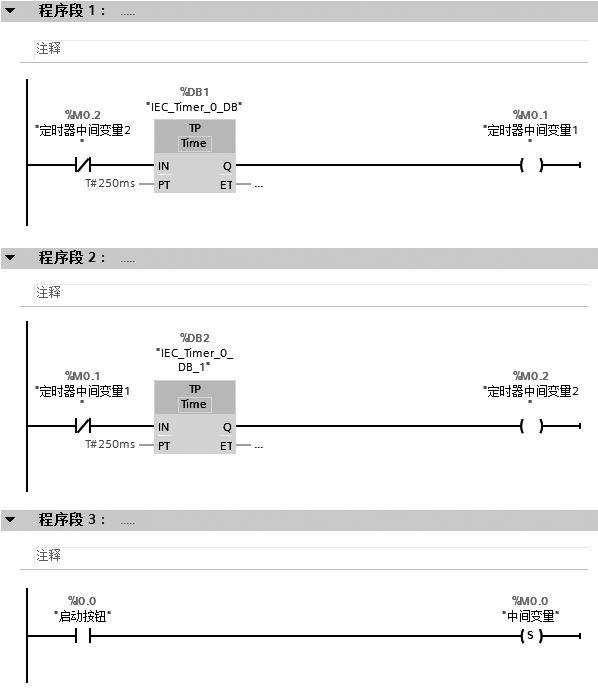
图
3-18
预警启动的
PLC
梯形图
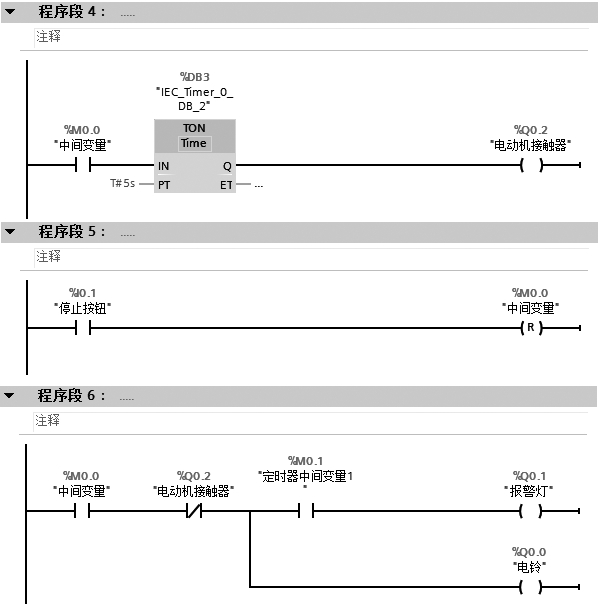
图
3-18
预警启动的
PLC
梯形图(续)
预警启动的时序图如图
3-19
所示。
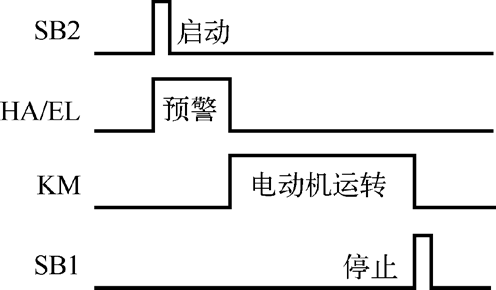
图
3-19
预警启动的时序图
3.3.2
【实例
17
】单按钮定时预警启
/
停控制
1.PLC
控制任务说明
用一个按钮控制一台电动机的报警、启动和停止。启动时,按下按钮,电铃响起,报警灯闪烁;再
按一下按钮后,电铃和报警灯停止,电动机开始启动。停止时,按一下按钮,电铃响起,报警灯闪烁;再按一下按钮后,电铃和报警灯停止,电动机也停止。
2.
电气接线
单按钮定时预警启
/
停控制的电气接线如图
3-20
所示。图中,输入按钮
SB1
为
I0.0
;输出
Q0.0
连接电铃HA
,
Q0.1
连接报警灯
EL
,
Q0.2
连接电动机接触器
KM
。
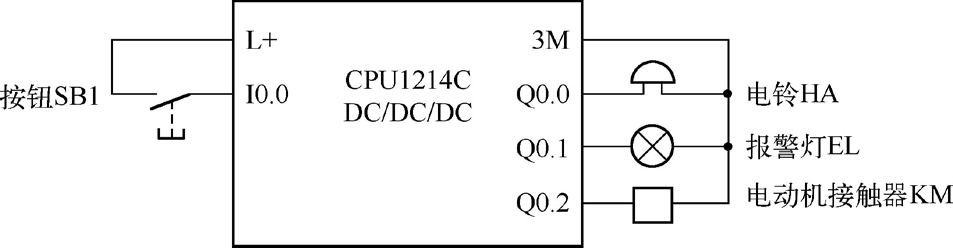
图
3-20
单按钮定时预警启
/
停控制的电气接线
3.PLC
编程
单按钮定时预警启
/
停控制的时序图如图
3-21
所示。图中引入状态值
MW2
,根据按钮
SB
的动作,可
以通过数学运算从
0
一直累加到
4
,再依次循环,不同状态值时的动作方式不同,具体为:
MW2=0
,初始化状态;MW2=1
,预警状态,即电铃响起和报警灯闪烁;
MW2=2
,电动机接触器动作,即电动机启动;MW2=3
,电动机仍在运转状态,同时预警;
MW2=4
,预警停止,电动机停止,状态值
MW2
归零。
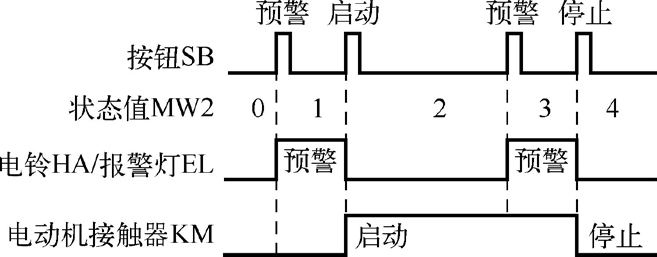
图
3-21
单按钮定时预警启
/
停控制的时序图
单按钮定时预警启
/
停控制的
PLC
梯形图(
OB100
初始化)如图
3-22
所示。单按钮定时预警启
/
停控制的PLC
梯形图(
OB1
主程序)如图
3-23
所示。共有两个
OB
块,即初始化
OB100
,主要完成状态
值
MW2=0
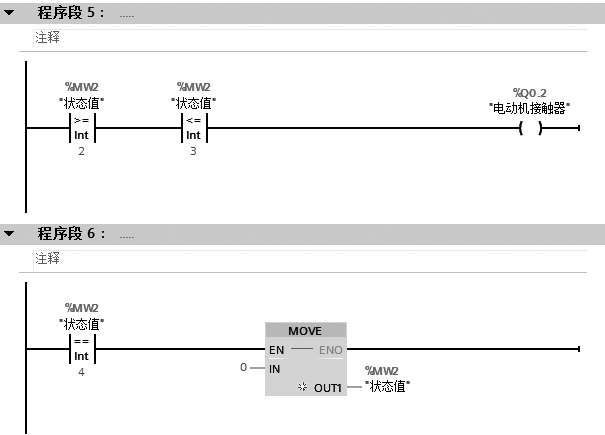
。在主程序
OB1
中,程序段
1
和程序段
2
主要用于完成一个报警灯闪烁。程序段
3
用于完成状态值的累加。程序段4
用于完成在状态值
MW2=1
或
3
时,电铃和报警灯的闪烁。程序段
5
用于完成MW2=2
或
3
时,启动电动机接触器。程序段
6
用于完成状态值
MW2
的归零。
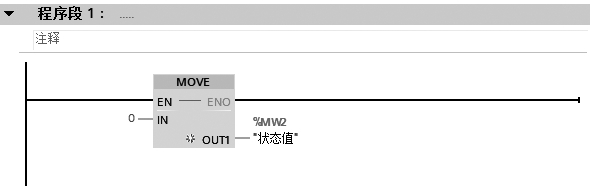
图
3-22
单按钮定时预警启
/
停控制的
PLC
梯形图(
OB100
初始化)
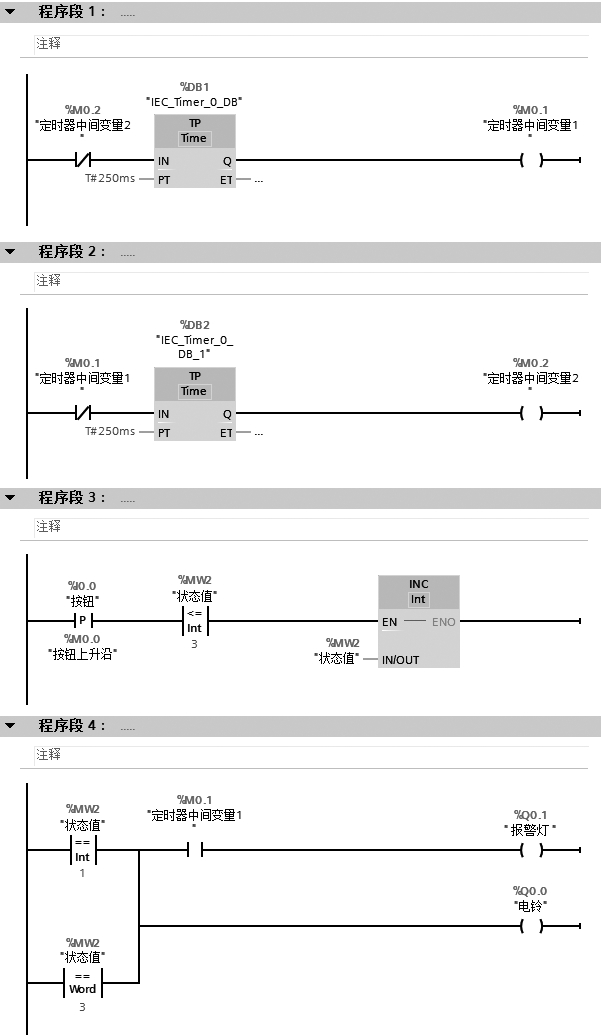
图
3-23
单按钮定时预警启
/
停控制的
PLC
梯形图(
OB1
主程序)
图
3-23
单按钮定时预警启
/
停控制的
PLC
梯形图(
OB1
主程序)(续)
3.3.3
【实例
18
】皮带跑偏报警控制
1.PLC
控制任务说明
某皮带输送机用跑偏传感器进行纠偏,如图
3-24
所示,当通过纠偏还是无法达到效果时将进行报
警、降速甚至停机。具体要求如下:该皮带输送机用一个按钮控制启
/
停,正常时为高速运行,在高速运行过程中,如果跑偏传感器1
或跑偏传感器
2
感应到皮带跑偏后,报警灯就会闪烁;如果
5s
内仍无法纠偏皮带,则皮带输送机会立即转入低速运行状态,报警灯仍然闪烁;在低速运行期间,跑偏传感器1
或跑偏传感器2
还是感应到皮带跑偏,且持续时间达到
5s
,则皮带输送机就会停机,并启动电铃,报警灯闪烁。需要注意的是,复位按钮只有在跑偏传感器1
和跑偏传感器
2
都正常的情况下才会执行相关的复位指令。
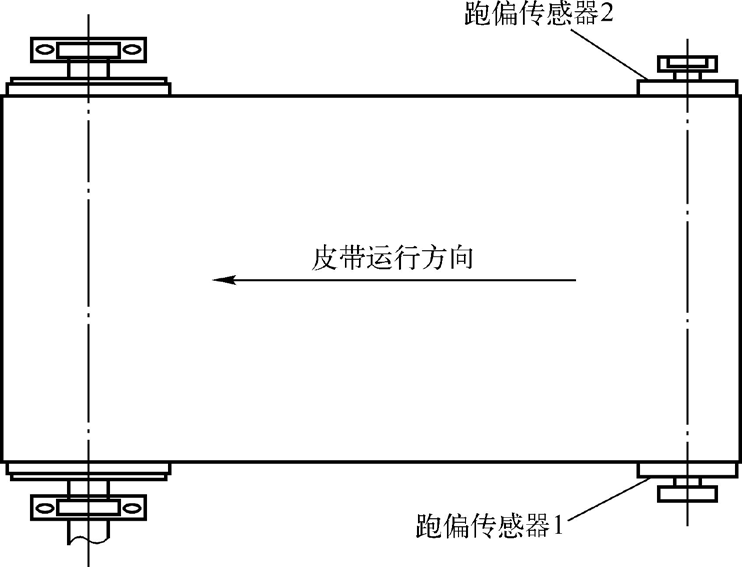 图3-24 皮带输送机纠偏示意
图3-24 皮带输送机纠偏示意
2.
电气接线
皮带跑偏报警控制的电气接线如图
3-25
所示。图中,启
/
停按钮
SB1
为
I0.0
,跑偏传感器
1
和跑偏传感器2
分别为
I0.1
和
I0.2
,复位按钮
SB2
为
I0.3
;电铃
HA
为
Q0.0
,报警灯
EL
为
Q0.1
,高速接触
器
KM1
为
Q0.2
,低速接触器
KM2
为
Q0.3
。
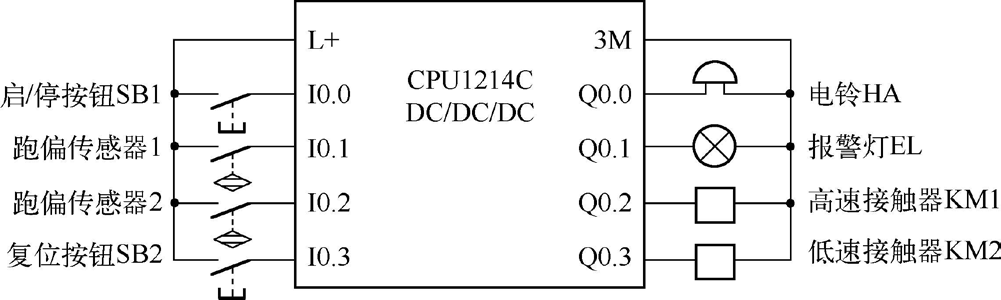
图
3-25
皮带跑偏报警控制的电气接线
3.PLC
编程
由于采用单按钮控制启
/
停,因此引入状态值
MW2
,根据启停按钮
SB1
的动作,可以通过数学运算获取不同的启/
停状态,即
MW2=0
表示停机、
MW2=1
表示运行。在运行过程中,根据跑偏传感器的状态可以切换为高速或低速,甚至停机。
图
3-26
为
OB100
初始化梯形图程序,即将
MW2
进行复位。
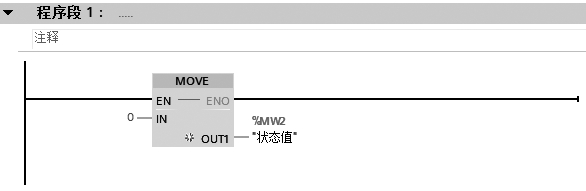
图
3-26 OB100
初始化梯形图程序
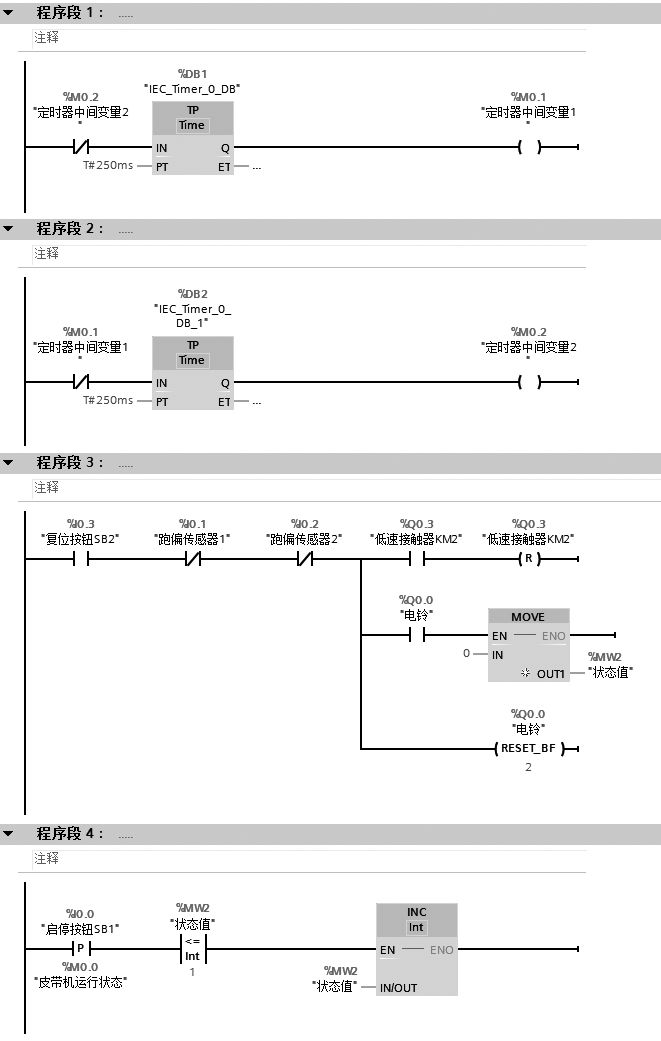
图
3-27
为
OB1
主程序的梯形图。程序段
1
和程序段
2
为定时闪烁脉冲。程序段
3
为在跑偏传感器
1
和跑 偏传感器2
都正常的情况下执行复位。程序段
4
和程序段
5
为启
/
停控制,即运行状态值
MW2
在
0
、
1
之间切 换。程序段6
为停机时,将高速接触器、低速接触器复位。程序段
7
为高速接触器的启动条件。程序段8
为高速运行过程中,如果跑偏传感器
1
或跑偏传感器
2
感应到皮带跑偏,
5s
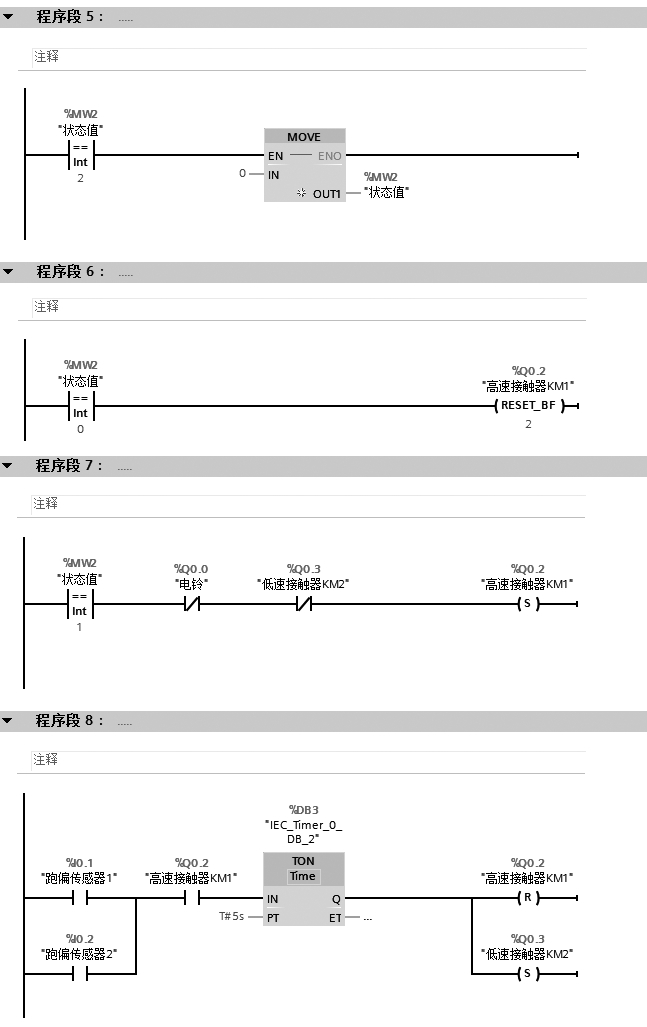
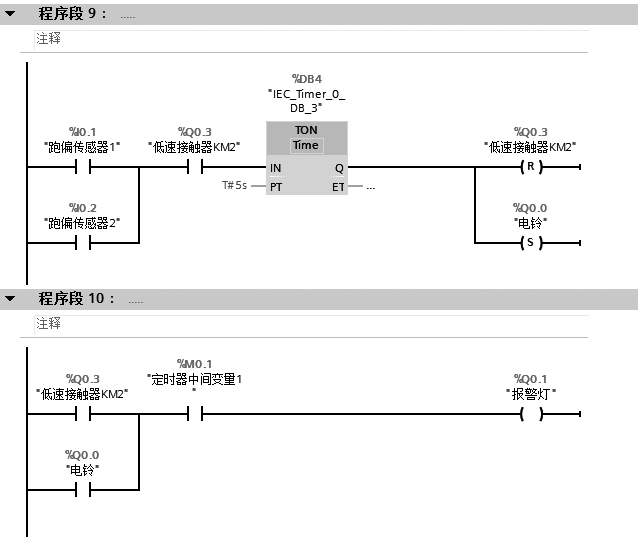
内仍无法纠偏皮带,则皮带输送机会立即转入低速运行状态。程序段9
为在低速运行期间,跑偏传感器
1
或跑偏传感器
2
还是感应到皮带跑偏,且持续时间达到5s
,则皮带输送机就会停机。程序段
10
为报警灯闪烁的条件。
图
3-27 OB1
主程序的梯形图
图
3-27 OB1
主程序的梯形图(续)
图
3-27 OB1
主程序的梯形图(续)

















 900
900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









