





IMLS-SLAM 论文学习
)
写作背景
应学长要求,在此做论文与代码的阅读整理。
本文章来源论文《IMLS-SLAM: scan-to-model matching based on 3D data》
摘要
论文展示了一个仅依赖点云数据的低漂移(low-drift)SLAM算法。
方法依赖于一个scan-to-model的匹配框架。
无闭环情况下4km,仅有16m的误差,即0.40%。
scan egomotion 和 动态对象删除
一次scan S是雷达传感器一次rotation获得的数据。
在rotation过程中,汽车正在移动,我们需要创建一个考虑这种变化的点云。
egomotion:在一次scan时间内汽车的移动
我们假定在两次连续的scans中,egomotion大致相同。我们用之前的位移估计当前的egomoiton。在一次scan中雷达角度和位置的变化是线性的。
τ(t):在时刻t,汽车相对起始点的位置。
τ(t_k):汽车在scan_k结束时的位置;即scan_k结束时刻为t_k。
t时刻(tk-1<t<tk)汽车位置可以在τ(tk-1)和τ(tk)之间线性插值。为了获得矫正的local点云,我们需要首先获得
估计值τ(t_k)=τ(t_k-1)*τ(t_k-1)*τ(t_k-2)^-1。
在匹配scan和model之前,我们要去除scan中所有移动物体。我们采用去除所有可能会动的小物体的方法:首先,删去地面点云,聚类,并抛弃所有(bounding box的)长小于14m,宽小于14m,高小于4m的物体。剩下的结构足够我们匹配。最后添上去掉的地面点云。
scan特征点选取策略
一旦我们创建了scan的unwarped点云,我们需要选择特征去匹配。传统ICP是随机选择特征点。论文《Geometrically stable sampling for the ICP algorithm》给出了一个采用scan点云的协方差矩阵去寻找几何稳定的特征点。且证明了如果选择合适ICP方法收敛。
该论文方法来源于这个方法,但有所不同。放弃使用点云的主轴(由点云协方差矩阵算得),而是保持汽车框架的坐标轴不变。我们定义
(X_v,Y_v,Z_v):scan中点云在汽车框架坐标轴下的坐标。
这样大部分平面区域都会和轴对齐,例如地面是Z轴平移的参照,立面是XY轴上变换的参考。
首先我们计算每个点的法向。为了计算速度,使用论文《Fast and accurate computation of surface normals from range images》提出的SRI Derivative approach计算法向,并获得以下九个值:

我们的场景中并非一定要有平面出现,但是平面区域的出现可以提高算法的性能。这也为什么我们使用a2D参与计算。
前六个来自点xi值汽车的三个未知的角度相关(roll,pitch,yaw,即姿态的三个自由度)。而后三个与位置上的变换相关。
我们将所有点分别关于该九个值降序排序,获得九个序列。
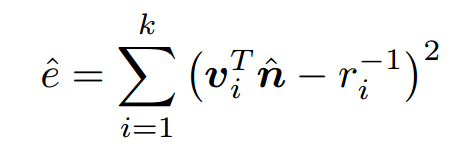
我们从每个序列的前端取点,然后寻找该特征点x在model中最近的点pc。只有当
才保留该特征点。其中参数r是待定参数,这一步是为了去除离群点(outliers)。重复该过程直到从每个序列中获得s个特征点,即一共获得9s个特征点。
基于IMLS的scan-to-match匹配
论文《Provably good moving least squares》阐释了IMLS框架。
我们定义点云map Pk 是前n张经过定位矫正后的scans的集合。所以Pk不仅包含了雷达测量误差,也包含scans的定位误差。使用IMLS框架我们隐函数IPk(x):

其中pi是Pk中的点,ni是pi处的法向。
权
其中h时模型IMLS的参数,与点云采样密度和噪声有关。
该隐函数表示x距离隐含在点云Pk中的曲面的距离。
观察这个权,我们不难发现Wi(x)在x距离pi较远时,会迅速减小,且当距离为3h时,Wi(x)<0.0002。所以,应用该式时我们只需要考虑以pi为中心3h为半径的邻域。
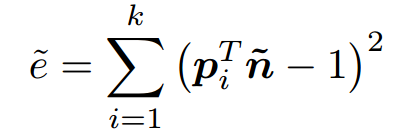
我们想要在map Pk中定位当前的scan Sk,我们需要找到变换R和t使得,误差

最小。
即拟合变换后的scan Sk与map Pk。
因为指数权重的存在,我们不能直接采用ICP方法迭代。
所以定义一个映射:

将map Sk上的点xi映射为yi,其中nj为map上距离xj最近点的法向。
即yj是xj对map中曲面做垂线获得的垂足。
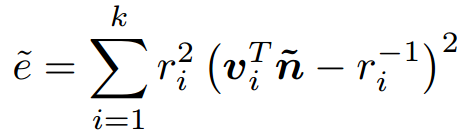
将误差换一种写法:

而该式可以用线性最小二乘获得其解。
所以整个迭代过程是 获得scan中所有点的映射点云Yk,可以获得一组变换(R,t),然后将scan点云Sk做(R,t)变换获得S’k,再取得其映射点云Y’k,获得新的(R’,t’)。重复直到(R,t)几乎为0。
最后取得的scan点云Sk,即是经过定位矫正后的点云,将其添入map中,继续下一张scan的迭代计算。
附1:论文《Fast and accurate computation of surface normals from range images》简述
以往获得一个点的切平面或者法向,都是对该点的邻域采用最小二乘法。但是该方法计算代价昂贵,论文提出了一种通过对来自spherical range image的表面求导的方法直接获得法向的方法。
首先引入表示方法:
球面坐标系:
m=(r,θ,Φ)_T
其中,r是range,即距离。θ,Φ分别是两个偏向角(azimuth,elevation component)。
笛卡尔坐标系下:
p = (x,y,z)_T
Aphercial Range Image(SRI) 是一个函数 s(θ,Φ),指在从原点出发,在方向(θ,Φ)上,某点的深度(range,distance)。
几个传统最小二乘法:
1,Traditional Total Least Squares
目标切平面 n_x+n_y+n_z-d = 0 ;
即是目标法向 n=(n_x,n_y,n_z)_T ;
最小化误差
其中p_i是目标点邻域点云中的点。
其解n是对应矩阵M中最小特征值的特征向量。

2,Normalized Least Squares
取

K是一个下三角阵,由下式确定:

然后再从M’获取目标法向。
3,Unconstrained Least Squares
将第一种方法的误差函数两边同时除以d的平方:
其解n~:
 其中:
其中:
 目标法向:
目标法向:
4,Fast Approximate Least Squares
我们即球坐标系和笛卡尔坐标系的转化为:
p = rv
p是31的列向量,点的笛卡尔下的坐标。
r是球坐标系下的range,v是用θ和Φ表示的31的列向量。
对误差函数右边提出ri。
因为点都来自一个邻域ri认为相等。
由此获得结果:

SRI求导法:
del算子:
笛卡尔坐标系下del算子:
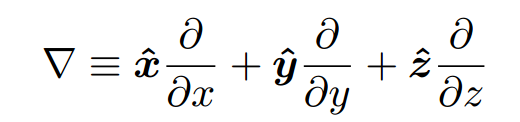
其中x^, y^, z^是坐标系上三个方向上的单位向量。
应用链式法则带入球坐标系中:
 即对某关于(r,θ,Φ)的函数求导,可以获得一个用x^ ,y^ ,z^表示的变化量。
即对某关于(r,θ,Φ)的函数求导,可以获得一个用x^ ,y^ ,z^表示的变化量。
而对SRI函数应用del算子,可得:
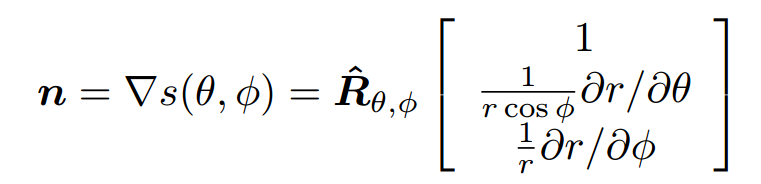
其中:

附2,论文《dimensionality based scale selection in 3d lidar point clouds》简述
论文提出了一个多尺度方法计算点云图的鲁棒几何特征,以期获得每个点的最优邻域大小。邻域点的分布一般用来估计局部的几何特征,找到对每个点最合适的邻域是很多应用所共有的重要问题。传统上,邻域检索是通过查找目标点最近k个点或者以目标点为中心的几何体包含点来实现的。但他们都有共有的问题:1,k值或者几何体半径都是启发式地选择。2,常量而非数据引导。
论文目的在于提出一个方法寻找最优邻域半径。所谓最优邻域半径是指:与目标点属于同一对象的空间闭合点的最大集合。
论文提出了一个说法,指一个点云局部几何结构更具有1线性性(linear)2平面性(planar)3空间性(volumetric)。据我理解就是一个点云集排列成线,其线性性大于其他两个性质;如果排列成面,则平面性最为突出;同样,如果形成一个闭合球面,则点云具有空间性。
这三个维度性质我们记为a1D,a2D,a3D。
采用球面定义邻域:
邻域点云VrP是以目标点P为中心,尺度(scale) r为半径的球面所包围的所有点。

该定义方法具有各向同性和旋转不变性,且r是唯一一个需要优化的参数。
使用PCA获得三个维度性质:


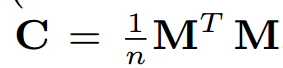
此时C是一个3*3对称正定阵,特征分解,获得三个特征值λ1,λ2,λ3。(λ1>λ2>λ3)
σj = 根号λj 是特征向量vj方向下的标准差。
此时,PCA分解结果是一个三维椭球,三个轴的方向分别是3个特征向量,长度为特征值 。该椭球揭示了该邻域集在三个维度上的表现。
我们得到
a1D = σ1-σ2 /μ
a2D = σ2-σ3 / μ
a3D = σ3 / μ
我们选择μ=σ1,使得a1D+a2D+a3D=1
尺度r的选择:
首先确定尺度r的上下界rmin,rmax:
最小边界的选择取决于 1点云噪声2传感器规格3计算约束
1:局部散射:可能来源于传感器噪声,也可能是不可预期的几何结构(激光光线几乎平行表面)可能使得维度标签错误地标为volumetric
解决这个问题的先决条件是获得噪声密度 或者 用section1的方法获得最小尺寸
2:在车载扫描上很容易产生某些角度点云采样稀疏,提高r_min使得邻域至少包含不同扫描线
3:PCA所需点数:相关数据只需要10个点即可运算;如果上面两个不构成约束,则下界直接与点密度关联。
上界的选择相对来说并不重要,可以直接使用场景中最大物体尺寸。在实践中3-4m就可以了。
尺度r我们在[rmin,rmax]之间采样16个值获得,由于通常结果半径都更为接近rmin,所以该十六个值得选取是以平方因子增加。
有两种半径选择方案:熵特征Ef 和 相似度指数Si。
1,先定义:点集Vrp的熵
Ef(Vrp) = -a1Dln(a1D)-a2Dln(a2D)-a3Dln(a3D)。
即如果熵越小,特征越是集中于其中一个维度上的特征。
由此获得的最优半径rEf定义为:
rEf = argmin(Ef(Vrp)) ;r∈[rmin,rmax]
即在(rmin,rmax)范围内使得特征最为集中的半径。
而集中在的维度即是维度标签 d*(Vrp,rEf)。
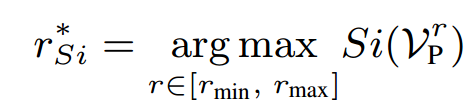
2,点集Vrp的相似度指数Si(Vrp)
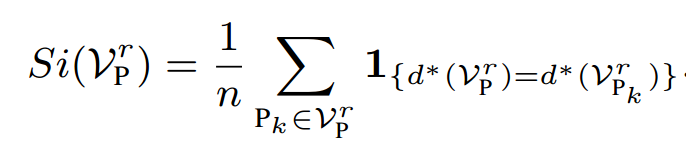
即点集Vrp中点特征在同一个维度上的比例,相当于点集属于同一个结构的比例。
两个半径选择标准Ef和Si都被测试了,并且半径选择结果有明显不同
并且前者优于后者。
附3:论文《Provably Good Moving Least Squares》简述
为了构建曲面,我们利用了moving least squares(MLS)算法,构建了一个隐函数I,其零解即目标曲。并且证明了只要点云满足ε-sampling,隐函数I是一个良好的距离函数(目标点距离目标曲面),同时其零解U几何近似于目标曲面F,且与F同态。
考虑在一个光滑闭合的表面F的点云S,且已知每个点的表面法向ni。
定义关于点si的函数
Psi(x)=(x-si)* ni
即,x距离si所在平面的距离(signed distance)
而隐函数I,是关于该函数在点云空间的权平均,定义如下:
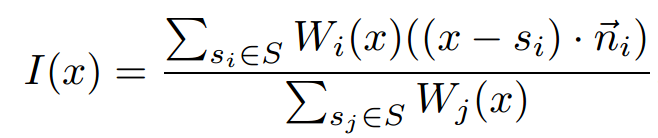
其中权值为:

其中 Ai是si邻域中点的数量。















 2544
2544











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









