






最近在研究摆线减速机,手算方程太麻烦,于是抄到了matlab里面
%以下参数手动输入
Rp=30; %针轮中心圆半径
t=35 ; %传动比
K1=0.6; %变幅系数(初取,依照短幅系数表)
delta=0.1 ; %偏置量,保证实体配合
rrp=2+delta ; %针齿半径 需要小于最小曲率且针径系数满足表格要求(针径系数表)
xr=0.15; %摆线轮齿宽系数 取0.1~0.2
%以下参数自动生成
Zc=t ; %摆线轮齿数
Zp=Zc+1 %针轮齿数
a=round(K1*Rp/Zp,1) %中心距
K1=a*Zp/Rp %变幅系数(反求)
rc=a*Zc %摆线轮节圆半径
rp=a*Zp %针轮节圆半径
rg=a/K1 %滚圆半径
rbc=rc/K1 %基圆半径
Pn=2*pi*a/K1 %啮合齿距
Pmin=Rp*sqrt((27*(1-K1^2)*Zc)/((Zc+2)^3)) %最小曲率半径
Pc=2*pi*(rp-rc) %节圆齿距
K2=Rp/rrp*sin(180/Zp/57.3) %针径系数
rac=Rp+a-rrp %摆线轮齿顶圆半径
rfc=Rp-a-rrp %摆线轮齿根圆半径
bc =xr*Rp %摆线轮宽度
x=[];
y=[];
for t=0:0.1:135
x(end+1)=(Rp-rrp*(1+K1^2-2*K1*cos(t))^(-1/2))*cos((1-Zp/Zc)*t) - (a-K1*rrp*(1+K1^2-2*K1*cos(t))^(-1/2))*cos(Zp/Zc*t);
y(end+1)=(Rp-rrp*(1+K1^2-2*K1*cos(t))^(-1/2))*sin((1-Zp/Zc)*t) + (a-K1*rrp*(1+K1^2-2*K1*cos(t))^(-1/2))*sin(Zp/Zc*t);
end
plot(x,y) 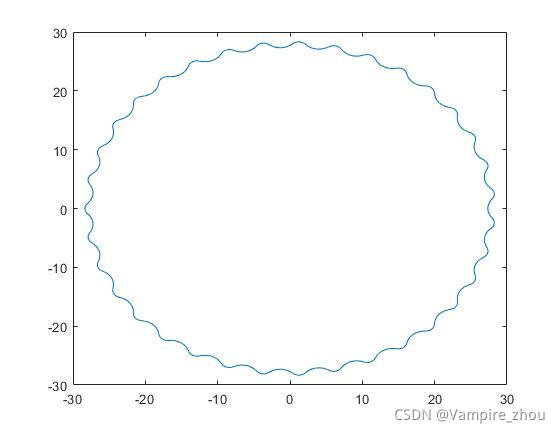


成功做出一个样机:
摆线针轮减速机


















 968
968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











