







A3C算法( Asynchronous Methods for Deep Reinforcement Learning)于2016年被谷歌DeepMind团队提出。A3C是一种非常有效的深度强化学习算法,在围棋、星际争霸等复杂任务上已经取得了很好的效果。接下来,我们先从A3C的名称入手,去解析这个算法。

A3C代表了异步优势动作评价(Asynchronous Advantage Actor Critic)
-
异步(Asynchronous):因为算法涉及并行执行一组环境。与DQN不同,DQN中单个神经网络代表的单个智能体与单个环境交互,而A3C利用上述多个化身来更有效地学习。在A3C中,有一个全局网络(global network)和多个工作智能体(worker),每个智能体都有自己的网络参数集。这些智能体中的每一个都与它自己的环境副本交互,同时其他智能体与它们的环境交互(并行训练)。这比单个智能体(除了加速完成更多工作)更好的原因在于,每个智能体的经验独立于其他智能体的经验。这样,可用于训练的整体经验多样化。
-
优势(Advantage):因为策略梯度的更新使用优势函数
-
动作评价(Actor Critic):因为这是一种动作评价(actor-critic)方法,它涉及一个在学得的状态值函数帮助下进行更新的策略 ∇ θ ′ log π ( a t ∣ s t ; θ ′ ) A ( s t , a t ; θ v ) A ( s t , a t ; θ v ) = ∑ i = 0 k − 1 γ i r t + i + γ k V ( s t + k ; θ v ) − V ( s t ; θ v ) \begin{gathered}\nabla_{\theta'}\log\pi(a_t|s_t;\theta')A(s_t,a_t;\theta_v)\\\\A(s_t,a_t;\theta_v)=\sum_{i=0}^{k-1}\gamma^ir_{t+i}+\gamma^kV(s_{t+k};\theta_v)-V(s_t;\theta_v)\end{gathered} ∇θ′logπ(at∣st;θ′)A(st,at;θv)A(st,at;θv)=i=0∑k−1γirt+i+γkV(st+k;θv)−V(st;θv)
- 可以用 k k k步的bootstrap进行更新。
下图是一个基于16个环境平行训练的图示说明。

A3C图示说明
- 16个并行环境
- θ \theta θ指的是策略的参数(actor), θ v \theta_v θv指的是值函数的参数(critic),两者梯度分别更新, α \alpha α和 α v \alpha_v αv则是相应的学习率。
- 该算法为了鼓励探索,在策略更新中加入了一个熵奖励正则化项(嵌入在 d θ d\theta dθ中)。
- 使用Hogwild!作为更新方法。Hogwild!是一种并行更新的方法,其中多个线程可能会同时更新共享参数。这种并行更新可能会导致线程间的冲突,但在这里作者认为这不会造成太大问题。
- 在计算策略的优势时,算法采用了前向视角(forward view)的n步回报,而不是后向视角(backward view)。前向视角与后向视角的区别在于如何计算多步的奖励。后向视角的计算需要用到资格迹(eligibility traces),详情参考Sutton的圣经。
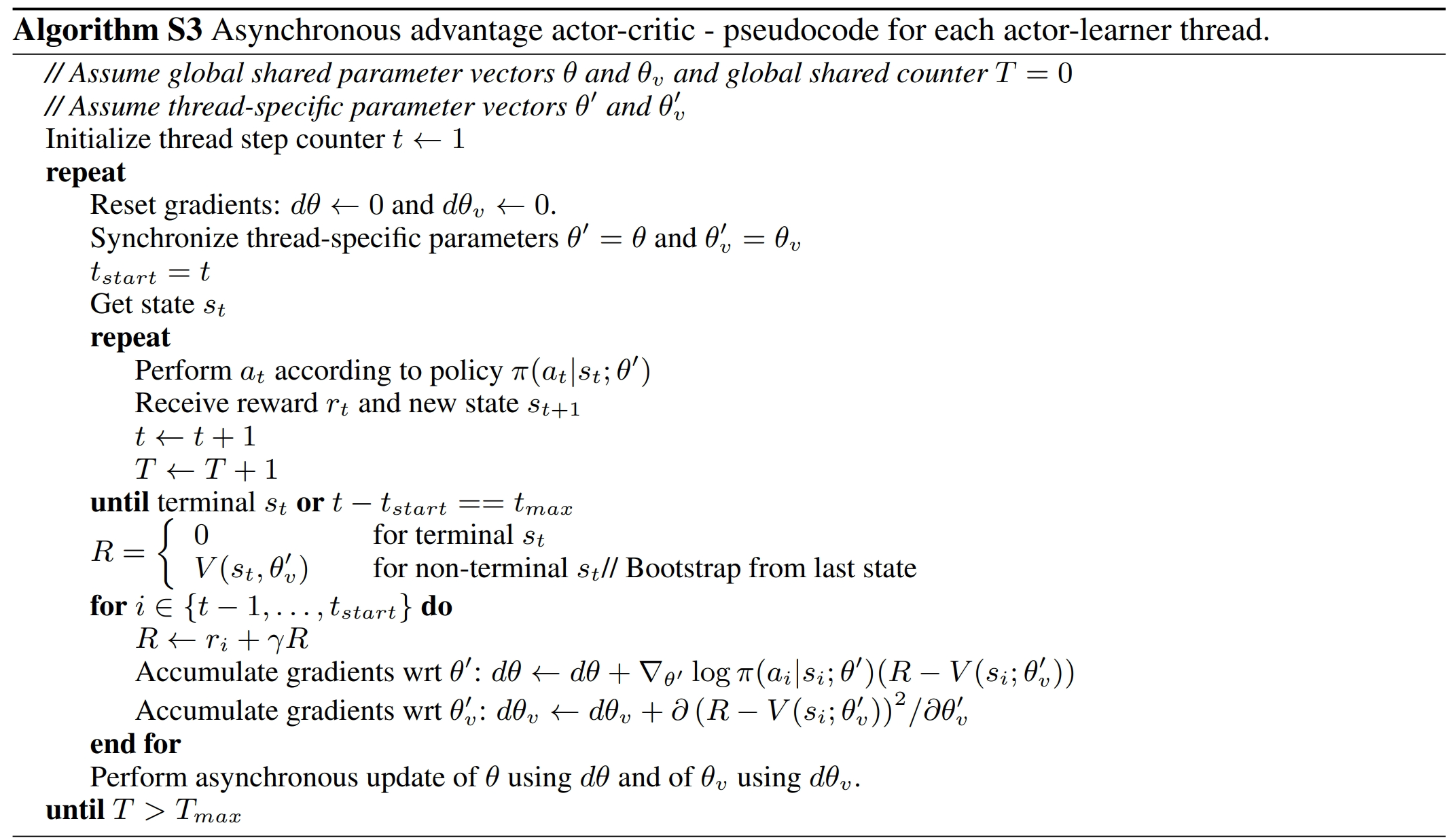
A3C算法伪代码
A3C算法实现

- 每个worker从global network复制参数
- 不同的worker与环境去做互动
- 不同的worker计算出各自的gradient
- 不同的worker把各自的gradient传回给global network
- global network接收到gradient后进行参数更新
Tensorflow版本代码
代码结构:
AC_Network这个类包含了创建网络本身的所有Tensorflow操作。Worker这个类包含了AC_Network的一个副本,一个环境类,以及与环境交互和更新全局网络的所有逻辑。- 用于建立
Worker实例并并行运行它们的高级代码。
Pytorch版本代码
参考了莫烦python——https://github.com/MorvanZhou/pytorch-A3C/tree/master
以及https://github.com/cyoon1729/Policy-Gradient-Methods/blob/master/a3c/a3c.py
- 莫烦python理想的结果如下所示

但在实际运行中出现下面两幅图的情况,reward达到峰值后迅速下降,猜测可能是worker学习到不好的策略,同步给global,使得原本好的策略持续变坏?


另一个版本的代码收敛较快,运行良好。也是利用交叉熵去作为正则化项的。
w0 | episode: 978 391.0
w5 | episode: 979 396.0
w3 | episode: 980 399.0
w7 | episode: 981 500.0
w4 | episode: 982 383.0
w1 | episode: 983 500.0
w6 | episode: 984 500.0
w2 | episode: 985 500.0
w0 | episode: 986 500.0
w5 | episode: 987 500.0
w3 | episode: 988 500.0
w4 | episode: 989 500.0
w7 | episode: 990 500.0
w1 | episode: 991 500.0
w6 | episode: 992 500.0
w2 | episode: 993 500.0
w0 | episode: 994 500.0
w5 | episode: 995 500.0
w3 | episode: 996 500.0
w7 | episode: 997 500.0
w4 | episode: 998 500.0
w1 | episode: 999 500.0
w6 | episode: 1000 500.0
代码:
import torch
import torch.nn.functional as F
import torch.multiprocessing as mp
import gymnasium as gym
import numpy as np
import util
from queue import Empty
GLOBAL_MAX_EPISODE = 1000
GAMMA = 0.98
class SharedAdam(torch.optim.Adam):
def __init__(self, params, lr=1e-3, betas=(0.9, 0.99), eps=1e-8,
weight_decay=0):
super(SharedAdam, self).__init__(params, lr=lr, betas=betas, eps=eps, weight_decay=weight_decay)
# State initialization
for group in self.param_groups:
for p in group['params']:
state = self.state[p]
state['step'] = 0
state['exp_avg'] = torch.zeros_like(p.data)
state['exp_avg_sq'] = torch.zeros_like(p.data)
# share in memory
state['exp_avg'].share_memory_()
state['exp_avg_sq'].share_memory_()
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
# 输入是某个状态,输出则是状态的价值。
class ValueNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim):
super(ValueNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
class A3Cagent:
def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr, env, numOfCPU):
# global network
self.global_actor = PolicyNet(state_dim, hidden_dim, action_dim)
self.global_critic = ValueNet(state_dim, hidden_dim)
# share the global parameters in multiprocessing
self.global_actor.share_memory()
self.global_critic.share_memory()
self.global_critic_optimizer = SharedAdam(self.global_critic.parameters(), lr=critic_lr, betas=(0.92, 0.999))
self.global_actor_optimizer = SharedAdam(self.global_actor.parameters(), lr=actor_lr, betas=(0.92, 0.999))
# self.global_critic_optimizer = torch.optim.Adam(self.global_critic.parameters(), lr=critic_lr)
# self.global_actor_optimizer = torch.optim.Adam(self.global_actor.parameters(), lr=actor_lr)
self.env = env
self.global_episode = mp.Value('i', 0)
self.global_episode_reward = mp.Value('d', 0.)
self.res_queue = mp.Queue()
# worker
self.workers = [Worker(i, self.global_actor, self.global_critic, self.global_critic_optimizer,
self.global_actor_optimizer, self.env, state_dim, hidden_dim, action_dim,
self.global_episode, self.global_episode_reward, self.res_queue) for i in range(numOfCPU)]
def train(self):
[w.start() for w in self.workers]
res = []
while True:
r = self.res_queue.get()
if r is not None:
res.append(r)
else:
break
[w.join() for w in self.workers]
class Worker(mp.Process):
def __init__(self, name, global_actor, global_critic, global_critic_optimizer, global_actor_optimizer,
env, state_dim, hidden_dim, action_dim, global_episode, global_episode_reward, res_queue):
super(Worker, self).__init__()
self.id = name
self.name = 'w%02i' % name
self.env = env
# self.env.seed(name)
self.global_episode = global_episode
self.global_episode_reward = global_episode_reward
self.res_queue = res_queue
self.global_actor = global_actor
self.global_critic = global_critic
self.global_critic_optimizer = global_critic_optimizer
self.global_actor_optimizer = global_actor_optimizer
self.local_actor = PolicyNet(state_dim, hidden_dim, action_dim)
self.local_critic = ValueNet(state_dim, hidden_dim)
# 根据动作概率分布随机采样
def take_action(self, state):
# state = torch.tensor(np.array([state]), dtype=torch.float)
state = torch.FloatTensor(state)
logits = self.local_actor(state)
dist = F.softmax(logits, dim=0)
probs = torch.distributions.Categorical(dist)
return probs.sample().detach().item()
def update(self, transition_dict):
states = torch.tensor(np.array(transition_dict['states']), dtype=torch.float)
actions = torch.tensor(transition_dict['actions']).view(-1, 1)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1, 1)
# next_states = torch.tensor(np.array(transition_dict['next_states']), dtype=torch.float)
# terminateds = torch.tensor(transition_dict['terminateds'], dtype=torch.float).view(-1, 1)
# truncateds = torch.tensor(transition_dict['truncateds'], dtype=torch.float).view(-1, 1)
# compute value target
discounted_rewards = [torch.sum(torch.FloatTensor([GAMMA**i for i in range(rewards[j:].size(0))]) \
* rewards[j:]) for j in range(rewards.size(0))] # sorry, not the most readable code.
value_targets = rewards.view(-1, 1) + torch.FloatTensor(discounted_rewards).view(-1, 1)
critic_loss = F.mse_loss(self.local_critic(states), value_targets.detach())
# compute policy loss with entropy bonus
logits = self.local_actor(states)
dists = F.softmax(logits, dim=1)
# assert not torch.any(torch.isnan(dists))
probs = torch.distributions.Categorical(dists)
# compute entropy bonus
entropy = []
for dist in dists:
entropy.append(-torch.sum(dist.mean() * torch.log(dist + 1e-8)))
entropy = torch.stack(entropy).sum()
advantage = value_targets - self.local_critic(states)
actor_loss = -probs.log_prob(actions.view(actions.size(0))).view(-1, 1) * advantage.detach()
actor_loss = actor_loss.mean() - entropy * 0.001
self.global_critic_optimizer.zero_grad()
critic_loss.backward()
# propagate local gradients to global parameters
for local_params, global_params in zip(self.local_critic.parameters(), self.global_critic.parameters()):
global_params._grad = local_params._grad
self.global_critic_optimizer.step()
self.global_actor_optimizer.zero_grad()
actor_loss.backward()
# propagate local gradients to global parameters
for local_params, global_params in zip(self.local_actor.parameters(), self.global_actor.parameters()):
global_params._grad = local_params._grad
self.global_actor_optimizer.step()
def sync_with_global(self):
self.local_critic.load_state_dict(self.global_critic.state_dict())
self.local_actor.load_state_dict(self.global_actor.state_dict())
def run(self):
while self.global_episode.value < GLOBAL_MAX_EPISODE:
state, _ = self.env.reset(seed=self.id)
# state = self.env.reset()
terminated = False
truncated = False
episodeReward = 0
transition_dict = {
'states': [],
'actions': [],
'next_states': [],
'rewards': [],
'terminateds': [],
'truncateds': []
}
while self.global_episode.value < GLOBAL_MAX_EPISODE:
action = self.take_action(state)
# next_state, reward, terminated, info = self.env.step(action)
next_state, reward, terminated, truncated, info = self.env.step(action)
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['terminateds'].append(terminated)
transition_dict['truncateds'].append(truncated)
episodeReward += reward
if terminated or truncated:
with self.global_episode.get_lock():
self.global_episode.value += 1
print(self.name + " | episode: " + str(self.global_episode.value) + " " + str(episodeReward))
self.res_queue.put(episodeReward)
self.update(transition_dict)
self.sync_with_global()
break
state = next_state
def test01():
env = gym.make("CartPole-v1")
agent = A3Cagent(state_dim=env.observation_space.shape[0],
hidden_dim=256,
action_dim=2,
actor_lr=1e-3,
critic_lr=1e-3,
env=env,
numOfCPU=8)
[w.start() for w in agent.workers]
returnLists1 = []
while True:
try:
r = agent.res_queue.get(timeout=3) # 设置3秒的超时
if r is not None:
returnLists1.append(r)
else:
break
except Empty: # 当队列中没有数据可供获取时,get方法会抛出Empty异常
print("No data in queue, breaking...")
break
[w.join() for w in agent.workers]
ReturnList = []
ReturnList.append(util.smooth([returnLists1], sm=50))
labelList = ['A3C']
util.PlotReward(len(returnLists1), ReturnList, labelList, 'CartPole-v1')
np.save("D:\LearningRL\Hands-on-RL\A3C_CartPole\ReturnData\A3C_v2_core8_4.npy", returnLists1)
env.close()

A3C的运行速度非常快。在实践中,我使用了两种的Adam优化器进行比较,不过好像差别不是很大。
参考
[1] 伯禹AI
[2] https://www.davidsilver.uk/teaching/
[3] 动手学强化学习
[4] Reinforcement Learning
[5] Asynchronous Methods for Deep Reinforcement Learning
[6] 第9章演员-评论员算法
[7] Simple Reinforcement Learning with Tensorflow Part 8: Asynchronous Actor-Critic Agents (A3C)
[8] Actor-Critic Methods: A3C and A2C
[9] https://mofanpy.com/tutorials/machine-learning/reinforcement-learning/intro-A3C


















 1713
1713

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











