







参考论文
Min Z, Wang J, Meng M Q H. Robust generalized point cloud registration with orientational data based on expectation maximization[J]. IEEE Transactions on Automation Science and Engineering, 2019, 17(1): 207-221.
思路
该论文提出一种杂交混合模型(hybird mixture model),使用高斯混合模型(GMM)和冯·米塞斯混合模型(von-Misis-Fisher model)分别表示点云位置和法向信息,进而对点云进行配准(registration)
复现
我使用matlab对论文进行了复现,全部代码如下:
主文件:demoHMM.m
%% load and generate data
datas = dlmread("./datas/bunnynormal.txt");
X = datas(:,1:3);
Xn = datas(:,4:6);
% rotate points and normal
angle2rotation = @(theta) [1 0 0;0 cos(theta) -sin(theta);0 sin(theta) cos(theta)] ...
*[cos(theta) 0 sin(theta);0 1 0;-sin(theta) 0 cos(theta)] ...
*[cos(theta) -sin(theta) 0;sin(theta) cos(theta) 0; 0 0 1];
theta = pi/20;
rMatrix = angle2rotation(theta);
Y = transpose(rMatrix * transpose(X)) + repmat([1 1 1],size(X,1),1);
Yn = transpose(rMatrix * transpose(Xn));
% plot
figure(1);
hold on;
scatter3(X(:,1),X(:,2),X(:,3));
scatter3(Y(:,1),Y(:,2),Y(:,3));
%% set initinal parameters
R = eye(3);
t = [0 0 0]';
k = 10; % von-Misis-Fisher模型参数
N = size(X,1);
M = size(Y,1);
sigma2 = 0;
for n = 1:N
pX = X(n,:);
for m =1:M
pY = Y(m,:);
sigma2 = sigma2+sum((pX-pY).^2);
end
end
sigma2 = sigma2/(3*M*N);
%% call HMM function
[~,~,~,~]=HMM(X',Xn',Y',Yn',R,t,k,sigma2);
函数文件:HMM.m
function [Y,Yn,R,t] = HMM(X,Xn,Y,Yn,R,t,k,sigma2)
% HMM: utilizing Hybird Mixture Model for registration of orientational
% data
% REFERENCE:Robust Generalized Point Cloud Registration With Orientational Data Based on Expectation Maximization
% INPUT PARAMETERS:
% X: fixed point cloud. Xn = [x1 x2 x3...xn]
% Xn: normals of fixed point cloud
% Y: movable point cloud
% Yn: normals of movable point cloud
% R: initial rotation matrix of Y and Yn
% t: initial translation vector of Y and Yn
% k: initial parameter of Von-Misis-Fisher distribution
% sigma2_: initial parameter of Gaussain distrubution
% OUTPUT PARAMETERS:
% Y: transformed point cloud
% Yn: transformed point cloud normals
% R: final rotation matrix
% t: final translation matrix
w = 0.3;% weight of uniform distribution
iter = 5;
N = size(X,2);
M = size(Y,2);
for i = 1:iter
%----------- E-step ----------%
g = k/(2*pi*(exp(k)-exp(-k))*power(2*pi*sigma2,1.5));
h = zeros(M,N);
for m = 1:M
for n = 1:N
h(m,n) = k*transpose(R*Yn(:,m))*Xn(:,n)-sum((X(:,n)-(R*Y(:,m)+t)).^2)/(2*sigma2);
h(m,n) = exp(h(m,n));
end
end
% calculate pmn
p = zeros(M,N);% posterior probability
for n = 1:N
sh = sum(h(:,n));
for m = 1:M
p(m,n) = (1-w)*(1/M)*g*h(m,n)/((1-w)*g*(1/M)*sh+w/N);
end
end
%----------- M-step ----------%
% M rigid step: calculate t and R
Np = sum(sum(p));
ux = [0 0 0]';
uy = [0 0 0]';
for n = 1:N
for m = 1:M
ux = ux + p(m,n)*X(:,n);
uy = uy + p(m,n)*Y(:,m);
end
end
ux = ux / Np;
uy = uy / Np;
t = ux - R*uy; % update t
% update R: 1.construct xn' and ym' 2.construct H1 and H2
% 3.SVD
Xnew = X - repmat(ux,1,N);
Ynew = Y - repmat(uy,1,M);
H1 = zeros(3);
H2 = zeros(3);
for n = 1:N
for m = 1:M
H1 = H1 + p(m,n)*Ynew(:,m)*Xnew(:,n)'./sigma2;
H2 = H2 + k*p(m,n)*Yn(:,m)*Xn(:,n)';
end
end
H = H1+H2;
[U,~,V] = svd(H);
R = V*diag([1 1 det(V*U')])*U'; % update R
% update point clouds
Y = R*Y + t;
Yn = R*Yn;
figure(2);
clf(2);
hold on;
text(0,0.25,num2str(i));
scatter3(X(1,:),X(2,:),X(3,:));
scatter3(Y(1,:),Y(2,:),Y(3,:));
hold off;
% M-var step
sigma2 = 0;
for n = 1:N
for m = 1:M
sigma2 = sigma2 + p(m,n)*sum((X(:,n)-(R*Y(:,m)+t)).^2);
end
end
sigma2 = sigma2./(3*Np);
% M-con step
k_new = 0;
for n = 1:N
for m = 1:M
k_new = p(m,n).*transpose(R*Yn(:,m))*Xn(:,n);
end
end
k_new = (exp(k)+exp(-k))/(exp(k)-exp(-k))-k_new/Np ;
k = 1/k_new;
end
end
实验效果
我使用bunny模型进行测试,在测试前需要计算点云法矢,代码运行效果如下图:

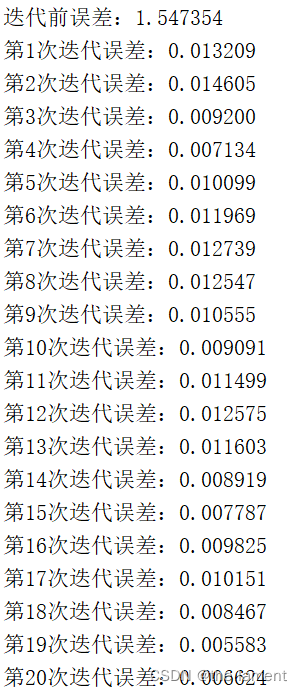
我使用均方根误差(RMSE)来对配准效果进行评价,误差随迭代变化关系如下图:
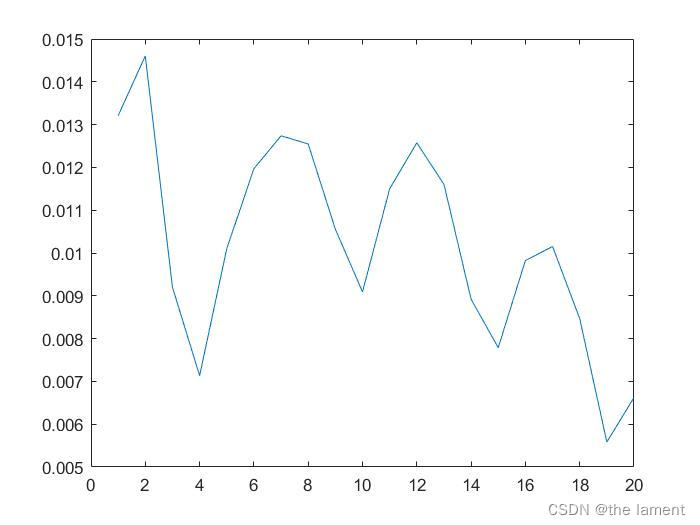
迭代过程中的误差具体数值为:
源代码下载地址:https://github.com/sulingjie/-registration














 2230
2230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









