







一、扩展卡尔曼滤波
KF和EKF的公式对比(基本没差别)
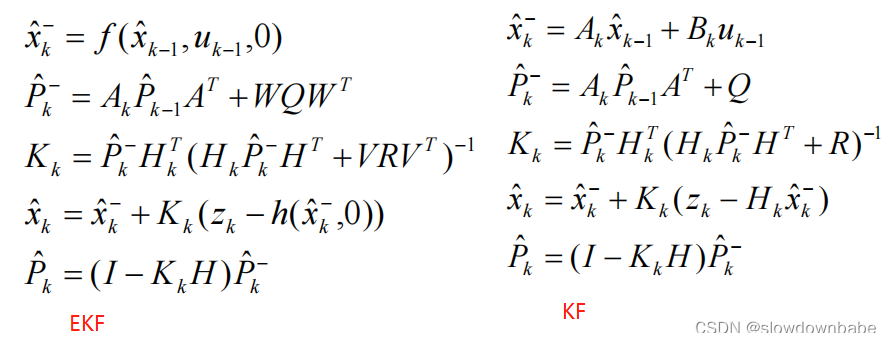
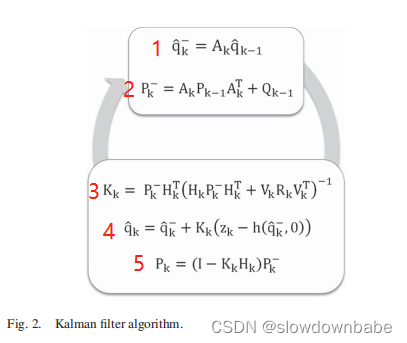
二、扩展卡尔曼五个公式
利用扩展卡尔曼滤波估计四元数。
下图是论文中的截图。可以和前面的卡尔曼滤波估计高度文章的那五个公式对应一下。
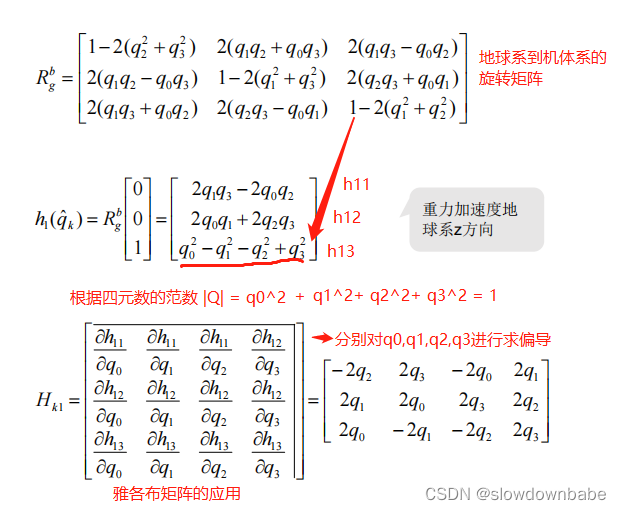
观测矩阵的确定。
三、代码的实现
1. 四元数模长归一化
static void NormalizeQuat(arm_matrix_instance_f32 *_q)
{
float norm = invSqrt(_q->pData[0] * _q->pData[0] + _q->pData[1] * _q->pData[1] + _q->pData[2]*_q->pData[2] + _q->pData[3]*_q->pData[3]);
// 归一化四元数
_q->pData[0] *= norm;
_q->pData[1] *= norm;
_q->pData[2] *= norm;
_q->pData[3] *= norm;
}
2. 快速开平方求导
// Fast inverse square-root
// See: http://en.wikipedia.org/wiki/Fast_inverse_square_root
float invSqrt(float x) /*快速开平方求倒*/
{
float halfx = 0.5f * x;
float y = x;
long i = *(long*)&y;
i = 0x5f3759df - (i>>1);
y = *(float*)&i;
y = y * (1.5f - (halfx * y * y));
return y;
}
3. EKF公式1,2
/*
* 卡尔曼公式1,2--计算先验的_q_(四元数)和_P_(误差协方差矩阵)
* 输入:机体角速度 w (rad/s), (3x1)
* 时间步长 dt (s)
* 上一次后验的四元数 _q (4x1)
* 上一次后验的协方差矩阵 _P (4x4):这里和加速度计有关
* 过程噪声协方差矩阵Q (4x4)
* 输出:先验状态,四元数 _q_ (4x1)
* 误差协方差矩阵的先验估计 _P_ (4x4)
*/
static void Km12(const Axis3f w, const float dt, const arm_matrix_instance_f32 _q, const arm_matrix_instance_f32 _P, const arm_matrix_instance_f32 _Q ,arm_matrix_instance_f32 _q_, arm_matrix_instance_f32 _P_)
{
float32_t A[16];
arm_matrix_instance_f32 _A;
float32_t A_T[16] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 矩阵A的转置
arm_matrix_instance_f32 _A_T;
float32_t T[16] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 临时定义中间变量
arm_matrix_instance_f32 _T;
float32_t T2[16] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 临时定义中间变量
arm_matrix_instance_f32 _T2;
float temp;
temp = dt / 2;
A[0] = 1.0f; A[1] = -w.x*temp; A[2] = -w.y*temp; A[3] = -w.z*temp;
A[4] = w.x*temp; A[5] = 1.0f; A[6] = w.z*temp; A[7] = -w.y*temp;
A[8] = w.y*temp; A[9] = -w.z*temp; A[10] = 1.0f; A[11] = w.x*temp;
A[12] = w.z*temp; A[13]= w.y*temp; A[14] = -w.x*temp; A[15] = 1.0f;
arm_mat_init_f32(&_A, 4, 4, A); // 转移矩阵A (4x4)
arm_mat_init_f32(&_A_T, 4, 4, A_T);
arm_mat_init_f32(&_T, 4, 4, T);
arm_mat_init_f32(&_T2, 4, 4, T2);
arm_mat_trans_f32(&_A, &_A_T); // A' (4x4)
arm_mat_mult_f32(&_A, &_P, &_T); // _T = _A*_P (4x4)
arm_mat_mult_f32(&_T, &_A_T, &_T2); // _T2_ = _T*_A_T (4x4)
arm_mat_add_f32(&_T2, &_Q, &_P_); // _P_ = _T2 + _Q = _A*_P*_A_T + _Q;误差协方差矩阵的先验估计公式
arm_mat_mult_f32(&_A, &_q, &_q_); // q_ = A*q (4x1) xk的先验估计,没有控制项
}
4. EKF公式3
/*
* 卡尔曼公式3--计算卡尔曼增益
* 输入:上一次估计四元数 _q (4x1)
* 先验的误差协方差矩阵 _P_ (4x4)
* 测量噪声协方差矩阵 _R (3x3)
* 输出:卡尔曼增益 _K (4x3)
*/
static void Km3(const arm_matrix_instance_f32 _q, const arm_matrix_instance_f32 _P_, const arm_matrix_instance_f32 _R, arm_matrix_instance_f32 _K)
{
float32_t H[12]; // (3x4)
float32_t H_T[12]; // (4x3)
float32_t T[12]; // (3x4)
float32_t T1[9]; // (3x3)
float32_t M[9]; // (3x3)
float32_t M_[9]; // M的逆, (3x3)
arm_matrix_instance_f32 _H;
arm_matrix_instance_f32 _H_T;
arm_matrix_instance_f32 _T;
arm_matrix_instance_f32 _T1;
arm_matrix_instance_f32 _M;
arm_matrix_instance_f32 _M_;
// 用加速度计进行修正时的观测矩阵
H[0] = -2*_q.pData[2]; H[1] = 2*_q.pData[3]; H[2] = -2*_q.pData[0]; H[3] = 2*_q.pData[1];
H[4] = 2*_q.pData[1]; H[5] = 2*_q.pData[0]; H[6] = 2*_q.pData[3]; H[7] = 2*_q.pData[2];
H[8] = 2*_q.pData[0]; H[9] = -2*_q.pData[1]; H[10] = -2*_q.pData[2]; H[11] = 2*_q.pData[3];
// 矩阵初始化
arm_mat_init_f32(&_H, 3, 4, H); // 观测矩阵H (3x4)
arm_mat_init_f32(&_H_T, 4, 3, H_T);
arm_mat_init_f32(&_T, 3, 4, T); // T (3x4)
arm_mat_init_f32(&_M, 3, 3, M); // M (3x3)
arm_mat_init_f32(&_M_, 3, 3, M_); // M_(3x3)
arm_mat_init_f32(&_T1, 3, 3, T1);
// 卡尔曼增益
arm_mat_mult_f32(&_H, &_P_, &_T); // _T = _H*_P_ (3x4)
arm_mat_trans_f32(&_H, &_H_T); // _H_T (4x3)
arm_mat_mult_f32(&_T, &_H_T, &_T1); // _T1 = _H*_P_*_H_T (3x3)
arm_mat_add_f32(&_T1, &_R, &_M); // _M = _H*_P_*_H_T + _R (3x3)
arm_mat_inverse_f32(&_M, &_M_); // _M_ = inv(_H*_P_*_H_T + R) (3x3)
arm_mat_init_f32(&_T, 4, 3, T); // 将T初始化为 4x3 矩阵
arm_mat_mult_f32(&_P_, &_H_T, &_T); // _T = _P_ * _H_T (4x3)
arm_mat_mult_f32(&_T, &_M_, &_K); // _K = _P_ * _H_T * inv(_H*_P_*_H_T + R); (4x3)
}
5. EKF公式4,5
/*
* 卡尔曼公式4,5
* 输入:观测的状态 a (加速度单位为 N/s^2) (3x1)
* 先验的四元数 _qi (4x1)
* 上一次估计的 _q
* 先验的噪声协方差矩阵 _P_
* 卡尔曼增益 _K (4x3)
* 输出:后验的四元数 _qo (4x1)
* 后验的噪声协方差矩阵 _P (4x4)
*/
static void Km45( const Axis3f a,
const arm_matrix_instance_f32 _qi,
const arm_matrix_instance_f32 _q,
const arm_matrix_instance_f32 _P_,
const arm_matrix_instance_f32 _K,
arm_matrix_instance_f32 _qo,
arm_matrix_instance_f32 _P)
{
float norm ; // 模长
float32_t z[3]; // 观测的向量
float32_t h[3]; // 地球系向量在机体系下的分量 (3x1)
float32_t v3[3]; // 临时向量 (3x1)
float32_t v4[4]; // 临时向量(4x1)
float32_t I[16]= {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 单位阵(4x4)
float32_t H[12];
float32_t T[16];
float32_t M[16];
arm_matrix_instance_f32 _z;
arm_matrix_instance_f32 _h;
arm_matrix_instance_f32 _v3;
arm_matrix_instance_f32 _v4;
arm_matrix_instance_f32 _I ;
arm_matrix_instance_f32 _H;
arm_matrix_instance_f32 _T;
arm_matrix_instance_f32 _M;
// 获取测量值
z[0] = a.x;
z[1] = a.y;
z[2] = a.z;
// 矩阵初始化
arm_mat_init_f32(&_z, 3, 1, z);
arm_mat_init_f32(&_h, 3, 1, h);
arm_mat_init_f32(&_v3, 3, 1, v3);
arm_mat_init_f32(&_v4, 4, 1, v4);
arm_mat_init_f32(&_I, 4, 4, I);
arm_mat_init_f32(&_H, 3, 4, H);
arm_mat_init_f32(&_T, 4, 4, T);
arm_mat_init_f32(&_M, 4, 4, M);
norm = invSqrt(a.x*a.x + a.y*a.y + a.z * a.z);
z[0] *= norm;
z[1] *= norm;
z[2] *= norm;
h[0] = 2*_q.pData[1]*_q.pData[3] - 2*_q.pData[0]*_q.pData[2];
h[1] = 2*_q.pData[0]*_q.pData[1] + 2*_q.pData[2]*_q.pData[3];
h[2] = _q.pData[0]*_q.pData[0] - _q.pData[1]*_q.pData[1] - _q.pData[2]*_q.pData[2] + _q.pData[3]*_q.pData[3];
// 观测矩阵
H[0] = -2*_q.pData[2]; H[1] = 2*_q.pData[3]; H[2] = -2*_q.pData[0]; H[3] = 2*_q.pData[1];
H[4] = 2*_q.pData[1]; H[5] = 2*_q.pData[0]; H[6] = 2*_q.pData[3]; H[7] = 2*_q.pData[2];
H[8] = 2*_q.pData[0]; H[9] = -2*_q.pData[1]; H[10] = -2*_q.pData[2]; H[11] = 2*_q.pData[3];
// 修正q
arm_mat_sub_f32(&_z, &_h, &_v3); // _v3 = _z - _h (3x1)
arm_mat_mult_f32(&_K, &_v3, &_v4); // _v4 = _K*(_z-_h) (4x1)
_v4.pData[3] = 0; // 加速度计修正,不改变 q3。
arm_mat_add_f32(&_qi, &_v4, &_qo); // _qo = _qi + _v4 (4x4)
// 修正P
arm_mat_mult_f32(&_K, &_H, &_T); // _T = _K*_H (4x4)
arm_mat_sub_f32(&_I, &_T, &_M); // _M = _I - _K*_H (4x4)
arm_mat_mult_f32(&_M, &_P_, &_P); // _P = (_I - _K*_H) * _P_
}
6. 应用扩展卡尔曼滤波进行6自由度的姿态解算
/*
* 卡尔曼滤波姿态估计
* 输入:六轴传感器数据 ,加速度 m/s^2, 加速度 rad/s,
* 此函数将更新全局变量 姿态四元数 quat_ 与 欧拉角 eular_
*/
void ekfdof6(Axis3f acc, Axis3f gyro, state_t *state , float dt)
{
float accBuf[3] = {0.f};
Axis3f tempacc = acc;
// 必须进行转换,否则微小的变动就会导致姿态变化很大。
gyro.x = gyro.x * DEG2RAD; /* 度转弧度 */
gyro.y = gyro.y * DEG2RAD;
gyro.z = gyro.z * DEG2RAD;
/* 卡尔曼滤波相关矩阵 */
static float32_t Q[16] = {1e-5f,0,0,0, 0,1e-5f,0,0, 0,0,1e-5f,0, 0,0,0,1e-5f}; // 过程噪声协方差矩阵 4X4
static float32_t R[9] = {1,0,0, 0,1,0, 0,0,1}; // 加速度计测量噪声协方差矩阵
static float32_t q[4] = {1, 0, 0, 0}; // 使用加速度计后验得到的协方差矩阵
static float32_t q_[4] = {1, 0, 0, 0}; // 先验的q
static float32_t P_[16] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 先验的误差协方差矩阵的值
static float32_t P1[16] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1}; // 通过加速度计后验得到的误差协方差矩阵
static float32_t K[12]; // 卡尔曼增益
/* 指向卡尔曼滤波相关矩阵的指针 */
static arm_matrix_instance_f32 _Q;
static arm_matrix_instance_f32 _R;
static arm_matrix_instance_f32 _q; // xk的后验估计
static arm_matrix_instance_f32 _q_; // xk的先验估计
static arm_matrix_instance_f32 _P_; // 误差协方差矩阵的先验估计
static arm_matrix_instance_f32 _P1;
static arm_matrix_instance_f32 _K;
static uint16_t km_atti_times = 0;
/* 初始化卡尔曼滤波相关矩阵 */
if (km_atti_times == 0)
{
arm_mat_init_f32(&_Q, 4, 4, Q);
arm_mat_init_f32(&_R, 3, 3, R);
arm_mat_init_f32(&_q, 4, 1, q);
arm_mat_init_f32(&_q_, 4, 1, q_);
arm_mat_init_f32(&_P_, 4, 4, P_);
arm_mat_init_f32(&_P1, 4, 4, P1);
arm_mat_init_f32(&_K, 4, 3, K);
km_atti_times = 1;
}
else if (km_atti_times < 1000) // 先信任加速度计,收敛快
{
Q[0] = 8e-3f;
Q[5] = 8e-3f;
Q[10] =8e-3f;
Q[15] = 8e-3f;
km_atti_times ++;
}
else // 后信任陀螺仪,准确
{
Q[0] = 1e-7f;
Q[5] = 1e-7f;
Q[10] = 1e-7f;
Q[15] = 1e-7f;
}
/* 卡尔曼滤波过程 */
Km12(gyro, dt, _q, _P1, _Q, _q_, _P_); // 卡尔曼公式1,2 根据陀螺仪预测
Km3(_q, _P_, _R, _K); // 卡尔曼公式3,计算卡尔曼增益
Km45(acc, _q_, _q, _P_, _K, _q, _P1); // 卡尔曼公式4,5 根据加速度修正
NormalizeQuat(&_q); // 四元数归一化
/* 赋值给全局变量 */
q0 = _q.pData[0];
q1 = _q.pData[1];
q2 = _q.pData[2];
q3 = _q.pData[3];
imuComputeRotationMatrix(); /*计算旋转矩阵*/
/*计算roll pitch yaw 欧拉角*/
state->attitude.pitch = -asinf(rMat[2][0]) * RAD2DEG;
state->attitude.roll = atan2f(rMat[2][1], rMat[2][2]) * RAD2DEG;
state->attitude.yaw = atan2f(rMat[1][0], rMat[0][0]) * RAD2DEG;
if (!isGravityCalibrated) /*未校准*/
{
accBuf[2] = tempacc.x* rMat[2][0] + tempacc.y * rMat[2][1] + tempacc.z * rMat[2][2];/*accz*/
calBaseAcc(accBuf); /*计算静态加速度*/
}
}
7. 计算旋转矩阵
/*计算旋转矩阵*/
void imuComputeRotationMatrix(void)
{
float q1q1 = q1 * q1;
float q2q2 = q2 * q2;
float q3q3 = q3 * q3;
float q0q1 = q0 * q1;
float q0q2 = q0 * q2;
float q0q3 = q0 * q3;
float q1q2 = q1 * q2;
float q1q3 = q1 * q3;
float q2q3 = q2 * q3;
rMat[0][0] = 1.0f - 2.0f * q2q2 - 2.0f * q3q3;
rMat[0][1] = 2.0f * (q1q2 + -q0q3);
rMat[0][2] = 2.0f * (q1q3 - -q0q2);
rMat[1][0] = 2.0f * (q1q2 - -q0q3);
rMat[1][1] = 1.0f - 2.0f * q1q1 - 2.0f * q3q3;
rMat[1][2] = 2.0f * (q2q3 + -q0q1);
rMat[2][0] = 2.0f * (q1q3 + -q0q2);
rMat[2][1] = 2.0f * (q2q3 - -q0q1);
rMat[2][2] = 1.0f - 2.0f * q1q1 - 2.0f * q2q2;
}
四、移植到MiniFly微型四轴中
6 , MiniFly V1.5\1,MiniFly Master\2,STM32F411\Firmware_F411 V1.4(改灯\FLIGHT\src\stabilizer.c
//四元数和欧拉角计算(250Hz)
if (RATE_DO_EXECUTE(ATTITUDE_ESTIMAT_RATE, tick))
{
// imuUpdate(sensorData.acc, sensorData.gyro, &state, ATTITUDE_ESTIMAT_DT);
ekfdof6(sensorData.acc, sensorData.gyro, &state, ATTITUDE_ESTIMAT_DT);
}
五、参考论文
A Double-Stage Kalman Filter for Orientation Tracking With an Integrated Processor in 9-D IMU














 360
360











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









