






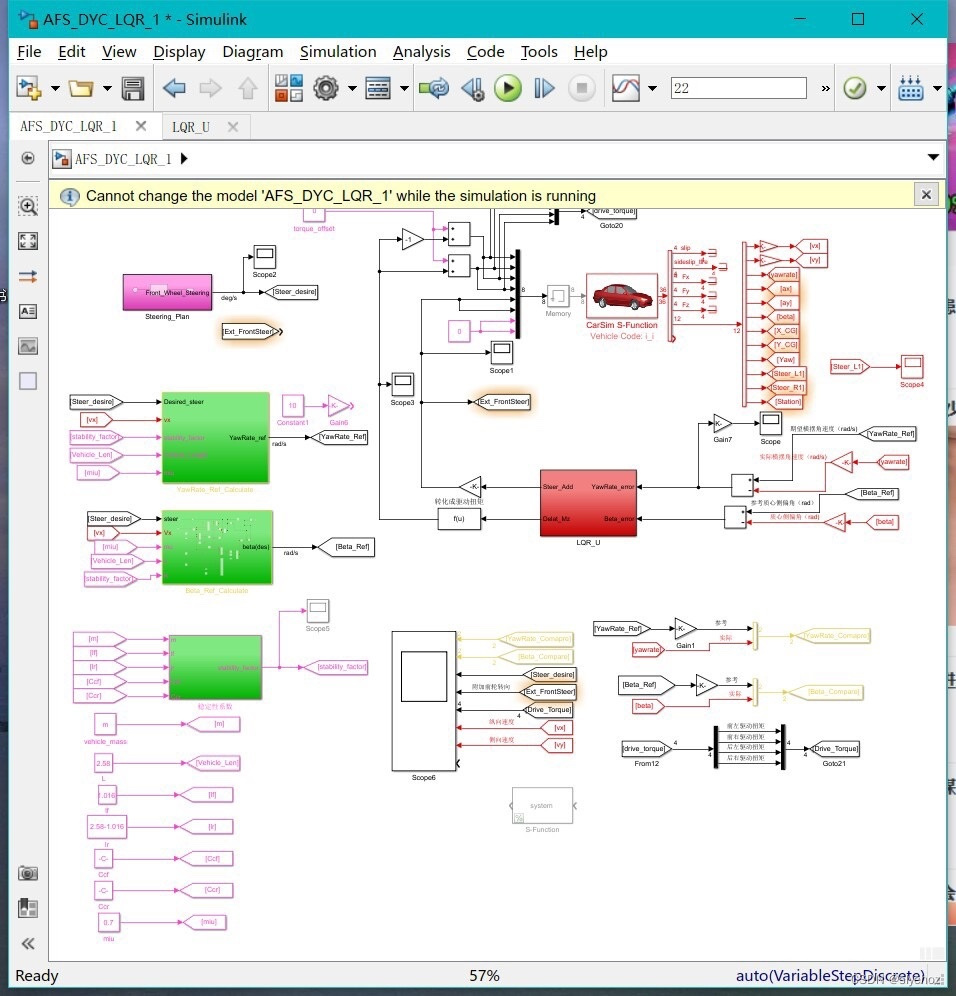
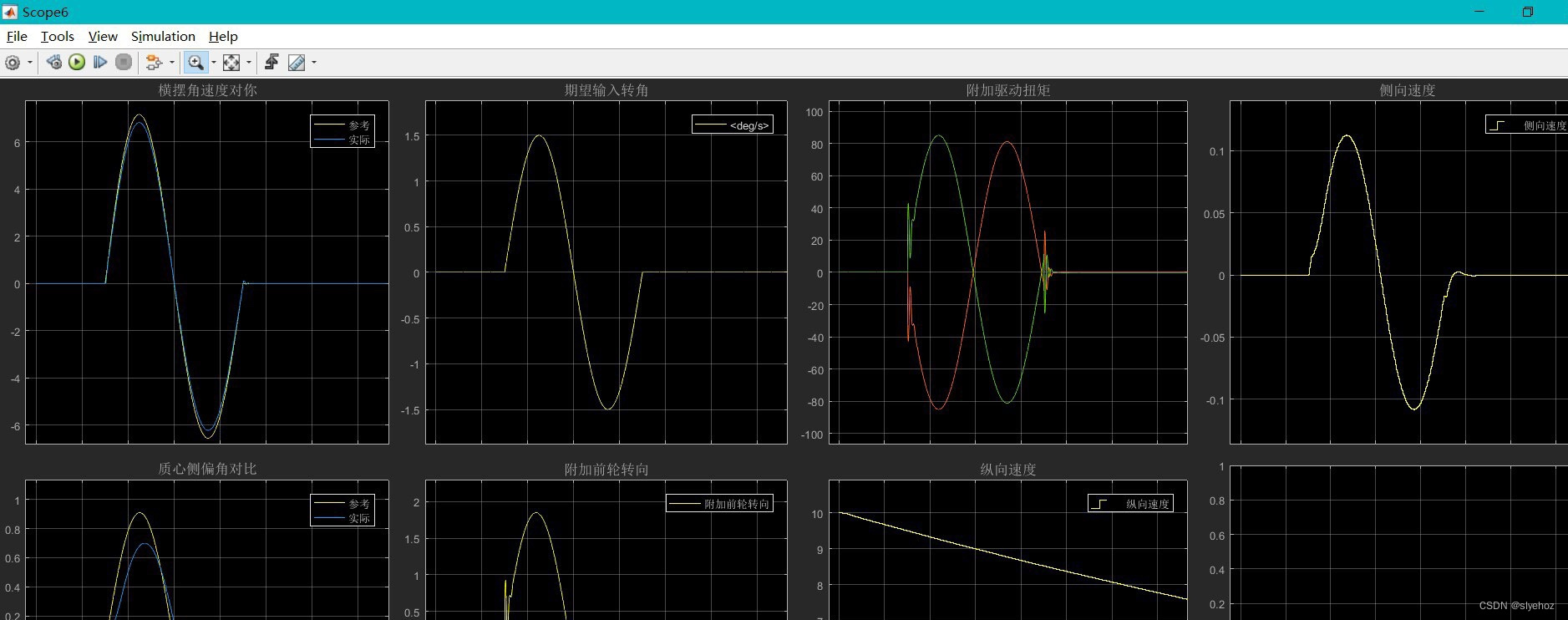
四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等
YID:92100682395427922
四轮独立驱动横摆角速度控制是现代汽车制造领域中的一个重要技术,它可以通过控制车辆横摆角速度来实现更加灵活的驾驶控制。LQR算法是一种广泛应用于现代控制系统中的优化算法,它可以通过对动态系统进行数学建模和优化求解来实现控制系统的优化。
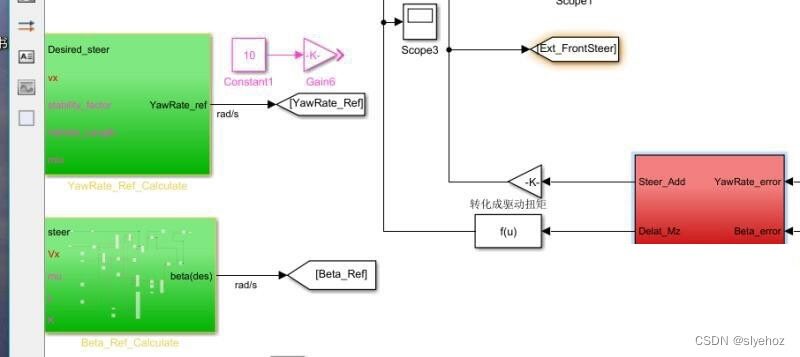
基于LQR算法的四轮独立驱动横摆角速度控制系统主要是基于二自由度动力学方程实现的。该方程可以通过对车辆的动力学特性进行建模得到,包括车辆的质心侧偏角、期望横摆角速度以及稳定性因素等。
为了实现更加准确和灵活的横摆角速度跟踪,该系统还使用了主动转向afs和直接横摆力矩dyc两种技术。通过这些技术,系统可以更好地控制车辆的横向运动,保证车辆行驶的稳定性和安全性。
在整个控制系统中,LQR模块是非常重要的一个组成部分,它可以根据车辆的动态特性和控制系统的需求进行优化,从而实现更加准确和高效的控制效果。作为LQR入门的重要算法,它可以为程序员提供详细的资料和说明,以及基本的模板和其他算法(如MPC和SMC)的对比分析。
总的来说,基于LQR算法的四轮独立驱动横摆角速度控制系统是一项高效、精准和安全的技术,它可以在现代汽车制造和控制领域中发挥重要作用。通过深入的研究和分析,程序员可以更好地理解和掌握该系统的实现原理和优化算法,进一步提高汽车制造和控制领域的技术水平和实践能力。















 322
322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









