







 本文详细介绍了如何使用MatLab 2019B对双目相机进行标定,包括图像采集、图像切割和实际标定步骤。通过标定,可获取相机的内外参数和畸变参数。在不同位置拍摄多张照片后,使用MatLab的stereoCameraCalibrator工具自动识别标定板点,完成标定。最后,导出标定参数以备后续使用。
本文详细介绍了如何使用MatLab 2019B对双目相机进行标定,包括图像采集、图像切割和实际标定步骤。通过标定,可获取相机的内外参数和畸变参数。在不同位置拍摄多张照片后,使用MatLab的stereoCameraCalibrator工具自动识别标定板点,完成标定。最后,导出标定参数以备后续使用。
内容提要:
双目相机标定目的:求出左、右相机的内、外参数矩阵以及畸变参数
使用软件:matlab 2019B
标定过程分三步走:
- 图像采集
- 图像分割
- matlab工具箱标定
第一步 图像采集
本实例采用的双目相机如下图所示:
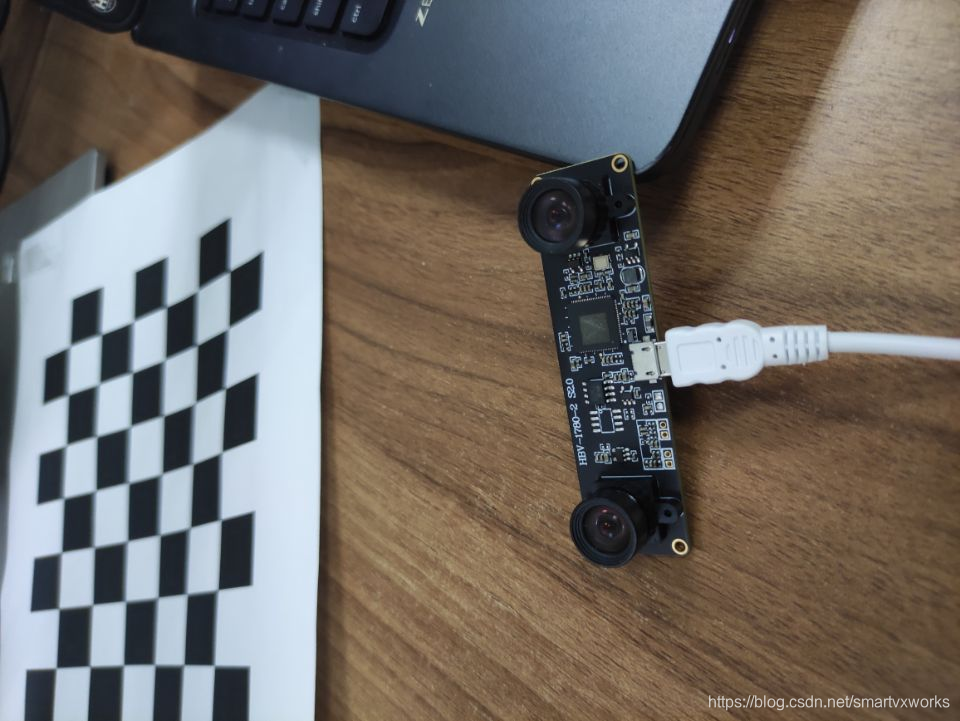
采集程序见HBV-1780-2 S2.0双目摄像头拍照,照片分割(基于QT+OpenCV)
打开采集程序,界面如下:

点击拍照按钮,双目相机进行拍照。

选择要保存的文件路径和照片名称,即可抓拍。为了保证标定效果,笔者建议将标定棋盘放在不同位置,抓拍十张以上照片。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 949
949

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











