







大语言模型(LLM)技术日益发展壮大,AI在自然语言处理领域的成就也十分显著。然而,实现机器人对复杂自然语言指令的精准理解和高效执行,一直是机器人技术领域的一大挑战。近期问世的SayCan方法,为这一难题提供了创新性的解决方案,成功架起了LLM与机器人操作规划之间的桥梁,堪称该领域的里程碑式成果。目前很多LLM应用到具身智能的工作都基于这篇“元老级”的SayCan方法,展现了其在该领域的深远影响。
阅前必读🌟
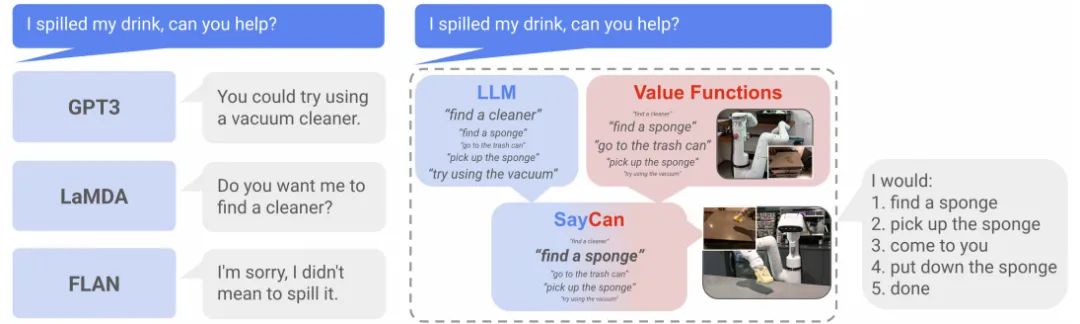
Do As I Can, Not As ISay: Grounding Language in Robotic Affordances.
1. SayCan:机器人操作规划领域的新纪元
SayCan以其开创性的方式,首次将LLM与机器人技能紧密结合,不仅推动了LLM在机器人操作规划中的应用,更为后续研究奠定了坚实的基础。与传统依赖固定规划算法的机器人系统不同,它巧妙融合了LLM的高级语言理解能力与机器人技能的物理执行能力,实现了从抽象语言指令到具体物理操作的无缝转换。
■1.1 SayCan的核心创新
●语言与技能的深度融合:SayCan利用类似GPT-3的LLM解析复杂的自然语言指令,生成可执行的操作计划。通过评估每个技能的有用性和潜在成功率,SayCan能够智能选择最优执行路径。
●多模态决策的精准性:该方法将LLM的语言理解与机器人操作的物理世界
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









