







ROS中提供了很多强大的功能,我们学习完前面的基本知识之后要继续进行深入。除了RviZ,还有一种叫 Stage simulator 也能模拟机器人motion
1、认识rviz
rviz是ROS中一款强大的3D可视化工具,这个玩意在后面可是要频繁用到的,是必须要弄明白的,详细的教程可以参考wiki:http://wiki.ros.org/rviz/UserGuide
我们可以在里面创建自己的机器人,并且让机器人动起来。还可以创建地图,显示3D点云等等,总之,想在ROS中显示的东东都可以在这里显示出来。当然这些显示都是通过消息的订阅来完成的,机器人通过ROS发布数据,rviz订阅消息接收数据,然后显示,这些数据也是有一定的数据格式的,可以参考下面的链接:
http://wiki.ros.org/rviz/DisplayTypes
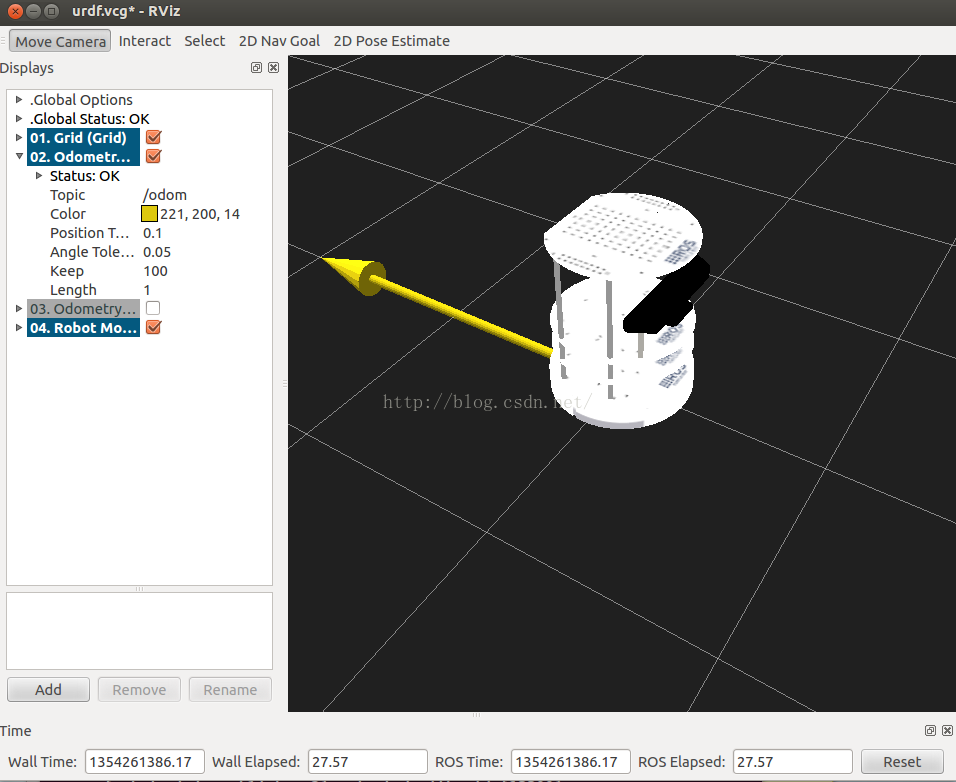
看到上面的机器人了吧,是不是很酷,在rviz中,这样的机器人模型是通过urdf文件描述的,具体urdf文件怎么写,参考wiki:
http://wiki.ros.org/urdf
================================
2. 开始RViz的学习
我是从这里开始:http://wiki.ros.org/rviz
在它之下,先玩这一部分:http://wiki.ros.org/rviz/UserGuide
3. RViz的安装和运行
目录
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









