






几乎所有的惯导系统分为两类:稳定平台惯导系统和捷联惯导系统。两个系统的区别在于陀螺仪和加速度计数据的参考坐标系之间的差异。
在稳定平台惯导系统中,稳定平台的轴坐标系是和global frame即全局坐标系统是一致的,而惯性测量单元就是安装在稳定平台上,陀螺仪可以检测到平台的旋转,然后这些旋转信号反馈到系统的转矩电机,转矩电机会旋转系统的平衡环以抵消掉这些的旋转,使得稳定平台和全局坐标系一致。

在稳定平台系统中,设备的方向信息可以直接从系统中读取,设备位置的计算需要对平台上的加速度计通过二次积分获得(注意,积分前需要从垂直方向上减掉重力加速度)。可以认为惯性测量的数据都是全局坐标系下的数据。
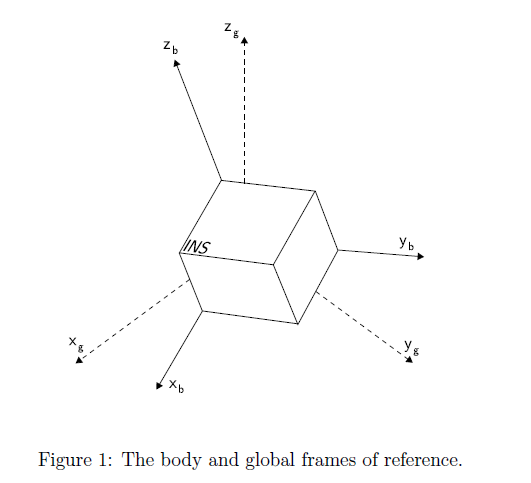
捷联惯导系统中,惯性测量单元刚性的安装在设备上,没有稳定平台之说了,因此惯性测量单元的测量数据都是在body frame或者说局部坐标系而不是在全局坐标系下。此时,设备的方向信息不能直接从陀螺仪来读了,而需要整合之前的方向信息。同样设备的位置信息也要将加速度数据通过整合后的方向信息转换到全局坐标系下再积分获得。
两个系统的算法如下图所示:
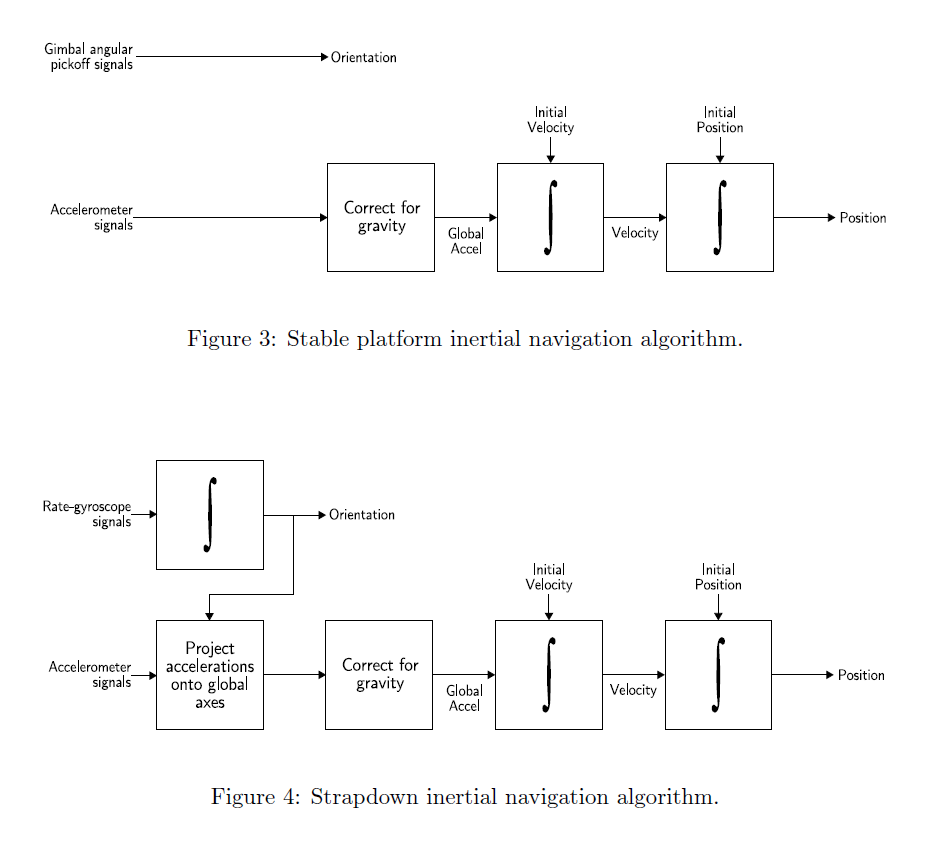
平台惯导系统的结构比较复杂,体积大,但计算简单,捷联系统简化了机械结构的复杂性,但是增加了计算复杂度,随着计算成本的降低,捷联系统越来越占据着主导地位。
本文参考《An introduction to inertial navigation》Oliver J. Woodman















 857
857

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









