







博主学习的步进电机是:28BYJ-48步进电动机
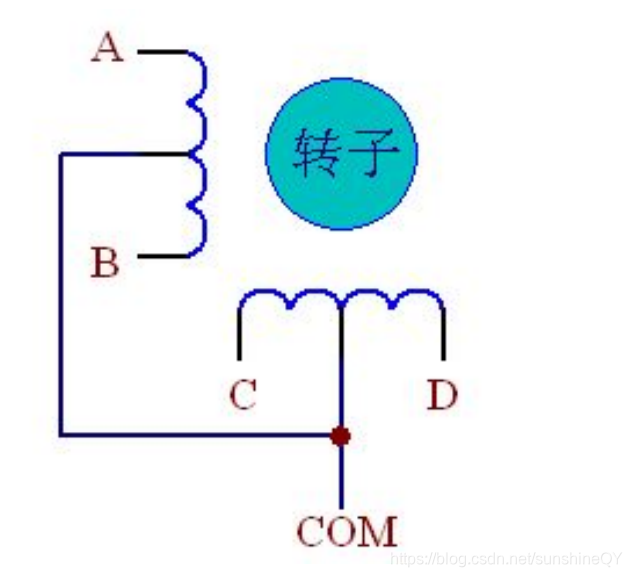
28BYJ-48步进电动机的步距角是5.625度,也就是说每个脉冲转5.625度,而360/5.625=64,所以64个脉冲转一圈,但这是指电机的转子,而转子到输出轴有齿轮减速器连接,减速比为64,那么转子转64圈,输出轴转一圈,所以结论是64*64=4096个脉冲才能使输出轴转一圈,该步进电机为四相五线,如下图所示:

步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数(PWM通过占空比来改变高低电变换,改变了输出的频率从而改变转速),而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1562
1562

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









