







计算关键点
clock_t start = clock();
// 计算关键点
pcl::ISSKeypoint3D<pcl::PointXYZ, pcl::PointXYZ> iss_det;
pcl::search::KdTree<pcl::PointXYZ>::Ptr model_tree(new pcl::search::KdTree<pcl::PointXYZ>());
pcl::search::KdTree<pcl::PointXYZ>::Ptr scene_tree(new pcl::search::KdTree<pcl::PointXYZ>());
// 计算分辨率
double model_resolution = computeCloudResolution(model);
cout<<"model_resolution: "<<model_resolution<<endl;
double scene_resolution = computeCloudResolution(scene);
cout<<"model_resolution: "<<scene_resolution<<endl;
//iss公共参数设置
iss_det.setMinNeighbors(5);
iss_det.setThreshold21(0.975);
iss_det.setThreshold32(0.975);
iss_det.setNumberOfThreads(4);
// 计算model关键点
iss_det.setInputCloud(model);
iss_det.setSearchMethod(model_tree);
iss_det.setSalientRadius(6*model_resolution); // 0.5
iss_det.setNonMaxRadius(4*model_resolution);
iss_det.compute(*model_keypoint);
// 计算scene关键点
iss_det.setInputCloud(scene);
iss_det.setSearchMethod(scene_tree);
iss_det.setSalientRadius(6*scene_resolution); // 0.5
iss_det.setNonMaxRadius(4*scene_resolution);
iss_det.compute(*scene_keypoint);
clock_t end = clock();
cout << "iss关键点提取时间:" << (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout << "model_iss关键点数量" << model_keypoint->size() << endl;
cout << "scene_iss关键点数量" << scene_keypoint->size() << endl;
计算关键点处的特征描述
// 计算fpfh特征
// input: keypoints ,cloud , normals
// output: FPFH descriptors
void
compute_fpfh(pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints, pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,pcl::PointCloud<pcl::Normal>::Ptr normals,pcl::PointCloud<pcl::FPFHSignature33>::Ptr descriptors)
{
clock_t start = clock();
// FPFH estimation object.
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ> );
fpfh.setInputCloud(keypoints); // 计算keypoints处的特征
fpfh.setInputNormals(normals); // cloud的法线
fpfh.setSearchSurface(cloud); // 计算的平面是cloud 而不是keypoints
fpfh.setSearchMethod(kdtree);
// Search radius, to look for neighbors. Note: the value given here has to be
// larger than the radius used to estimate the normals.
fpfh.setRadiusSearch(2.0);
fpfh.compute(*descriptors);
clock_t end = clock();
cout<<"Time fpfh: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"Get fpfh: "<<descriptors->points.size()<<endl;
}
建立匹配关系
估计位姿(配准)
可视化
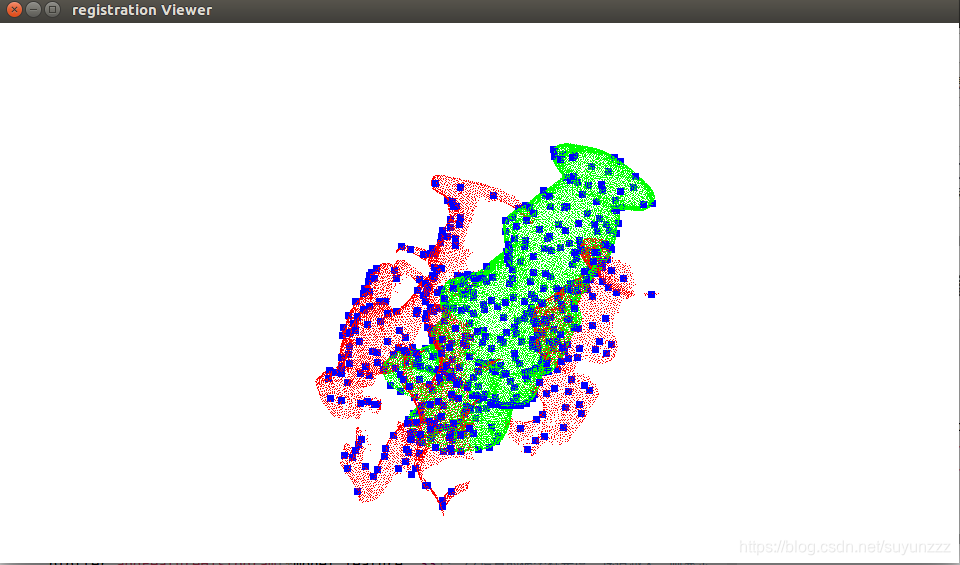
可视化关键点
//点云可视化
// 显示model+scene以及他们的keypoints
void
visualize_pcd(PointCloud::Ptr model, PointCloud::Ptr model_keypoints,PointCloud::Ptr scene, PointCloud::Ptr scene_keypoints)
{
pcl::visualization::PCLVisualizer viewer("registration Viewer");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_color(model, 0, 255, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_color(scene, 255, 0, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_keypoint_color(model_keypoints, 0, 0, 255);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_keypoint_color(scene_keypoints, 0, 0, 255);
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(model, model_color, "model");
viewer.addPointCloud(scene, scene_color, "scene");
viewer.addPointCloud(model_keypoints, model_keypoint_color, "model_keypoints");
viewer.addPointCloud(scene_keypoints, scene_keypoint_color, "scene_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "model_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "scene_keypoints");
while(!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
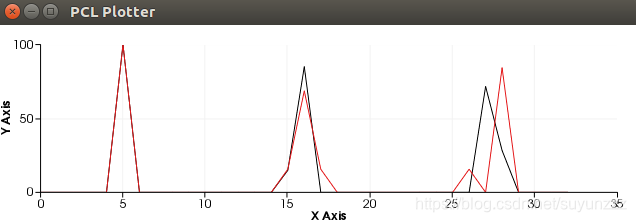
可视化特征直方图
// 可视化直方图
void
visualize_Histogram( pcl::PointCloud<pcl::FPFHSignature33>::Ptr model_feature, pcl::PointCloud<pcl::FPFHSignature33>::Ptr scene_feature)
{
pcl::visualization::PCLPlotter plotter;
plotter.addFeatureHistogram(*model_feature, 33); //设置的很坐标长度,该值越大,则显示的越细致
plotter.addFeatureHistogram(*scene_feature, 33); //设置的很坐标长度,该值越大,则显示的越细致
plotter.plot();
}
可视化对应关系
// 可视化对应关系
viewer.addCorrespondences<pcl::PointXYZ>(model_keypoints,scene_keypoints,*model_scene_corrs);
参考
PCL/OpenNI tutorial 4: 3D object recognition (descriptors)
PCL/OpenNI tutorial 5: 3D object recognition (pipeline)
PCL学习:基于点云分类的目标识别
全部代码
/* 目标:对输入的model,scene计算.匹配关系,并估计位姿
* 下采样->计算关键点(iss)->计算特征(fpfh)
* 可视化点云以及关键点,并可视化其特征直方图
*/
#include <pcl/registration/ia_ransac.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/fpfh.h>
#include <pcl/features/pfh.h>
#include <pcl/features/shot_omp.h>
#include <pcl/search/kdtree.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/filter.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/registration/icp.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <time.h>
#include <iostream>
#include <pcl/keypoints/iss_3d.h>
#include <cstdlib>
#include <pcl/visualization/pcl_plotter.h>// 直方图的可视化 方法2
#include <pcl/registration/sample_consensus_prerejective.h> // pose estimate
#include <pcl/keypoints/sift_keypoint.h> // shift关键点相关
#include <pcl/pcl_macros.h>
using pcl::NormalEstimation;
using pcl::search::KdTree;
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloud;
typedef pcl::PointXYZ PointType;
typedef pcl::Normal NormalType;
typedef pcl::SHOT352 DescriptorType;
float descr_rad_ (3.0f); // shot描述子的搜索半径
// sift相关
namespace pcl
{
template<>
struct SIFTKeypointFieldSelector<PointXYZ>
{
inline float
operator () (const PointXYZ &p) const
{
return p.z;
}
};
}
double
computeCloudResolution(const pcl::PointCloud<pcl::PointXYZ>::ConstPtr& cloud)
{
double resolution = 0.0;
int numberOfPoints = 0;
int nres;
std::vector<int> indices(2);
std::vector<float> squaredDistances(2);
pcl::search::KdTree<pcl::PointXYZ> tree;
tree.setInputCloud(cloud);
for (size_t i = 0; i < cloud->size(); ++i)
{
if (! pcl_isfinite((*cloud)[i].x))
continue;
// Considering the second neighbor since the first is the point itself.
nres = tree.nearestKSearch(i, 2, indices, squaredDistances);
if (nres == 2)
{
resolution += sqrt(squaredDistances[1]);
++numberOfPoints;
}
}
if (numberOfPoints != 0)
resolution /= numberOfPoints;
return resolution;
}
// 计算shift特征
void
compute_shift(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints)
{
clock_t start = clock();
const float min_scale = 1; //设置尺度空间中最小尺度的标准偏差
const int n_octaves = 3; //设置高斯金字塔组(octave)的数目
const int n_scales_per_octave =1; //设置每组(octave)计算的尺度
const float min_contrast = 0.02; //设置限制关键点检测的阈值
pcl::SIFTKeypoint<pcl::PointXYZ, pcl::PointWithScale> sift;//创建sift关键点检测对象
pcl::PointCloud<pcl::PointWithScale> result;
sift.setInputCloud(cloud);//设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
sift.setSearchMethod(tree);//创建一个空的kd树对象tree,并把它传递给sift检测对象
sift.setScales(min_scale, n_octaves, n_scales_per_octave);//指定搜索关键点的尺度范围
sift.setMinimumContrast(min_contrast);//设置限制关键点检测的阈值
sift.compute(result);//执行sift关键点检测,保存结果在result
copyPointCloud(result, *keypoints);//将点类型pcl::PointWithScale的数据转换为点类型pcl::PointXYZ的数据
clock_t end = clock();
cout << "sift关键点提取时间:" << (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout << "sift关键点数量" << keypoints->size() << endl;
}
// 计算iss特征
void
compute_iss(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints)
{
clock_t start = clock();
// 计算关键点
pcl::ISSKeypoint3D<pcl::PointXYZ, pcl::PointXYZ> iss_det;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
// 计算分辨率
double model_resolution = computeCloudResolution(cloud);
cout<<"resolution: "<<model_resolution<<endl;
//iss公共参数设置
iss_det.setMinNeighbors(10);
iss_det.setThreshold21(0.975);
iss_det.setThreshold32(0.975);
iss_det.setNumberOfThreads(4);
// 计算model关键点
iss_det.setInputCloud(cloud);
iss_det.setSearchMethod(tree);
iss_det.setSalientRadius(6*model_resolution); // 0.5
iss_det.setNonMaxRadius(4*model_resolution);
iss_det.compute(*keypoints);
clock_t end = clock();
cout << "iss关键点提取时间:" << (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout << "iss关键点数量" << keypoints->size() << endl;
}
// 估计法线
// input:cloud
// output:normals
void
est_normals(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in,pcl::PointCloud<pcl::Normal>::Ptr normals)
{
pcl::NormalEstimationOMP<PointType, NormalType> norm_est;
norm_est.setNumberOfThreads(4); //手动设置线程数
norm_est.setKSearch (10); //设置k邻域搜索阈值为10个点
norm_est.setInputCloud (cloud_in); //设置输入模型点云
norm_est.compute (*normals);//计算点云法线
}
// 计算fpfh特征
// input: keypoints ,cloud , normals
// output: FPFH descriptors
void
compute_fpfh(pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints, pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::Normal>::Ptr normals,pcl::PointCloud<pcl::FPFHSignature33>::Ptr descriptors)
{
clock_t start = clock();
// FPFH estimation object.
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ> );
fpfh.setInputCloud(keypoints); // 计算keypoints处的特征
fpfh.setInputNormals(normals); // cloud的法线
fpfh.setSearchSurface(cloud); // 计算的平面是cloud 而不是keypoints
fpfh.setSearchMethod(kdtree);
// Search radius, to look for neighbors. Note: the value given here has to be
// larger than the radius used to estimate the normals.
fpfh.setRadiusSearch(2.0);
fpfh.compute(*descriptors);
clock_t end = clock();
cout<<"Time fpfh: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"Get fpfh: "<<descriptors->points.size()<<endl;
}
// 计算pfh特征
// input: keypoints ,cloud , normals
// output: FPFH descriptors
void
compute_pfh(pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints, pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::Normal>::Ptr normals,pcl::PointCloud<pcl::PFHSignature125>::Ptr descriptors)
{
clock_t start = clock();
// FPFH estimation object.
pcl::PFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::PFHSignature125> pfh;
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ> );
pfh.setInputCloud(keypoints); // 计算keypoints处的特征
pfh.setInputNormals(normals); // cloud的法线
pfh.setSearchSurface(cloud); // 计算的平面是cloud 而不是keypoints
pfh.setSearchMethod(kdtree);
// Search radius, to look for neighbors. Note: the value given here has to be
// larger than the radius used to estimate the normals.
pfh.setRadiusSearch(0.5);
pfh.compute(*descriptors);
clock_t end = clock();
cout<<"Time pfh: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"Get pfh: "<<descriptors->points.size()<<endl;
}
// 计算SHOT特征
// input:model_keypoint/scene_keypoint, model/scene, model_normals/scene_noemals
// outut:model_shot/scene_shot
void
compute_shot(pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints, pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::Normal>::Ptr normals,pcl::PointCloud<pcl::SHOT352>::Ptr descriptors)
{
clock_t start=clock();
pcl::SHOTEstimationOMP<PointType, NormalType, DescriptorType> descr_est;
descr_est.setNumberOfThreads(4); // 设置线程数 默认为0
descr_est.setRadiusSearch (descr_rad_); //设置搜索半径
descr_est.setInputCloud (keypoints); //模型点云的关键点
descr_est.setInputNormals (normals); //模型点云的法线
descr_est.setSearchSurface (cloud); //模型点云
descr_est.compute(*descriptors); // 计算,保存
clock_t end=clock();
cout<<"Time SHOT: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"Get SHOT: "<<descriptors->points.size()<<endl;
}
// fpfh match
// input: modelDescriptors,sceneDescriptors
// output: pcl::CorrespondencesPtr
void
find_match(pcl::PointCloud<pcl::FPFHSignature33>::Ptr model_descriptors,pcl::PointCloud<pcl::FPFHSignature33>::Ptr scene_descriptors,pcl::CorrespondencesPtr model_scene_corrs)
{
clock_t start = clock();
pcl::KdTreeFLANN<pcl::FPFHSignature33> matching;
matching.setInputCloud(model_descriptors);
for (size_t i = 0; i < scene_descriptors->size(); ++i)
{
std::vector<int> neighbors(1);
std::vector<float> squaredDistances(1);
// Ignore NaNs.
if (pcl_isfinite(scene_descriptors->at(i).histogram[0] ))
{
// Find the nearest neighbor (in descriptor space)...
int neighborCount = matching.nearestKSearch(scene_descriptors->at(i), 1, neighbors, squaredDistances);
// ...and add a new correspondence if the distance is less than a threshold
// (SHOT distances are between 0 and 1, other descriptors use different metrics).
if (neighborCount == 1 && squaredDistances[0] < 0.1f)
{
pcl::Correspondence correspondence(neighbors[0], static_cast<int>(i), squaredDistances[0]);
model_scene_corrs->push_back(correspondence);
cout<<"( "<<correspondence.index_query<<","<<correspondence.index_match<<" )"<<endl;
}
}
}
std::cout << "Found " << model_scene_corrs->size() << " correspondences." << std::endl;
clock_t end = clock();
cout<<"Time match: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"-----------------------------"<<endl;
}
// shot match
// input: modelDescriptors,sceneDescriptors
// output: pcl::CorrespondencesPtr
void
find_match_shot(pcl::PointCloud<pcl::SHOT352>::Ptr model_descriptors,pcl::PointCloud<pcl::SHOT352>::Ptr scene_descriptors,
pcl::CorrespondencesPtr model_scene_corrs)
{
clock_t start = clock();
pcl::KdTreeFLANN<pcl::SHOT352> matching;
matching.setInputCloud(model_descriptors);
for (size_t i = 0; i < scene_descriptors->size(); ++i)
{
std::vector<int> neighbors(1);
std::vector<float> squaredDistances(1);
// Ignore NaNs.
if (pcl_isfinite(scene_descriptors->at(i).descriptor[0] ))
{
// Find the nearest neighbor (in descriptor space)...
int neighborCount = matching.nearestKSearch(scene_descriptors->at(i), 1, neighbors, squaredDistances);
// ...and add a new correspondence if the distance is less than a threshold
// (SHOT distances are between 0 and 1, other descriptors use different metrics).
if (neighborCount == 1 && squaredDistances[0] < 0.05f)
{
pcl::Correspondence correspondence(neighbors[0], static_cast<int>(i), squaredDistances[0]);
model_scene_corrs->push_back(correspondence);
// cout<<"( "<<correspondence.index_query<<","<<correspondence.index_match<<" )"<<endl; // 打印对应点对
}
}
}
std::cout << "Found " << model_scene_corrs->size() << " correspondences." << std::endl;
clock_t end = clock();
cout<<"Time match: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"-----------------------------"<<endl;
}
// pfh match
// input: modelDescriptors,sceneDescriptors
// output: pcl::CorrespondencesPtr
void
find_match_pfh(pcl::PointCloud<pcl::PFHSignature125>::Ptr model_descriptors,pcl::PointCloud<pcl::PFHSignature125>::Ptr scene_descriptors,
pcl::CorrespondencesPtr model_scene_corrs)
{
clock_t start = clock();
pcl::KdTreeFLANN<pcl::PFHSignature125> matching;
matching.setInputCloud(model_descriptors);
for (size_t i = 0; i < scene_descriptors->size(); ++i)
{
std::vector<int> neighbors(1);
std::vector<float> squaredDistances(1);
// Ignore NaNs.
if (pcl_isfinite(scene_descriptors->at(i).histogram[0] ))
{
// Find the nearest neighbor (in descriptor space)...
int neighborCount = matching.nearestKSearch(scene_descriptors->at(i), 1, neighbors, squaredDistances);
// ...and add a new correspondence if the distance is less than a threshold
// (SHOT distances are between 0 and 1, other descriptors use different metrics).
if (neighborCount == 1 && squaredDistances[0] < 0.1f)
{
pcl::Correspondence correspondence(neighbors[0], static_cast<int>(i), squaredDistances[0]);
model_scene_corrs->push_back(correspondence);
// cout<<"( "<<correspondence.index_query<<","<<correspondence.index_match<<" )"<<endl; // 打印对应点对
}
}
}
std::cout << "Found " << model_scene_corrs->size() << " correspondences." << std::endl;
clock_t end = clock();
cout<<"Time match: "<< (double)(end - start) / CLOCKS_PER_SEC <<endl;
cout<<"-----------------------------"<<endl;
}
// 位姿估计
// input: model,scene,model_descriptors,scene_descriptors
// output: R,t
void
estimationPose(pcl::PointCloud<pcl::PointXYZ>::Ptr model,pcl::PointCloud<pcl::PointXYZ>::Ptr scene,
pcl::PointCloud<pcl::PFHSignature125>::Ptr model_descriptors,pcl::PointCloud<pcl::PFHSignature125>::Ptr scene_descriptors,
pcl::PointCloud<pcl::PointXYZ>::Ptr alignedModel)
{
// Object for pose estimation.
pcl::SampleConsensusPrerejective<pcl::PointXYZ, pcl::PointXYZ, pcl::PFHSignature125> pose;
pose.setInputSource(model);
pose.setInputTarget(scene);
pose.setSourceFeatures(model_descriptors);
pose.setTargetFeatures(scene_descriptors);
// Instead of matching a descriptor with its nearest neighbor, choose randomly between
// the N closest ones, making it more robust to outliers, but increasing time.
pose.setCorrespondenceRandomness(5); // 匹配最近的5个描述子
// Set the fraction (0-1) of inlier points required for accepting a transformation.
// At least this number of points will need to be aligned to accept a pose.
pose.setInlierFraction(0.01f); //内点的数量
// Set the number of samples to use during each iteration (minimum for 6 DoF is 3).
pose.setNumberOfSamples(3); // 估计6DOF需要3个点
// Set the similarity threshold (0-1 between edge lengths of the polygons. The
// closer to 1, the more strict the rejector will be, probably discarding acceptable poses.
pose.setSimilarityThreshold(0.2f);
// Set the maximum distance threshold between two correspondent points in source and target.
// If the distance is larger, the points will be ignored in the alignment process.
pose.setMaxCorrespondenceDistance(1.0f); // 允许的最大距离
pose.setMaximumIterations(50000); // 迭代次数
pose.align(*alignedModel);
if (pose.hasConverged())
{
Eigen::Matrix4f transformation = pose.getFinalTransformation();
Eigen::Matrix3f rotation = transformation.block<3, 3>(0, 0);
Eigen::Vector3f translation = transformation.block<3, 1>(0, 3);
std::cout << "Transformation matrix:" << std::endl << std::endl;
printf("\t\t | %6.3f %6.3f %6.3f | \n", rotation(0, 0), rotation(0, 1), rotation(0, 2));
printf("\t\tR = | %6.3f %6.3f %6.3f | \n", rotation(1, 0), rotation(1, 1), rotation(1, 2));
printf("\t\t | %6.3f %6.3f %6.3f | \n", rotation(2, 0), rotation(2, 1), rotation(2, 2));
std::cout << std::endl;
printf("\t\tt = < %0.3f, %0.3f, %0.3f >\n", translation(0), translation(1), translation(2));
}
else std::cout << "Did not converge." << std::endl;
}
//点云可视化
// 显示model+scene以及他们的keypoints
void
visualize_pcd(PointCloud::Ptr model, PointCloud::Ptr model_keypoints,PointCloud::Ptr scene, PointCloud::Ptr scene_keypoints)
{
pcl::visualization::PCLVisualizer viewer("registration Viewer");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_color(model, 0, 255, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_color(scene, 255, 0, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_keypoint_color(model_keypoints, 0, 0, 255);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_keypoint_color(scene_keypoints, 0, 0, 255);
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(model, model_color, "model");
viewer.addPointCloud(scene, scene_color, "scene");
viewer.addPointCloud(model_keypoints, model_keypoint_color, "model_keypoints");
viewer.addPointCloud(scene_keypoints, scene_keypoint_color, "scene_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "model_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "scene_keypoints");
while(!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
// 可视化对应关系
//input: model_keypoints, scene_keypoints, model_scene_corrs
void
visualize_corrs(pcl::PointCloud<pcl::PointXYZ>::Ptr model_keypoints,pcl::PointCloud<pcl::PointXYZ>::Ptr scene_keypoints,
pcl::PointCloud<pcl::PointXYZ>::Ptr model,pcl::PointCloud<pcl::PointXYZ>::Ptr scene,
pcl::CorrespondencesPtr model_scene_corrs)
{
// 添加关键点
pcl::visualization::PCLVisualizer viewer("corrs Viewer");
viewer.setBackgroundColor(255, 255, 255);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_color(model, 0, 255, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_color(scene, 255, 0, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> model_keypoint_color(model_keypoints, 0, 255, 255);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> scene_keypoint_color(scene_keypoints, 0, 0, 255);
// viewer.addPointCloud(model, model_color, "model");
// viewer.addPointCloud(scene, scene_color, "scene");
viewer.addPointCloud(model_keypoints, model_keypoint_color, "model_keypoints");
viewer.addPointCloud(scene_keypoints, scene_keypoint_color, "scene_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "model_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "scene_keypoints");
// 可视化对应关系
viewer.addCorrespondences<pcl::PointXYZ>(model_keypoints,scene_keypoints,*model_scene_corrs);
// //添加对应关系
// int i=1;
// for(auto iter=model_scene_corrs->begin();iter!=model_scene_corrs->end();++iter)
// {
// std::stringstream ss_line;
// ss_line << "correspondence_line" << i ;
// i++;
// PointType& model_point = model_keypoints->at (iter->index_query); // 从corrs中获取对应点
// PointType& scene_point = scene_keypoints->at (iter->index_match);
// viewer.addLine<PointType, PointType> (model_point, scene_point, 0, 0, 0, ss_line.str ());
// viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH, 5, ss_line.str ()); // 设置线宽
//
//
//
// }
// 显示
while(!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
// 可视化直方图
void
visualize_Histogram( pcl::PointCloud<pcl::FPFHSignature33>::Ptr model_feature, pcl::PointCloud<pcl::FPFHSignature33>::Ptr scene_feature)
{
pcl::visualization::PCLPlotter plotter;
plotter.addFeatureHistogram(*model_feature, 33); //设置的很坐标长度,该值越大,则显示的越细致
plotter.addFeatureHistogram(*scene_feature, 33); //设置的很坐标长度,该值越大,则显示的越细致
plotter.plot();
}
int main(int argc, char** argv)
{
PointCloud::Ptr aligned_model(new PointCloud); // 变换之后的点云
pcl::CorrespondencesPtr model_scene_corrs (new pcl::Correspondences ()); // model-scene的匹配关系
pcl::PointCloud<pcl::SHOT352>::Ptr model_descriptors_shot(new pcl::PointCloud<pcl::SHOT352>()); // shot特征
pcl::PointCloud<pcl::SHOT352>::Ptr scene_descriptors_shot(new pcl::PointCloud<pcl::SHOT352>());
pcl::PointCloud<pcl::FPFHSignature33>::Ptr model_descriptors(new pcl::PointCloud<pcl::FPFHSignature33>()); // fpfh特征
pcl::PointCloud<pcl::FPFHSignature33>::Ptr scene_descriptors(new pcl::PointCloud<pcl::FPFHSignature33>());
pcl::PointCloud<pcl::PFHSignature125>::Ptr model_descriptors_pfh(new pcl::PointCloud<pcl::PFHSignature125>()); // pfh特征
pcl::PointCloud<pcl::PFHSignature125>::Ptr scene_descriptors_pfh(new pcl::PointCloud<pcl::PFHSignature125>());
PointCloud::Ptr model_keypoint(new PointCloud); // iss关键点
PointCloud::Ptr scene_keypoint(new PointCloud);
pcl::PointCloud<pcl::PointXYZ>::Ptr model_keypoints_shift(new pcl::PointCloud<pcl::PointXYZ>); // shift关键点
pcl::PointCloud<pcl::PointXYZ>::Ptr scene_keypoints_shift(new pcl::PointCloud<pcl::PointXYZ>);
PointCloud::Ptr cloud_src_model(new PointCloud); //model点云 读入
PointCloud::Ptr cloud_src_scene(new PointCloud); //scene点云
PointCloud::Ptr model(new PointCloud); //model点云 降采样后,一切计算是以这个为基础的
PointCloud::Ptr scene(new PointCloud); //scene点云
pcl::PointCloud<pcl::Normal>::Ptr model_normals(new pcl::PointCloud<pcl::Normal>); // 法向量
pcl::PointCloud<pcl::Normal>::Ptr scene_normals(new pcl::PointCloud<pcl::Normal>);
//加载点云
if (argc<3)
{
cout<<".exe model.pcd scene.pcd"<<endl;
return -1;
}
pcl::io::loadPCDFile(argv[1], *cloud_src_model);
pcl::io::loadPCDFile(argv[2], *cloud_src_scene);
cout << "/" << endl;
cout << "原始model点云数量:" << cloud_src_model->size() << endl;
cout << "原始scene点云数量:" << cloud_src_scene->size() << endl;
model=cloud_src_model;
scene=cloud_src_scene;
// //均匀采样对象
// pcl::VoxelGrid<pcl::PointXYZ> filter;
// filter.setLeafSize(2,2,2);
// filter.setInputCloud(cloud_src_model);
// filter.filter(*model);
// cout << "降采样后点云数量:" << model->size() << endl;
//
// filter.setInputCloud(cloud_src_scene);
// filter.filter(*scene);
// cout << "降采样后点云数量:" << scene->size() << endl;
// 计算降采样后的点云的法线
est_normals(model,model_normals);
est_normals(scene,scene_normals);
// 计算关键点
// compute_iss(model,model_keypoint);
// compute_iss(scene,scene_keypoint);
compute_shift(model,model_keypoints_shift);
compute_shift(scene,scene_keypoints_shift);
// 根据关键点计算特征
// compute_fpfh(model_keypoint,model,model_normals,model_descriptors); // fpfh特征
// compute_fpfh(scene_keypoint,scene,scene_normals,scene_descriptors);
// compute_shot(model_keypoint,model,model_normals,model_descriptors_shot); // shot特征
// compute_shot(scene_keypoint,scene,scene_normals,scene_descriptors_shot);
compute_pfh(model_keypoints_shift,model,model_normals,model_descriptors_pfh); // pfh
compute_pfh(scene_keypoints_shift,scene,scene_normals,scene_descriptors_pfh);
//match 得到对应关系:model_scene_corrs
// find_match(model_descriptors,scene_descriptors,model_scene_corrs); // fpfh
// find_match_shot(model_descriptors_shot,scene_descriptors_shot,model_scene_corrs); // shot
find_match_pfh(model_descriptors_pfh,scene_descriptors_pfh,model_scene_corrs); // pfh
// pose estimte
// estimationPose(model_keypoint,scene_keypoint,model_descriptors_pfh,scene_descriptors_pfh,aligned_model);
//可视化
// visualize_pcd(model,model_keypoint,scene, scene_keypoint); // 降采样后的点云 , 特征点
visualize_corrs(model_keypoints_shift,scene_keypoints_shift,model,scene,model_scene_corrs); // 可视化对应关系
// visualize_Histogram(model_descriptors,scene_descriptors); // 可视化fpfh直方图
return 0;
}















 762
762











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











