







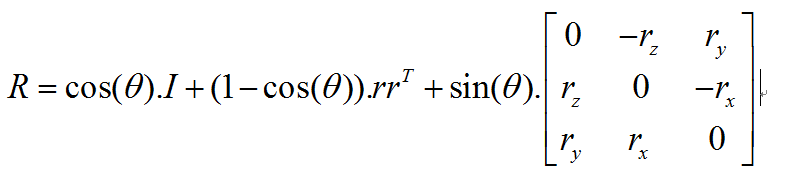
这里旋转主要可以采用旋转向量, 旋转矩阵, 欧拉角,四元数。
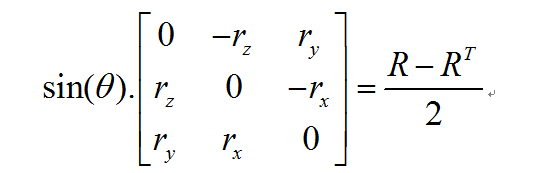
我们也能反向从坐标轴表现形式得到旋转矩阵:
欧拉角是采用偏航, 俯仰, 滚转(yaw, pitch, roll来表示)
这里是先绕Z, 再绕Y,最后绕X旋转得到的
四元数:q = [cos(a/2) , Nxsin(a/2), Nxsin(a/2), Nzsin(a/2)]
两个点之间的变换关系可以表示为:
p1 = q *p * (q)-1
#include <iostream>
#include<cmath>
using namespace std;
#include<eigen3/Eigen/Core>
#include<eigen3/Eigen/Geometry>
int main(int argc, char **argv) {
Eigen::Matrix3d rotation_matrix = Eigen::Matrix3d::Identity();
Eigen::AngleAxisd rotation_vector(M_PI/4, Eigen::Vector3d(0., 0., 1));
cout << rotation_vector.matrix()<<endl;
std::cout << "Hello, world!" << std::endl;
rotation_matrix = rotation_vector.toRotationMatrix();
Eigen::Vector3d v(1, 0 , 0);
Eigen::Vector3d v_rotated = rotation_vector * v;
cout << v_rotated<<endl;
Eigen::Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0);
cout <<" 欧拉角:"<< euler_angles.transpose()<<endl;
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
T.rotate(rotation_vector);
T.pretranslate(Eigen::Vector3d(1, 3, 4));
cout << T.matrix()<<endl;
Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector);
cout <<"四元数:" << q.coeffs()<<endl;
v_rotated = q * v; /*数学上为q*V * v(-1)*/
cout<<v_rotated<<endl;
//cout << T.rotate(rotation_vector)<<endl;
return 0;
}















 1379
1379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









