







MWORKS 2025a将于2月28日晚正式上线,欢迎大家在同元软控官网下载试用~
一、引言
伴随着MWORKS.Sysplorer 2025a的发布,同元软控机械专业模型库也带来了一波深度更新。同元软控机械专业模型库聚焦于航空航天、工程机械、汽车、船舶、装备制造等行业应用,在功能上、应用范围以及易用性上进行了又一次重磅升级。这一次,我们围绕着三维机械模型库进行了全面的升级,涵盖了多体模型库、接触模型库、柔性体模型库以及三维传动模型库,带来了一系列创新的功能和改进。无论您是从事机械设计、系统仿真,还是研发复杂的机械传动系统,2025a版都将为您提供更加强大、精确、便捷的工具,助力工程设计与创新更进一步。
二、模型库概述
同元软控模型产品团队基于Modelica语言推出7个机械模型库,能够满足对1D、2D以及3D系统的建模仿真需求,实现对多行业应用场景的运动行为模拟、机械传动系统分析、三维系统可视化显示以及多体系统和刚柔耦合系统动力学响应计算等。

机械专业模型库层级与CAD工具箱联系
注:
1.同元软控机械模型库在后续升级均依赖于同元基础库Modelica.4.0.0.TY.1;
2.机械模型库的接口与Modelica标准库中机械库通用。
1.产品功能
前面对机械模型库进行了整体描述,下面回顾下各个模型库的功能要点和应用场景:
- 基础机械模型库-TYMechanics
基础机械模型库包含一维平动机械模型和一维转动机械模型,用于基础机械力学特性建模仿真,提供可变质量与可变转动惯量、非线性弹簧阻尼、多种接触和摩擦、理想齿轮、齿轮齿条等力学模型。
满足工程领域对各种机械力学特性,包括线性、非线性和时变特性的建模需求,可应用于各类机电系统建模仿真和各种性能分析,例如弹跳小球,车辆、工业装备中的各类直线驱动或减速器传动系统的性能分析。

弹跳小球示例
- 传动系统模型库-TYDriveline
传动系统模型库是在基础机械模型库基础上开发的,是面向传动系统建模仿真的专用模型库,包含机构、动力源、齿轮、连接器、刹车、传动附件、执行器、绳索,共8类传动模型。
模型库覆盖车辆、船舶、航空航天、工程机械、装备制造等行业的传动系统模型需求,提供不同颗粒度等级模型,可以实现对机械传动系统多种详细特性的分析和改进需求,例如振动冲击、传动精度、动态载荷、传动效率等性能。


绘图机和滚珠丝杠驱动模拟示例
- 多体系统模型库-TYMultibody
多体系统模型库是通用的三维多刚体系统建模仿真模型库,应用于多体动力学和复杂多领域系统的运动学和动力学分析,包含各种刚体、柔性梁、关节副、约束、力和传感器模型,可应用于车辆、船舶、航空航天、工程机械等专业领域,满足对多体动力学系统的动态特性分析和性能优化需求。
常见的典型案例有:工业机器人运动精度、动态载荷以及振动特征等进行分析;飞机起落架系统机械运动控制及动力学分析等。
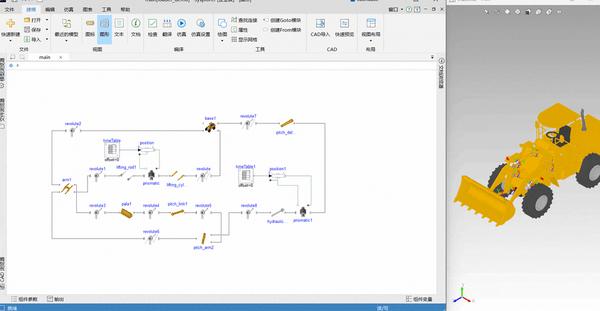
铲运机铲斗作业系统建模与仿真案例
- 柔性体模型库-TYFlexBody
柔性体模型库包括柔性体、模态梁、读取Mnf文件信息组件等模型,适用于部分变形不可忽略构件的多体动力学系统的建立,结合机械多体系统模型库,可满足各种场景刚柔耦合系统建模需求。
该库可用于航空航天、车辆船舶、工程机械等领域,支持用户在刚柔耦合系统中的方案设计、系统集成阶段的动态特性仿真分析,模拟其中柔性体的物理特性,典型的应用场景包括:工程机械混凝土泵车臂架刚柔耦合仿真、航天器卫星帆板刚柔耦合仿真、车辆动力学刚柔耦合仿真、航空起落架刚柔耦合仿真、机器人运动控制刚柔耦合仿真。
柔性机械臂仿真示例
- 接触模型库-TYContact
接触模型库包括球体、圆柱体、圆锥体、平面等常用刚体的接触元件,可以模拟不同刚体间的点接触和线接触功能,也可以模拟其在二维固定平面的简化接触,满足各种场景中机械接触元件的接触状态检测和接触力计算需求。其作为产品货架体系中一款专业基础库,是机械多体库的功能扩展,研究和解决机械接触领域中的接触状态和接触力的问题。
接触库的典型的应用场景包括:牛顿摆教学案例、机械臂夹取物体的接触仿真、机械加工中的接触材料特性分析、以及常用机械的接触仿真。
牛顿摆系统案例
- 三维传动系统模型库-TYDriveline3D
三维传动系统模型库涵盖了各种机械传动系统部件建模仿真模型库,如绳索传动、链条传动、齿轮传动、轴承库以及空间机构传动。
该库可用于航空航天、车辆船舶、工程机械等领域机械传动系统的设计、仿真以及优化,例如三维齿轮建模及啮合传动模拟、验证绳索滑轮传动系统的动力学特性等,满足对三维传动系统动态载荷计算和效率提升需求。
三维绳索滑轮传动系统示例
- 平面机械库-TYMechanics2D
平面机械模型库包括多种力源、平面环境重力、平面组件、运动副、传感器等模型。模型支持三个自由度设置,包括沿x和y轴向的平移以及绕z轴的旋转。模型元素可在3D视图中进行动画演示。
该库可应用于各类平面运动机械的系统设计和运动学及动力学仿真分析,例如挖掘机机械臂模型设计和系统运动学分析、车辆悬架系统振动特性分析等,用户可根据实际需求搭建高粒度平面机械模型及系统模型。

曲柄滑块机构系统示例
2.产品应用

三、升级亮点
1.多体系统模型库(V1.3.1)
1)新增5个模型:矩形副、等速副、平面副、平行约束、垂直约束,适配CAD工具箱3.0版本,为解析导入的装配体提供约束模型;

2)新增质量直线力模型,有效减少系统的非线性方程数,提高系统仿真效率;

3)新增1个典型案例:六自由度机械臂作业系统,为机械臂抓取接触模拟、机械臂刚柔耦合分析等应用场景提供基础模型;
4)优化修复万向节、球副等12个模型的模型功能;
5)对部分模型的文档浏览器升级优化,完善部分模型的原理阐述和接口模型的描述。


接口帮助文档和新增参数展示
2.接触模型库(V1.1.0)
1)新增2个简化平面点接触模型:圆圆接触、圆和直线接触;
2)新增3个点接触模型:球和直线接触、球和样条曲线接触、球和多边形面接触;
3)新增2个面接触模型:矩形面和矩形面接触、矩形面和圆面接触;

4)新增3个典型案例:平衡球模型、平面多物体碰撞、车轮滚动3个典型案例;
平衡球示例
5)对部分模型的文档浏览器升级优化,增加部分参数使用描述。
3.三维传动模型库(V2.0.1)
1)新增链传动库,包含理想链条系统、链条刚体、弹性链条以及链轮等模型,支持模拟常见的链条链轮传动系统,且计算速度快;
2)新增齿轮传动库,包含直/斜齿轮刚体、内啮合直/斜齿轮刚体、各类啮合接触力以及行星齿轮等模型,可参数化生成GB/T齿轮刚体,并实现齿轮之间的完全啮合模拟;
3)新增轴承库,包含弹性轴承、球轴承、各种厂商型号的滚子轴承等模型,便于用户快速建模和应用;
4)新增机构传动库,包含四连杆和曲柄滑块机构等模型;

5)新增链传动、齿轮和轴承传动等库的7个典型案例;

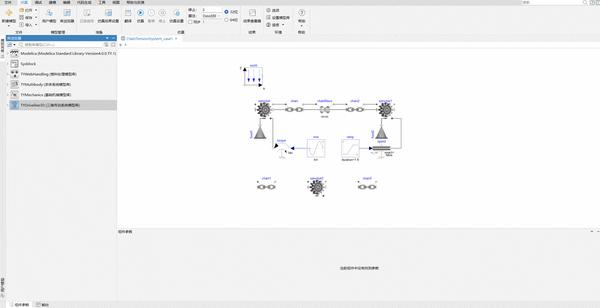
直齿轮传动简单系统
系统仿真动画及啮合放大图
6)对部分模型的文档浏览器升级优化,增加部分参数使用描述。
4.柔性体模型库(V1.0.2)
1)新增解析和动画显示Mnf文件中的梁单元,拓展了Mnf解析器支持范围;
2)提升模型库的易用性,更改柔性体组件中调用Mnf文件的方式,由原本的调用固定文件夹下数字命名的Mnf文件改为调用相对路径或绝对路径下的英文、数字和下划线命名的Mnf文件。

梁模型简单示例
四、应用案例
1.6自由度机械臂抓取作业系统
1)问题描述
6自由度机械臂是工业自动化、物流以及医疗等领域广泛使用的重要装备,在三维空间中具有较高的灵活性和精确度,能够完成复杂的抓取、搬运、装配等任务。
6自由度机械臂通常由以下几个部分组成:基座、关节、末端执行器、驱动系统、控制系统等。在抓取作业中,机械臂的任务包括定位、抓取、搬运和释放物体,高效地完成各种抓取任务的关键是需要通过精准的运动控制、力反馈控制等。
2)解决方案
通过使用多体系统模型库和CAD工具箱,可以快速建立包含关节驱动和各刚体支臂在内的6自由度机械臂多体动力学分析模型,对机械臂抓取作业过程的运动模拟,实现精准运动轨迹控制。
6自由度机械臂多体动力学模型搭建及仿真结果
2.链条传动张紧布置模拟
1)问题描述
链条传动系统中,链条张紧是确保链条在工作过程中保持适当张力的关键,弹簧张紧是一种常见的方式。弹簧张紧布置广泛应用于汽车、摩托车的链条传动系统、工业机械中输送机设备等,影响其张紧效果的需要关键问题有:
①链条的需求张力估计:需要根据链条的型号、工作负荷、传动速度等因素来合理选择弹簧的初始张力和弹簧常数;
②张紧轮的设计与位置:张紧轮的布置需要使链条的张力均匀分布,确保能够有效拉紧链条;
③链条的动态响应能力:负载变化、传动速度变化等因素都可能导致链条的张力波动。

链条传动张紧装置设计简图
2)解决方案
通过使用三维传动系统模型库、多体模型库以及基础机械库,可以搭建包含链轮、链条以及张紧轮等模型的链条张紧系统。
链条张紧系统模型搭建
该系统通过改变张紧轮的位置和弹簧参数,探索对链条张力影响的规律,进而在指导链条传动系统设计中,能够合理选择张紧装置的参数和规格,确保系统的长期稳定运行。
3)结果分析
对链条张紧系统制定了三个工况分析,分别是改变张紧装置的弹簧规格和张紧轮的初始位置,如下表所示:
| 参数类型 | 张紧轮位置 | 弹簧刚度 | 弹簧原长 |
| 工况1(无张紧) | {0,0.7,0} | 1e4N | 0m |
| 工况2 | {0,0.7,0} | 1e4N | 0.2m |
| 工况3 | {0,0.9,0} | 1e4N | 0.2m |
各工况的仿真曲线和动画如下所示:
工况1仿真结果
 工况2仿真结果
工况2仿真结果
 工况3仿真结果
工况3仿真结果
通过对上图的结果查看,在t=3s时刻,工况1的链条张力为2440N左右,工况2的链条张力为3000N左右,工况3的链条张力为5760N左右。
因此,改变弹簧的规格和张紧轮的布置位置,可以有效提高链条的张力,得到的规律有:
①需要微调链条的张力,可以调整弹簧张紧装置的弹簧规格;
②改变张力轮的布置位置,可以大幅度改变链条张力。
由此,用户通过链条张紧系统模拟实际链条传动系统的布置,将链条张力调节至目标值。
3.行星齿轮变速系统
1)问题描述
行星齿轮变速系统是一种复杂的齿轮传动机构,广泛应用于自动变速器、机器人和航空航天等领域。
该系统由一个中心的太阳轮、多个行星轮和一个内齿圈组成,行星轮围绕太阳轮旋转,同时在内圈内进行啮合,实现高效的动力传递。例如,汽车自动变速器中的行星齿轮可以通过改变输入和输出的相对运动,实现多种传动比,这种灵活性使得车辆在不同速度下都能保持最佳的动力输出。
2)解决方案
通过使用三维传动系统模型库、多体模型库和基础机械库,可以快速建立如图所示的包含驱动源、固定端以及行星齿轮的系统动力学分析模型。
行星齿轮变速系统模型
3)结果分析
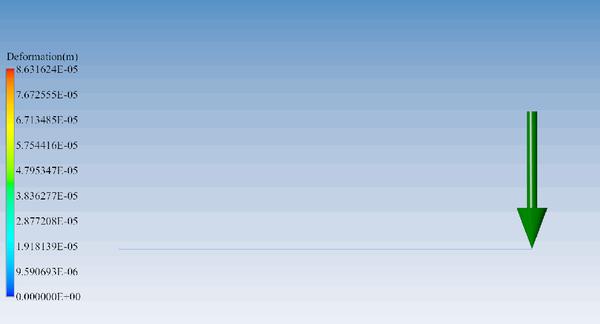
该系统通过参数化生成标准齿轮模型,模拟行星齿轮各行星轮的实际啮合行为,并且精准计算啮合过程中各个接触点的啮合力,可以评估齿轮齿面强度,确保齿轮在高负荷、长时间运行的条件下不会发生齿面疲劳、齿面剥落或齿裂等损伤问题。
五、使用说明
1.使用注意事项
当我们使用机械模型库升级模型仿真建模的过程中,可能会遇到仿真报错的问题,导致我们对模型调试不知所措。为此,以下列出了一些常见的注意事项,以帮助大家更好地应对这些问题:
- 接触库-连接刚体接口问题
1)在接触模型库使用过程中,应注意接触库组件的两侧机械多体接口为相连刚体的几何特征中心,连线完成之后,可同时显示接触模型与相连刚体的动画,如果几何接触面与刚体表面重合,证明几何接口处的位置、姿态参数设置合理。
2)一对接触刚体的姿态在初始时刻应该保持一致。如果使用CAD工具箱建模,应手动调整两个接触体的几何特征到统一姿态下。
- 三维传动库-齿轮初始角设置
1)单独使用齿轮刚体模型时,只需要其初始角度与实际相同即可;
2)当仿真两齿轮啮合时,在其中加入接触力计算组件,需要保证两个齿轮的初始位置处于啮合状态,具体的计算方法参考帮助文档。

2.常见问题解答
问:多体模型库和标准库中的多体模型有何联系和差异?
答:多体模型库的多体接口和标准库中的多体模型相同,包含变量均为r_0 、R、f,t,可以做到两个模型库的模型互连互用。差异点主要有以下几点:
1)模型应用范围和功能上提升较大:在架构上,多体模型库包含柔性梁模型,可以计算各类截面的欧拉梁模型的变形;在模型上,刚体模型包含各种形状的参数化刚体和变质量刚体,便于用户快速新建刚体模块和解决火箭分离、打捞/捕捉系统中重心和质量变化的问题;运动副中包含耦合副、螺旋副以及一三维融合建模接口等模型,以及力单元模型中
2)模型的帮助文档和易用性提升:多体模型库的参数、变量以及帮助文档均为中文阐述,更好帮助用户入门多体系统建模;


模型的帮助文档对比(以转动副为例)
3)支持多体模型与CAD工具箱迭代使用:新版本多体模型库与CAD工具箱模型适配性做得更好,支持CAD工具箱解析更多的装配体连接约束模型,同时也支持后续的升级迭代。
问:多体模型库和CAD工具箱有什么关系,如何配合使用?
答:多体模型库和CAD工具箱在机械设计和仿真领域中都是十分重要的,二者的关系是:CAD工具箱极大提高多体系统的建模效率,并依赖于多体模型库,是多体系统建模的前处理工具;多体模型库为CAD工具箱提供通用刚体、各种运动副、约束、以及驱动等模型,便于CAD工具箱添加多体组件和智能识别导入装配体的约束模型。
多体系统建模的步骤为:
1)将三维模型(Step、Iges几何文件以及Catia和SolidWorks软件的装配体文件)导入CAD工具箱;
2)根据系统中各部件的运动关系,为各个零部件设置分组,以及添加连接关系(3.0版本的工具箱可以识别运动副,未识别出的运动副,需要手动添加);
3)完成连接关系和驱动的添加,检查并退出工具箱,在Sysplorer平台中用户模型目录下打开自动生成的Modelica模型(CAD浏览器中的main模型);
4)对main模型进行灵活修改,可以为main模型添加其他的运动副、激励源、传感器等模型,以及添加新的接口和其他模型库搭建系统,可根据需求拓展多体系统;
5)检查、编译、仿真多体系统模型,对仿真结果进行查看和迭代设计。
下面以铲运车的铲斗运动模拟为例,给出CAD工具箱和多体模型库使用的流程图。

问:如何使用柔性体模型库对刚柔耦合系统建模?
答:刚柔耦合建模的建模流程可以按照以下步骤:
1)使用多体模型库或CAD工具箱建立完整的多刚体模型并正常仿真运行;
2)使用有限元软件对柔性体进行模态分析并的导出Mnf文件;
3)加载柔性体模型库并将相应的柔性体构建换成柔性体模型;
4)仿真运行,查看柔性体构件的变形、应力或应变等信息,分析柔性体模型对其他刚体模型的影响(与纯刚体模型对比)。
问:建好柔性体模型之后再次打开,需要重新将Mnf文件粘贴到指定路径下,使用麻烦且容易报错。
答:在2025a中,主要进行了如下更新:
1)支持调用相对路径或绝对路径的Mnf文件,可以放在当前工程所在路径下;
2)支持中文路径;
3)支持英文、数字和下划线命名的Mnf文件。
问:使用基础机械模型库和传动系统模型库,如何避免模型初始值有冗余的问题?
答:以一维平动系统为例,弹簧和质量块初始值满足长度要求,弹簧、质量块、固定端锁定前计算位置,防止仿真冲突。

六、后续规划
本文主要对同元软控机械专业模型库和其升级模型进行了简单介绍,更多的模型功能需要大家体验和发掘。此外,我们后续会不断迭代升级同元机械模型库,对三维传动库、接触库以及柔性体库持续进行升级补充,机械模型产品团队重点关注方向有以下几点:
- 三维传动库中,支持带传动功能,可以将作用力或者运动施加到皮带系统的任意皮带轮上;将对绳索库的模型功能提升,支持动滑轮模拟以及绳索分布力功能;
- 接触库中,新增实体对实体通用刚体接触功能和接触模型仿真效率的提升;
- 柔性体库中,进一步提升柔性体模型的易用性、后处理显示效果;
- 机械模型库增加更多的线上教学视频。

七、试用与反馈
MWORKS 2025a即将于2月28日晚正式上线,欢迎大家在同元软控官网上线后进行下载试用。我们诚挚地邀请大家积极试用,并通过您的反馈助力我们不断完善模型产品。我们期待同元机械模型库在未来的项目应用和科研探索中能够蓬勃发展,为众多工程项目的推进提供坚实的支持,并为广大的机械建模与仿真爱好者搭建一个卓越的学习与交流平台!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









