





Development of a Laser-Range-Finder-Based Human Tracking and Control Algorithm for a Marathoner Service Robot
基于激光雷达的马拉松服务机器人的行人跟踪与控制算法研究(2014)
摘要:本文面向可为马拉松运动员提供服务的移动机器人,提出了行人检测算法和障碍物躲避算法。为了满足这一特定机器人应用场景,该机器人需具有在非结构化室外环境中跟踪行人和躲避移动障碍物的能力。为了可使用激光测距仪来检测行人,本文定义了激光雷达行人点簇的属性并应用了SVDD方法。为了能躲避其它移动障碍物完成行人跟踪,本文借助障碍物与机器人之间的距离定义了加权航程。此外,为了平稳无碰撞的绕过障碍物,其算法直接应用了实时的机器人位置向量和至障碍物的最短路径。本文提供的算法经过在室外环境下大量实验验证了可行性。
关键词:行人检测,机器学习,移动机器人,障碍物躲避
A.使用SVDD进行行人检测
激光测距仪在许多机器人系统中可用来检测物体和绘制环境地图。本文中,利用激光测距仪用来检测行人。并且根据文献【18】,激光测距仪被安置在大约行人躯干(胸部、背部)高度位置用来扫描该高度的环境信息。在本节中,我们讨论聚类激光点数中各种形态的模式识别。
本文利用SVVD从扫描点钟提取出行人躯干(胸部、背部)特征。SVVD是一种支持向量学习算法用来解决one-class分类问题。目前2D距离数据利用机器学习进行行人检测的研究现状中,主要是Adaboost。Adaboost算法寻找分类器的最优补偿和最优特征。但是,Adaboost算法是以直线进行划分因此不能描绘介于正负样本间详细的分解先。SVDD可以利用曲线划分,虽在分类方面比Adaboost有着很好的优势,但在实际应用中为得到更好的分类效果,SVDD中的一些特征和参数需要手动选择。
当SVDD算法应用于One-Class分类问题时,可只提供正样本训练数据。当训练完成时,必须对每个测试向量划分类别属性。SVDD算法近似于正类的支持对象。具体如下:考虑一个球B,圆心为a,半径为R,并且包括N个对象xi,i=1,......N.的训练集D。SVDD的主要思想就是寻找一个球能同时得到两个相互制约的条件(球应尽可能的小,包含的点数应尽可能的多):

其中,松懈变量ξi 表示与第i个在球外的训练样本方差有关的惩罚,权衡常数C用来控制每个量的重要度。仅仅利用在边界上的训练数据就可以完成对测试样本的分类,因此计算不是很复杂。关于该算法的详细介绍,可参阅参考文献【19】。

图1 部分行人躯干扫描距离。
左图为1.3米高度,行人背部扫描点;右图为1.3米高度,行人侧面扫描点。
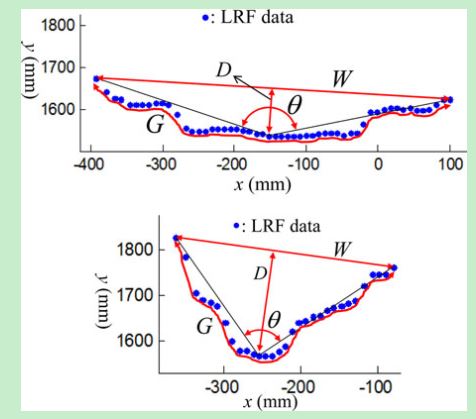
图2 四种聚类激光点簇特征的定义
由于,服装表面总是在变化,因此激光雷达行人特征形状不能简单被定义。为分析激光雷达聚类点的特点,本文提取了539个样本进行训练SVDD。这些训练样本是距移动机器人1-5m不同位置的5个不同的行人的采集的数据点。在此说明,本文用移动机器人跟踪1-5m内的行人。不同方向的物体被扫描,如图1所示。且扫描高度为0.9-1.3m。图2显示了图1中实际激光雷达扫描点。本文初始定义了4种激光雷达聚类点簇的特征用来描述行人。如图2所示,W表示行人点簇的宽度,它的距离是指第一个和最后一个激光点之间的距离;G代表点簇的周长,D代表深度,是指W垂直平分线与最远激光点交点的距离。θ 表示最远点与第一个激光点所形成直线与最远点与最后一个激光点所形成直线的夹角。 此外,本文还定义了W/G这一特征,用来表征聚类点簇形状的鲁棒性。
SVDD利用定义在特征空间上的球来分辨出一系列正样本。SVDD的目标是得到尽可能多的包含正样本的球体决策分界线。利用Gaussian Kernel来表示分界线,如图3所示。Gaussian Kernel使得分界线的表面是不规则的。

图4 原始数据及及分类标准后
当SVDD考虑多与2个特征时,将很难用图形化显示结果。为了简单方便,本文只展示了在W/G域上的SVDD分析,如图3。所有在分界线内的激光雷达点均认为为行人点,反之为非行人点。
B.环境特征提取
本节中,在室外环境下进行测试SVDD训练分类器。为了获得聚类点簇的点数,需先获得LRF的采样点。如图4所示。其中移动机器人的位置坐标为(0,0)。然后,提取聚类点集特征。11个聚类点簇别提取,如图4.b中圆圈所示。

图4 实验环境及聚类点簇
各聚类点簇的5个特征总结如表1所示。其中,点簇4和9点数不够充分,因此不予以考虑。
表1 11个激光点簇的特征

为了判定聚类点簇是否来自于行人,本文利用上文中训练得到的分界线。为简单的可视化结果,从5个特征中选取了2个特征。如图5所示,WIth-Angle和W-W/G分别用来做特性边界的结果。

图5
图中蓝点表示训练数据,根据SVDD算法训练得到的边界包含了绝大多数训练样本。在图5.a的结果中,只有4个聚类点簇:1,7,8,10在边界内。在图5.b结果中,只有3个聚类点簇:1,7,8在边界内。因此可知,聚类点簇10也就是图4中的广告牌,采用SVDD和W,W/G后被辨识为负样本。但是聚类点簇7,8分别对应图4中的植物和岩石并没有被辨识为负样本。这是由于行人点簇1和非行人点簇7、8的特征基本一样,有些树木和岩石的形状与行人十分相似,在2D距离数据中很难将他们辨别出来。
上述的分析标明了正确识别的比率根据选定的特征是不同的。在下文中,将给出如何为SVDD选出适合检测行人的特征。
C.最优特征选择
在本节中,将给出如何选取一系列特征来达到行人的最优识别。为评估文中提出的方法,进行了行人检测正确率实验的验证。实验环境中有许多外形类似于行人的树木和树枝,如图6.a所示,选取了240帧,5775激光扫描点。如图6.b所示,即使每帧中只有一个行人,但存在一些许多类似行人的点集。利用5个特征的各种组合和SVDD算法后进行统计实验结果。CHD记为行人正确检测,IHD记为障碍物检测为行人。表2显示了了10种特征组合以及结果输出,例如BE代表了用了表1第一列中的两个特征:G和W/G。
当SVDD中运用了更多的特征进行提取时,结果也相对较好,但同时也增加了计算量。因此,我们选择ACE组合:W,A,W/G来进行检测行人。这个组合采用相对少的特征获得98%的正确率和7%的IHD误检率。此外,对于行人跟踪而言,高的正确率对于系统是十分重要的,因为IHD的情况可以由数据关联来解决。
为显示所选特征组合ACE的良好性能,将其与只有一个特征W进行比较。图7显示了用不同特征激光雷达扫描的候选数目。图7(上)显示了只利用W的实验结果。实验中,当聚类点簇的宽度为:【200,700mm】内,就将其判定为疑似行人目标。虽然真实环境中只有一个行人,但是存在了许多树木和路灯?其宽度和行人十分接近,因此平均每帧中的疑似行人目标有4.66.图7(下)显示了利用W,A,W/G组合的实验结果。在相同实验环境下,每帧的似行人目标有3.17个,IDH比率减低。因此实验结果表明W,A,W/G可以用来描述激光雷达数据点的行人特征。
在某些情况下,可能会降相似行人障碍物判断为行人,但实验的主要目的不是进行精确的获知行人的数目,而是进行跟踪某一运动员并躲避障碍,因此这并不影响实验的进行。某些小的错误可以有接下来的估计和数据关联进行解决。
体会:
确实是用了3个小时,才完成了三页的内容,不过这也算是新的努力的开启。今天速度较慢的一个原因是在网页上直接编译操作有点不习惯,明天先写在WORD然后上传。
Fighting!















 574
574

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









