







1、简述
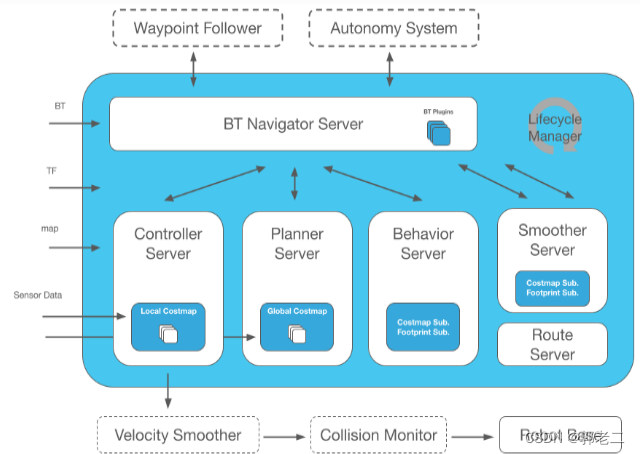
在 Navigation2 里,机器人的导航是一项复杂的任务,包含路径规划、避障、恢复机制等多个子任务。行为树能把这些子任务组织成清晰的层次结构,让机器人可以依据不同的情况做出合理的决策。例如,当机器人在导航途中碰到障碍物时,行为树可以决定是重新规划路径、尝试绕过障碍物,还是采取其他恢复策略。
2、Nav2节点查看
1)节点描述
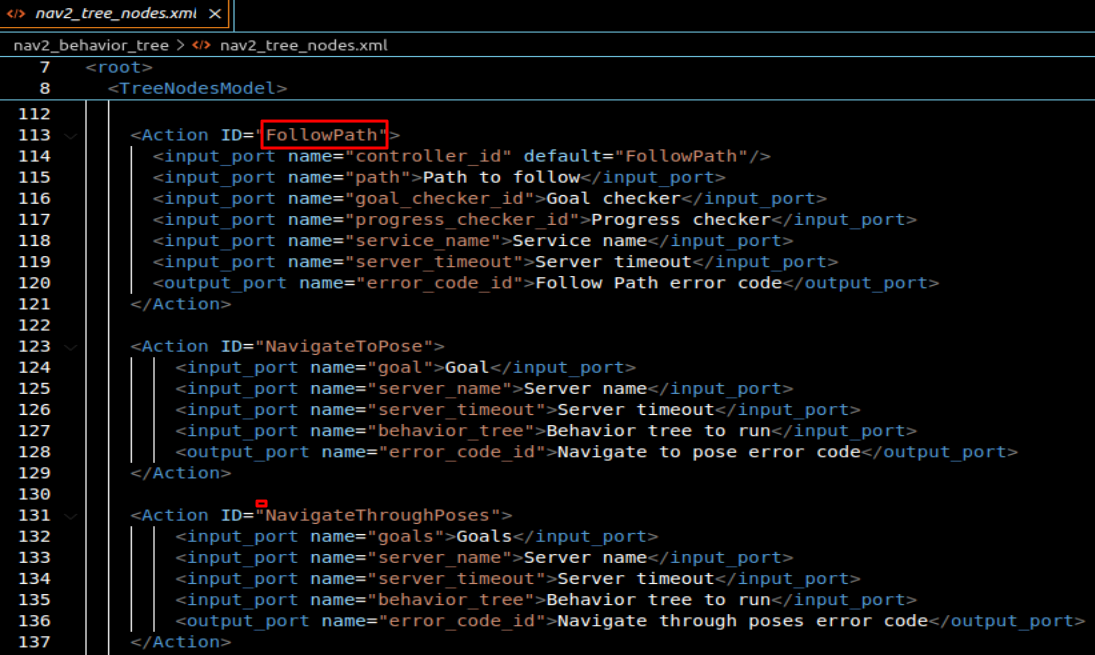
Navigation2 行为树节点,可以在 navigation2/nav2_behavior_tree/nav2_tree_nodes.xml 中看到描述
2)使用 Groot 查看节点
Groot的源码编译参见:【ROS】Nav2源码之nav2_behavior_tree(行为树)详解
运行 Groot 选择Editor

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1726
1726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











