







 本文深入探讨了在三维空间中描述物体方位的三种方法:矩阵、欧拉角与四元数。矩阵提供了一种直观的旋转表示方式,而欧拉角则以角度值的形式简洁表达方位。四元数则解决了欧拉角的别名问题,并提供了平滑插值的解决方案。文章详细比较了每种表示方法的优缺点。
本文深入探讨了在三维空间中描述物体方位的三种方法:矩阵、欧拉角与四元数。矩阵提供了一种直观的旋转表示方式,而欧拉角则以角度值的形式简洁表达方位。四元数则解决了欧拉角的别名问题,并提供了平滑插值的解决方案。文章详细比较了每种表示方法的优缺点。
方位基本概念介绍
1,什么是方位?直观地说,方位主要描述的是物体的朝向。比如:我们知道的向量,它就只有方向但没有方位,因为它只有大小,而没有厚度和宽度,所以让向量自转其属性是不会发生任何变化的。然而,如果是一个物体,让它和向量一样自转,你会发现物体的朝向改变了,即方位发生了变化。示意图如下:

2,方位和角位移关系:我们知道不能用绝对坐标来描述物体的位置,要描述物体位置,必须把物体放在特定的参考系中(参考点)。同样,描述物体方位时,也不能使用绝对量,方位是通过相对已知方位的旋转来描述的。而这个旋转的量就称作角位移。在数学上,方位和角位移是等价的。但在概念上它们是有区别的,方位和角位移的区别就类似点和向量的区别一样。方位就只是直观地描述了方位,而角位移不仅描述了方位还描述了从源方位到新方位变换的过程(例如,从旧方位到新方位的角位移,或者从惯性坐标系到物体坐标系的角位移)。
3,总的来说,3D中描述物体方位的方法一般有3种:矩阵,欧拉角,四元数。而我们用矩阵和四元数来描述角位移,用欧拉角来描述方位。下面我们就来分别讲下矩阵,欧拉角,四元数的具体实现以及使用它们的优缺点。
矩阵形式
1,用矩阵描述方位其实就是用一个3 × 3的旋转矩阵来表示,这个矩阵的三行必须是基向量(单位向量且互相垂直),对应着新坐标系的三个轴。
2,矩阵形式的优点:
- 可以立即进行向量的旋转(相乘即可)。
- 现在的图形API接口一般也是用的矩阵形式,所以如果你用的其他方式表示方位,在渲染管线的某处也要将其转换为矩阵形式。
- 多个角位移连接,如知道A相对于B的方位,又知道B相对于C的方位,可以直接使用矩阵表示出A相对于C的方位,即前面章节讲的矩阵的连接方法。
- 矩阵形式表示方位,很容易求它的逆矩阵,因为旋转矩阵是正交的,其逆矩阵只要简单的矩阵转置运算即可。
3,矩阵形式的缺点:
- 矩阵占用了更多的内存,3 × 3矩阵用9个数来保存方位,而实际上只需要3个数就能够确定了,特别是一些动画系统中,如骨骼动画就是通过控制父块和子块的相对方位来实现动作的,该模型假设被分解为15个块,每一帧为每一块保存一个方位,动画频率是15Hz,这就意味着每秒需要保存15×15=225个方位。使用矩阵形式,则每秒需要4×9×225=8100字节,而使用欧拉角,同样的数据只需4×3×225=2700字节。所以对于30s的动画数据,矩阵就比欧拉角多占用162K字节。
- 难于使用,不直观。人类考虑方位最直接的方式是角度,而矩阵使用的是向量。
- 矩阵可能是病态的,就是前面章节讲的正交矩阵,矩阵可能接受到坏数据。
欧拉角
1,什么是欧拉角?欧拉角将方位分解为绕三个互相垂直轴的旋转,只需三个角度值数据确定一个方位。而至于是绕哪三个轴,按什么顺序,旋转正方向等其实都是可以我们自己任意设定的,但一般有意义的设定是使用笛卡尔坐标系作为三个轴,旋转顺序使用“heading-pitch-bank”,即heading为绕y轴的旋转量,经过heading旋转后,pitch为绕x轴的旋转量,最后,经过了heading和pitch,bank为绕z轴的旋转量(绕的轴是物体坐标系轴而不是惯性坐标系轴)。旋转正方向一般使用左手法则确定。注意,上面说的“heading-pitch-bank”旋转顺序是针对物体从惯性坐标系到物体坐标系的变换(世界坐标系到物体坐标系的变换),这种形式的变换开始时惯性坐标系和物体坐标系是重合的。而对于从物体坐标系到惯性坐标系的变换,这个旋转顺序是相反的,称作“roll-pitch-yaw”,roll类似bank,yaw类似heading。
2,欧拉角的优点:
- 欧拉角对于我们来说很容易使用,最为直观,数据就是角度值。
- 最为简洁,内存开销最小,只用三个数来表达方位。
- 任意三个数都是合法的,即没有不合法的欧拉角,当然数值可能不对,但至少它们是合法的。可矩阵和四元数就不一定是这样了。
3,欧拉角的缺点:
- 给定方位的表达方式不唯一,我们把其称为别名问题,具体原因是:1,角度天生存在周期性,将一个角度加上360°的倍数时,方位不会改变。2,三个角度不互相独立,如,pitch 135度等价于heading 180°,pitch 45°,然后bank 180°。所以为了解决上面说的同一个方位表达方式不唯一的情况,我们可以限定角度范围,即heading和bank限定在-180°到+180°之间,pitch限定在-90°到+90°之间。这样,在限定范围内,就只存在一个欧拉角描述某个方位了。事实上,还存在一个违反唯一性的情况:先heading 45°再pitch 90°,这与先pitch 90°再bank 45°是等价的。即只要pitch = ±90°时,heading-pitch与pitch-bank等效,我们称这种为万向锁。为了消除这个别名问题,我们一般规定如果pitch = ±90°时,则bank为零。
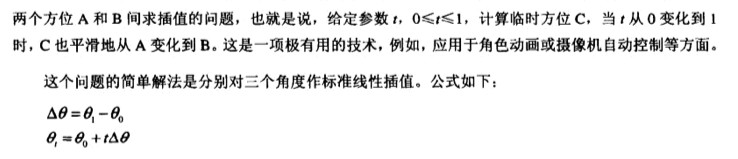
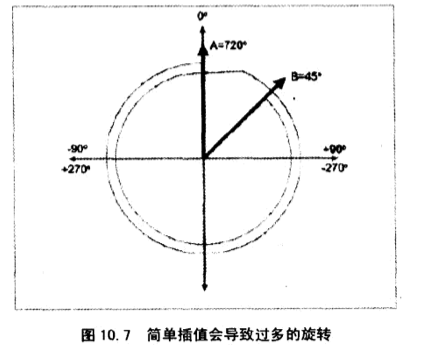
- 两个角度间求插值非常困难,先来说说什么是插值,插值其实就是指给你一个起点A和终点B,那么从A运动到B的轨迹是需要计算的,即A,B之间临时点的计算就是插值。再来看下书上的解释:
其实上面的插值计算就还有很多问题:第一,如果没有限制欧拉角,将得到很大的角度差。如下面A,B两个方位,其实它们只相差45°,但插值会在错误的方向上绕将近两周。
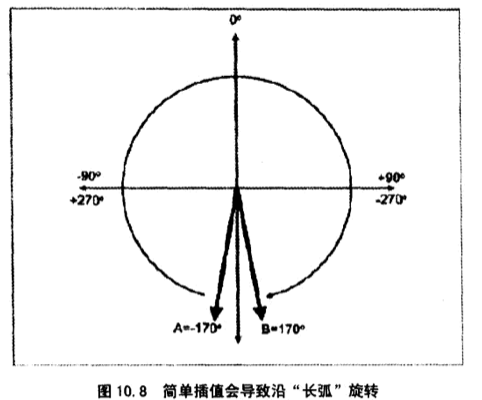
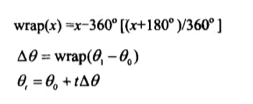
当然这种问题只要限制欧拉角范围就可以避免了。但插值还会有另外一个问题,这个问题是由于旋转角度的周期性引起的。如A的heading为-170°,B的heading为170°。这两个值只相差20°,但插值操作会错误的走’长弧’,绕了340°而不是更短的20°。如下图所示:
当然这个问题也是可以解决的,我们可以自己求得最短的弧,公式如下:
上面的两类问题,我们都可以解决,不过插值还有一个最坑的问题,是属于底层问题,至今都没有简单的解决方案–万向锁问题。这个问题会导致抖动,路径错误等现象,根本原因是由于插值过程中角速度不是恒定的。这是一个用三个数表达3D方位的方法与生俱来的问题,我们可以改变问题,但不能消灭它,任何使用三个数来表达3D方位的系统,如能保证空间的唯一性,就都会遇到这些问题。我们将在下一章节讲怎么用四元数解决这些问题。


















 1102
1102

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









