







本部分涉及内容如下图:
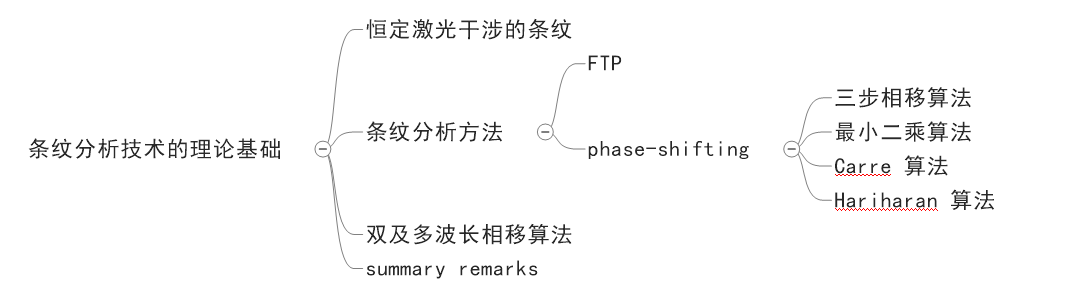
该部分主要对条纹分析方法及多波长相移算法进行了部分介绍,这里所说的条纹分析技术不仅适用于数字条纹分析,还适用于激光干涉测量技术。条纹分析技术始于牛顿环的研究(测试表面和参考表面的干涉)。
条纹分析技术依据算法方式可以分为FTP方法和相移方法;FTP法需要采用较少的条纹即可以进行测量因此可以用于对速度要求较高的场景,相移法则具备较高的分辨率以及抗反射及外界干扰的能力。
双及多波长相移算法的引入则能够极大的提升条纹频率,从而提升系统的鲁棒性。由于恒定激光干涉的条纹这部分只是提了一下激光的复数表现形式,并没有什么可以直接参考的东西,这里略过不讲。直接进入条纹分析方法部分。
条纹分析方法
FTP
带相位的条纹可以展成复数形式

FTP方法的基本原理是:采用带通滤波器滤除直流成分,即可获得相位值。然而我们知道:世界上不可能有完全纯净的东西,所以其成像质量相对较差。
为此,许多大佬们开发了一系列技术解决这些问题。比如:
1,WFT(Windowed Fourier Transform)
加窗傅里叶变换是一种局部(也就是所谓的窗)的FT技术,能够expands the applications。但这种方法仍然不能有效的剔除基频成分。
2,投射Uniform DC pattern的形式
这种方法返璞大自然:直接相减,虽然可以im
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2884
2884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









