








起飞流程:首先旋翼爬升到30m(默认,可根据需要调整),然后悬停2s,背推桨启动旋转,飞机开始沿机头方向加速前进(此过程旋翼桨转速逐渐减小,飞机高度保持不变),当空速达到20m/s后,旋翼桨完全停转,飞机继续沿机头方向前进并开始爬升高度,当高度达到70m时(默认,可根据需要调整),此后飞机进入归航点,保护盘旋,等待地面站下一步指令。
MR+FW距离:80-150m(主要受风影响)
FW距离:300-500m(主要受风影响)
综上,飞机起飞后到转向归航点,实际需要沿机头方向前进380-650米,而高度在30-70m(默认),根据这些我们就需要满足一定条件的起降场地:
| 起飞场地条件(通常情况下满足起飞肯定满足降落) | 地形 | 5mx5m地势平坦区域(小于5度),无沙尘,无小碎石,无电线杆、大树、高层建筑等障碍 |
| 起降场地风向选择 | 尽量逆风起降,场地限制可小侧风 | |
| 净空条件 | 半径800m内无高山、高楼、树木、高压电塔等,至少某一方向上保证净空,200米内20米以上净空,200-400米内30米以上净空,400-700米以内40米以上净空 | |
| 电磁环境 | 对GPS信号和磁力计不存在明显的干扰 | |
| 气象条件 | 起飞场地能见度 | > 1000m,夜航除外 |
| 起飞场地云高 | > 飞行高度(通常飞机进云不会影响飞行安全,但是如果地面温度在0-10度,此时进云翼面可能会出现结冰,如果空速管结冰则危及飞行安全) | |
| 风速 | < 10m/s | |
| 作业区能见度 | > 2000m,夜航除外 | |
| 作业区云高 | > 飞行高度 | |
| 测区距离 | 距离测区越近越好,地形限制不要超过25公里,否则影响差分数据精度 | |
◎注意:首先确保无人机系统组装完毕,设备通电,基准站已经开机启动并开始记录数据,打开地面站软件,地面站与无人机建立连接。
1.2. 连接RTK基准站
鼠标右键打开“RTK基准数据”,本地基站页面选择对应的基站串口,点击“打开”,下面的数据链路变为绿色则设备已正常连通,右侧GPS通道1会提示RTK固定解,此后收起RTK基准数据面板即可。

1.3. 设置归航点
执行任何非待飞模式之前,必须设置好归航点后才可以执行。飞控每次重新上电启动,归航点将被清空。
◎注意:此保护机制是强制性的,以保证飞行安全。

确定定位后归航点位置点选在起飞点附近;高度100-300米之间,不宜过高;速度24米/秒;半径通常为300米;盘旋方向根据场地条件设置;
升降模式为高度保护(不推荐使用立即升降)
设置:修改好归航点参数后“设置”才能有效;
读取:地面站重启后,如果此过程飞控没有断电可以“读取”之前设置的归航点;
高度保护:切到归航模式后,如果当前高度高于归航点高度,则保持当前高度飞向归航点,如果高度低于归航点高度,则迅速爬升到归航点高度同时飞向归航点;
立即升降:飞行器立即按照最大俯仰角限值进行高度调整;
高度差保护:默认关闭即可。
1.4. 设置临时航点
临时航点的设置同归航点基本一样,但是没有高度保护,所以切换临时航点模式需要注意高度安全;
临时航点循环圈数建议3-10圈,不宜过少,也不宜过多;
临时航点主要用来爬升高度或跟归航点组成8字激活惯导,旋转方向根据需要自行设置。

1.5. 设置任务航线
左侧菜单栏调出航线编辑面板,然后加载提前规划好的任务航线,一共有9个通道,最多能同时加载9个任务航线;

调出飞行高度检查面板,“点选参考起飞点”,然后“高程检查”,检查确认航线高度安全、正确;
◎注意:最好联网状态检查高程,或者离线地图下载了高程数据;参考起飞点一定要点选在真实起飞位置或跟起飞位置处于同一海平面的位置。

任务航线检查完毕,上传飞控,并下载确认。
1.6. 规划降落航线
起飞、降落或保护模式均需要提前做好降落航线规划,否则将无法安全降落。

◎注意:每次飞行之前必须规划降落航线上传飞控并下载确认;
◎注意:请确认无人机处于RTK定位状态再规划降落航线,否则降落精度会存在问题;
◎注意:降落航线应保证无人机沿逆风方向降落;
◎注意:每次起飞或降落前,必须重新确认降落航线是否被正确、合理地设置。
因任务航线、降落航线规划不合理造成的飞行事故均认定为人为事故。
1.7. 起飞前检查向导
本向导将采用自动检测和人工检测相结合的方式,帮助您对飞行器进行飞行前检查,提高飞行器作业可靠性。
请如实完成本向导内检测项目,本向导检测结果不对地面控制软件指令、功能等产生限制作用,如存在作弊操作,将可能造成安全隐患。
本向导在完成检测后,将自动生成检测报告,用于管理和备案。
检测向导中的提示内容并不能涵盖飞行器所有细节及客观突发情况等,故本检测不对飞行器作业效果进行完全保证。
1.7.1. 任务登记
根据任务情况自行填写。
1.7.2. 人工检查
地勤和地面站操作人员配合逐项检查即可,本机型无油箱检查,重心位置出厂已配平。无改装无任务设备时,重心不会变化;
1.7.3. 传感器状态
摇杆连接显示红色,原因为未检测到遥控器,可以忽略;
俯仰角、滚转角应保持在正负1度以内,如果超限,请检查无人机是否水平,如果无人机不是水平放置,起降存在安全隐患;
航向角:检查确认航向角是否正常(可与手机指南针对比),误差超过10度请使用调参软件进行高级磁校准;
1.7.4. 磁罗盘状态
可结合相关仪表盘检查:

绿色:正常;黄色:磁参考超限;红色:磁罗盘干扰;灰色:磁罗盘离线。
确认双通道磁罗盘状态正常,一般误差可通过一键校准解决,此外更换场地请进行一键校准;
确认GNSS定向状态正常;
航向角:检查确认航向角是否正常(可与手机指南针对比),误差超过10度,检查定向天线连接状态,确认正常,请使用调参软件进行高级磁校准;
1.7.5. 摇杆状态
无遥控器,默认“一切正常”,点击“下一步”即可
1.7.6. 执行机构
舵面和电机检查过程中发现异常如有必要可随时“中止动作”

确认折叠桨已展开,旋转无安全隐患,点击“电机依次怠速旋转”,同时观察电机旋转状态有无异常;四个电机也可以分别单独旋转检测,从右前方逆时针方向依次为1.2.3.4号电机;1和3为逆时针旋转,2和4为顺时针旋转。

观察四个电机转速是否接近一致
点击“舵面依次自动检查”,飞控执行检查动作依次为副翼右滚-副翼左滚-升降拉杆-升降推杆-方向右转-方向左转-襟翼(没有襟翼,可忽略),同时关注飞机图标上箭头提示结合现实中飞机舵面变化判断逻辑是否正确;可分别单独检查某一项。






副翼右滚-----副翼左滚-----升降拉杆-----升降推杆-----方向右转-----方向左转
扶好伞舱盖,然后点击“打开伞舱”,确认伞舱盖可以打开,再次扶好伞舱盖,点击“关闭伞舱”,确认关闭完成,检查完毕;
◎注意:请相互配合好,扶好伞舱盖再执行开关伞舱指令,配合不好可能会卡伞舱舵机甚至造成损害;
降落伞不必每次都检查,隔几天检查一次即可,但请务必确认伞舱盖处于关闭位置。
1.7.7. 飞行配置
默认参数如图所示,可适应绝大多数情况,可根据任务详情酌情调整参数。
“下载”可查阅当前飞控设置的参数,修改完“上传”参数才能在本架次生效,断电重启后飞控恢复默认参数。“上传”后如果点击“保存”则飞控默认参数被修改。
1.7.8. 保护功能
检查确认各个保护参数
归航警报值:当动力电压(电压检测1)或智能电池百分比下降到归航警报值时,飞控自动执行归航,返回归航点盘旋等待操作人员指令;
◎注意:此时操作人员可发出指令再次执行任务,但该警报值不再具有保护作用,除非重新修改警报值,达到警报值后再次执行任务出现事故属于严重人为事故;
降落警报值:当动力电压(电压检测1)或智能电池百分比下降到降落警报值时,飞控自动执行降落航线;
◎注意:此时操作人员可发出指令再次执行任务,但该警报值不在具有保护作用,除非重新修改警报值;达到警报值后再次执行任务出现事故属于严重人为事故;
◎注意:当舵机电压(电压检测2)达到降落警报值时,飞控自动执行降落航线,且不可撤销,除非重启飞控;
◎注意:当智能电池与电压检测同时存在时,电压检测不起保护作用;
保护优先级:电压检测2降落警报 > 智能电池或电压检测1降落警报 > 返航警报;
其它参数如图保持默认即可,警报值保护参数修改需使用调参软件,一般不建议更改参数;满电电压50.4V,舵机电压稳定在8.4V左右(浮动在0.3V以内)
1.7.9. 空速计状态
◎注意:空速检查非常重要,必须保证空速数据正确可靠,否则飞行器将无法安全飞行。
正常地面静止状态,空速测试值小于5m/s且为正值,手指堵住空速管进气口,数值能达到10m/s以上,且保持稳定或上升则密封良好,反之则检查连接部分解决问题;

◎注意:系统上电时,若空速管进气口有较大气流,开机自检时可能产生较大干扰误差,这种情况下用手挡住空速口周围且不接触到或堵住空速口,防止空速口受周围气流扰动。然后连续点击按钮四下完成空速清零操作,之后再执行上述空速检查操作;
◎注意:地面静止状态,当微风或无风状态数值比较大时可使用“空速计清零”消除误差,之后再执行上述空速检查操作。
该机型目前仅使用空速1。
1.7.10. 任务载荷
如未搭载相机可略过此步

试拍前“清空POS数据”,将自驾仪之前记录的拍照点信息清除,如果不清空POS数据,不影响设备正常使用,但是数据显示不够直观;
拍照一次:试拍一张,请最少试拍2张;
连拍十次:该指令下等时0.5秒拍10张(由于超过多数相机拍照极限,不建议使用);
开始等时拍照:可以输入指定的时间间隔做拍照测试,有一点需要注意,拍照指令是地面站发出,如果有原因导致软件运行卡顿,可能会出现拍照停顿现象,之后会自己恢复正常。
1.7.11. 油门及震动

检查确认无人机平放,两个背推桨无阻碍,人员避开螺旋桨,按压住飞机后可进行检测,“10%”,“50%”,“100%”,每次检测,飞控油门输出保持5秒钟然后停止,检测过程可随时“中止动作”,紧急情况可使用“立即熄火”。
1.7.12. 就绪确认
“就绪”-“完成”-“确定”-“取消”-“退出”
再次检测或下一架次地面站未退出再次打开飞行检查向导时,使用“重新检查”
“备注”请根据需要自行填写;
“确定”之后会在软件根目录生成一个起飞前检测报告。

1.8. 其它任务设备检查
其他任务设备检查:扫描仪、吊舱等
地图任意位置右键-“舵机任务”-“任务执行”
发送相应指令检测任务设备;

如果无法调出任务执行面板,需进行“任务舵机配置”舵机任务配置见下一节。
1.9. 检查智能电池
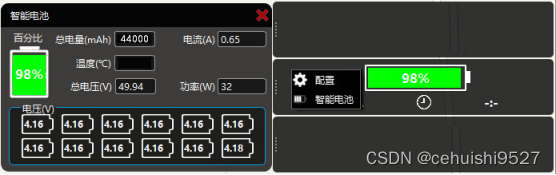
智能电池图标位置右键-“智能电池”,查看确认电池状态正常;
本电池无温度传感器,电池使用温度最好在20度以上,温度过低影响放电性能;
满电电压50.4V,百分比97%以上;
12S电池,单片电压压差在0.1V以内,压差过大可能有安全隐患,当压差达到0.3V时请勿使用;
◎注意:飞行过程中观察单片电压,必须保证单片3.2V以上或总电压38V以上降落,请不要低于3.2V!尤其是冬季;
总电压44V以下不建议执行起飞任务;
没有智能电池,不影响飞机正常使用,此时电量百分比警报值无效;
智能电池信息显示不完整(有百分比),不影响正常使用,电量百分比警报值有效。
1.10. 其它检查项

速度、高度、姿态等
GS: 对地速度应为0;未定位前可能不为0,属正常现象;
VS: 竖直速度应为0,未定位前可能不为0,属正常现象;
AMSL: 海拔高度应为一个稳定值,未定位前可能不稳定,属正常现象;
Pitch:俯仰角
Roll: 滚转角
Yaw: 偏航角
CAS: 当前空速/目标空速
RH: 当前高度/目标高度(相对于起飞点)
转速、油门、定位等
智能电池栏上右键选择“配置”可自由选择显示的信息栏。

旋翼油门
固定翼油门
RPM1:电机1转速监控
RPM2:电机2转速监控
确认双GPS、双磁罗盘、定向天线图标皆为正常绿色
航拍计数:当前POS数据
发动机状态:发动机工作正常
1.11. 飞行器待飞准备
确认飞行器水平放置于起飞跑道或平台上,确认机头朝向方向空域良好,强烈建议机头朝向逆风方向起飞;
检查周边没有大型钢铁物品干扰磁场,没有大功率无线电发射设备干扰航电系统和通讯链路;
确保周边人员安全撤离,飞行器处于操作人员的可视范围内。
1.12. 起飞

将飞行器做好垂直起飞准备工作,确保各执行机构工作正常,双击起飞图标,飞行器多旋翼系统进入怠速状态;
怠速3s以后,飞行器将会自动垂直爬升至 30m 高度;悬停2s;自动逐渐加大固定翼油门至 80%进行水平加速;飞行器将会自动保持当前高度和航向;
当校正空速达到20m/s后,多旋翼动力系统自动停止,飞行器自动进入爬升阶段;飞行器将会沿着当前方向,以11°的爬升迎角进行爬升;
爬升至70m高度后,飞行器自动切入FW归航模式,返回归航点上空进行盘旋;
在操作无人机盘旋爬高时,建议使用临时航点进行爬高。
◎注意:起飞后直到降落整个过程实时关注高度、速度、姿态、电量、航时、磁强计等信息。
1.13. 爬升、激活惯导
临时航点爬高,如有惯导,需要飞机8字激活惯导。
1.14. 开启任务设备
开启扫描仪或打开吊舱。
1.15. 巡航及任务飞行
输入需要进入的航线和切入的航点号(勾选“无限”代表无限循环本航线),循环圈数默认1圈,并确定结束模式为“归航盘旋”。单击“立即执行”,无人机将会进入本航线,并执行航线任务。
如果飞控中航线存储区没有存储对应编号的航线或航点,则飞控会返回错误,并且不会改变当前模式状态。


恢复航线:当无人机正在执行的航线被中断,例如临时执行航点模式,无人机会记录被中断前的目标航线、航点及已飞圈数。
点击“恢复航线”,无人机将会从中断前所记录的目标航线及航点,继续完成航线任务。
例 :当前飞行器正在执行航线 1,目标航点 3。
出现临时任务,命令飞行器进入航点模式,飞向临时航点,执行 3 圈侦查任务。
临时航点任务结束后,飞行器将自动返回航线模式,恢复航线 1,目标航点 3。
1.16. 归航
任务航线完成时,自动或手动进入归航模式。
1.17. 关闭任务设备
关闭扫描仪或收起吊舱。
1.18. 降落航线
根据起降场地、天气等情况酌情调整降落航线。检查风向风速,确认是否需要调整降落航线,如若调整,请确保高度安全并上传飞控;
1.19. 准备降落
调整归航点高度和位置。执行降落前请将归航点高度调整到比降落航线高60米左右,酌情调整归航点位置,以方便角度柔和的进入降落航线,调整归航点时请注意高度安全。
1.20. 降落
无人机作业完在归航点盘旋,准备降落时,切记根据当时风向进行降落航线方向确认,再进行降高执行降落航线;
双击图标执行降落航线,无人机沿降落航线飞行,在到达降落转换点半径范围内(最后一个航点)时自动转换成旋翼模式执行降落。
飞行器到达降落转换点时如果不满足转换要求,将会重新执行降落航线。
成功转换并降落后,飞行器将会自动进入待飞模式。
1.21. 地面静置
如有惯导,无人机需要在地面静置五分钟,然后拷贝惯导数据。
1.22. 飞机断电、拷贝机载数据
确认飞控断电,使用Type-C数据线连接飞控,根据Flight文件夹时间找到该架次数据拷贝出来,也可以等当天外场飞行结束后统一拷贝;
飞控记录数据为DATA文件夹,单个文件夹容量超过400M后依序建立下一个文件夹。
1.23. 静态基站停止记录、拷贝数据
打开千寻手簿,基准站设置—停止
使用Type-C数据线连接基准站,根据提示轻按一下电源键识别为存储设备,选择对应时间段的记录文件拷贝。


1.24. 撤收
有序撤收,不要遗漏设备部件。
2、激光发射器常规使用流程
2.1. 飞行前检查操作流程
激光器默认是通电开机,即连接电源后激光器自动打开状态,该设备是集成了RIEGL激光器,APX-20惯导系统和索尼照相机系统,三者是经过严密的内业解算标定的集合体,所以下面操作都是整体性的。
浏览器打开192.168.0.100,进去惯导界面,里面查看当前卫星状态,惯导激活状态信息(有时间标记戳,2分钟增加一条记录)
进入方式:\\192.168.0.128,我的电脑进入扫描仪,进入工程下,找到当天自动新建的文件夹一般为:210611-071123,子文件夹目录如下:
01-PLANNING
02-INS-GPS-RAW
03-RIEGL-RAW
04-CAM-RAW
05-INS-GPS-PROC
06-RIEGL-PROC
07-PROTOCOL
08-RECEIVED
09-EXPORT
检查文件夹02,里面形成惯导数据,2分钟形成一个文件,说明惯导数据采集记录正常。
检查文件夹03,给地面站作业人员指令,打开激活激光设备,这时候正常会形成一个RXP文件,即激光的原始文件,此时为正常状态,由于激光设备集成了照相机所以此时会伴随相机快门的声音,以设置的拍照时间为间隔拍照。
此时外业激光发射器检查工作完成
2.2. 飞行结束操作流程
查看数据的完整性,进去我的电脑 \\192.168.0.128,查看210611-071123,子文件夹03-RIEGL-RAW,里面有两个RXP文件,其中文件小的为仪器飞行前的检查任务,文件大的为飞行任务,一般大小为几个G,此时静置设备5分钟,完成静态数据的采集工作,复制任务文件。
2.3. 关闭设备
打开RIACQUIRE-ALS,打开DECIVE,打开SHUT DOWN SCANNER关闭设备即可
2.4. 设备参数设置
连接状态下打开RIACQUIRE-ALS,SYSTEM中配置系统的参数,主要是设置频率,设备的频率分为150KHZ,300KHZ,600KHZ,1200KHZ,1800KHZ,根据项目的类型选择,频率低测程远,
配套软件RIEGL点密度计算软件,根据实际的需要选择频率,飞行高度,提前计算测区点云的密度,一般情况1:500的图要求16/m2,1:1000的图要求4/m2,1:2000的图要求1/m2.
3 、空域申请使用流程
申请空域:
①向所在地空军提交申请空域的申请(空军南宁基地参谋部航管气象处)
②取得通过的函《关于划设临时空域供******在贵州部分地区开展无人机巡查飞行的函》
③与作业区域的军方对接工作签订管制协议
④与作业区域的民航对接工作签订管制协议
⑤飞行活动前一日15时前提交飞行计划申请(军方一般是传真、民航一般为邮件或者微信传输)★重点!!!不提交申请第二天无法正常飞行★。
⑥飞行前一小时向军方提出飞行申请,军方一般回复为20-30分钟后再打电话确认是否可以开展当天的飞行任务
⑦因为特殊原因会告知取消当天的飞行任务,正常的话会告知起飞后打电话告知起飞,结束飞行后告知结束飞行任务。
4、数据拷贝流程
4.1. 相机照片
相机存储为存储卡,可以直接插拔拷贝数据,多架次一定要注意数据的拷贝,如果存储卡满了,则相机不再记录数据,导致项目区域无影像资料,从而导致返工。
4.2. 激光数据
进入方式:\\192.168.0.128,我的电脑进入扫描仪进行数据的拷贝,注意是复制,不是剪切,这样可以避免数据拷贝过程中意外退出造成数据的丢失,扫描仪是数据覆盖机制,如果数据满了,新的数据会覆盖旧的数据。
5、内业处理流程
5.1.轨迹结算(POSPac UAV )
- 准备数据:基站数据、静态数据,静态数据为DAT格式,通过“千寻星矩后处理软件”转换为O文件
- 新建工程,导入轨迹数据,导入O文件设基站,解算
- 通过反算获取感必值,然后调整GNSS差值,继续计算,直到达到要求
- 保存工程,导出EO文件,即做正射用的poss,轨迹解算完毕。
-
5.2.点云解算(RIPROCESS)
- 将解算后的轨迹数据导入
- 设置感兴趣区域,即激光发射出多少米后算有效数据,一般设50,也可根据实际情况调整。
- 刷新范围
- 航线分割
- 解算数据,选2、3、4,(task2解码,task3、4给扫描仪地理信息数据,如误删点后重新运行3、4即可。
- 解算完后查看误差情况,然后导出点云,注意,此时点云是WGS84坐标,若要转换为其他坐标需设置七参数进行转换。
- 若要将多个架次拼接,首先将各自的轨迹数据解算,然后导入RIPROCESS,然后进行上述2、3、4、5、6步解算。
















 3818
3818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











