







 本文详细解释了雷达与目标间的距离计算模型,涉及停跳模型下的距离近似、信号处理过程中的匹配滤波和频域表达,重点介绍了Keystone变换如何补偿目标的运动导致的距离徙动问题,以及常见的实现方法。
本文详细解释了雷达与目标间的距离计算模型,涉及停跳模型下的距离近似、信号处理过程中的匹配滤波和频域表达,重点介绍了Keystone变换如何补偿目标的运动导致的距离徙动问题,以及常见的实现方法。
雷达与目标之间的距离可以表示为
R
(
t
)
=
R
0
+
v
t
R(t)=R_0+vt
R(t)=R0+vt,其中
R
0
R_0
R0表示目标与雷达之间的初始距离,
v
v
v为目标的速度,采用停跳模型时,
R
(
t
)
R(t)
R(t)可以近似表示为
R
(
t
m
)
=
R
0
+
v
t
m
R(t_m)=R_0+vt_m
R(tm)=R0+vtm,其中
t
m
t_m
tm表示慢时间。设发射信号为
s
(
t
)
=
a
(
t
)
e
i
2
π
f
c
t
s(t)=a(t)e^{i2\pi f_c t}
s(t)=a(t)ei2πfct,其中
a
(
t
)
a(t)
a(t)为基带信号,
f
c
f_c
fc为载波频率,则雷达接收并下变频处理后的基带信号可以表示为:
s
r
(
t
)
=
a
[
t
−
τ
(
t
m
)
]
e
−
i
2
π
f
c
τ
(
t
m
)
(1)
s_r(t)=a[t-\tau(t_m)]e^{-i2\pi f_c \tau(t_m)} \tag{1}
sr(t)=a[t−τ(tm)]e−i2πfcτ(tm)(1)
其中
τ
(
t
m
)
=
2
R
(
t
m
)
/
c
\tau(t_m)=2R(t_m)/c
τ(tm)=2R(tm)/c表示目标时延。(1)对应的目标回波频域表达式为
S
r
(
f
)
=
A
(
f
)
e
−
i
2
π
(
f
+
f
c
)
τ
(
t
m
)
(2)
S_r(f)=A(f)e^{-i2\pi (f+f_c) \tau(t_m)} \tag{2}
Sr(f)=A(f)e−i2π(f+fc)τ(tm)(2)
波形
a
(
t
)
a(t)
a(t)对应的匹配滤波器的频率响应为
H
(
f
)
=
A
∗
(
f
)
H(f)=A^ * (f)
H(f)=A∗(f),所以
s
r
(
t
)
s_r(t)
sr(t)经过匹配滤波器后的输出信号频域表达式可以表示为
S
M
(
f
)
=
S
r
(
f
)
H
(
f
)
=
∣
A
(
f
)
∣
2
e
−
i
2
π
(
f
+
f
c
)
τ
(
t
m
)
=
∣
A
(
f
)
∣
2
e
−
i
2
π
(
f
+
f
c
)
τ
0
e
−
i
4
π
(
f
+
f
c
)
v
t
m
/
c
(3)
S_M(f)=S_r(f)H(f)=|A(f)|^2 e^{-i2\pi (f+f_c) \tau(t_m)}= |A(f)|^2 e^{-i2\pi (f+f_c) \tau_0}e^{-i4\pi (f+f_c) vt_m/c} \tag{3}
SM(f)=Sr(f)H(f)=∣A(f)∣2e−i2π(f+fc)τ(tm)=∣A(f)∣2e−i2π(f+fc)τ0e−i4π(f+fc)vtm/c(3)
其中
τ
0
=
2
R
0
/
c
\tau_0=2R_0/c
τ0=2R0/c表示目标与雷达初始距离对应的时延。对(3)进行逆傅里叶变换可以得到
s
m
(
r
)
=
p
s
f
[
r
−
R
(
t
m
)
]
e
−
i
2
π
f
c
τ
(
t
m
)
(4)
s_m(r)={\rm psf}[r-R(t_m)]e^{-i2\pi f_c \tau(t_m)} \tag{4}
sm(r)=psf[r−R(tm)]e−i2πfcτ(tm)(4)
其中
p
s
f
(
t
)
=
I
F
F
T
(
∣
A
(
f
)
∣
2
)
{\rm psf}(t)={\rm IFFT}(|A(f)|^2)
psf(t)=IFFT(∣A(f)∣2)表示点散射函数,它是由发射波形的自相关函数决定的,需要注意的是(4)中
p
s
f
{\rm psf}
psf函数中的变量直接设置为距离
r
r
r而不是时间
t
t
t,因为时延
t
t
t和距离
r
r
r之间存在一一对应的关系,所以这边没有进行详细的区分。从(4)可以知道,雷达回波的匹配滤波输出将在时延为
R
(
t
m
)
R(t_m)
R(tm)处形成峰值。由于
R
(
t
m
)
=
R
0
+
v
t
m
R(t_m)=R_0+vt_m
R(tm)=R0+vtm,当
v
=
0
v=0
v=0时,
R
(
t
m
)
=
R
0
R(t_m)=R_0
R(tm)=R0,此时目标与雷达之间的位置保持不变,当
v
t
m
<
Δ
R
/
2
vt_m < \Delta R/2
vtm<ΔR/2,其中
Δ
R
\Delta R
ΔR表示雷达的距离分辨率,目标在相干积累时间内的不存在距离徙动现象。从上面的分析可以看出,当目标的运动速度较快,或者雷达积累时间较长时,可能出现距离距离徙动现象,具体表现为在多个距离单元上均形成目标峰值,此时目标能量分散到多个距离单元上,不能很好地实现积累,因此通常需要进行距离徙动补偿。
Keystone变换是最常用的距离徙动补偿方法,下面简单介绍一下它的基本思想:
从(3)可以看出发生距离徙动的原因是
f
f
f与
t
m
t_m
tm之间的耦合,若能将二者解耦即可实现距离徙动的补偿,所以对(3)式,KT变换采用了变量替换的方法,即令
t
m
=
f
c
f
+
f
c
b
m
t_m=\frac{f_c}{f+f_c}b_m
tm=f+fcfcbm,将该变换代入(3)可以得到:
S
M
(
f
)
=
∣
A
(
f
)
∣
2
e
−
i
2
π
(
f
+
f
c
)
τ
0
e
−
i
4
π
(
f
+
f
c
)
v
t
m
/
c
=
∣
A
(
f
)
∣
2
e
−
i
2
π
(
f
+
f
c
)
τ
0
e
−
i
4
π
f
c
v
b
m
/
c
=
∣
A
(
f
)
∣
2
e
−
i
2
π
f
c
τ
(
b
m
)
e
−
i
2
π
f
τ
0
(5)
S_M(f)=|A(f)|^2 e^{-i2\pi (f+f_c) \tau_0}e^{-i4\pi (f+f_c) vt_m/c}=|A(f)|^2 e^{-i2\pi (f+f_c) \tau_0}e^{-i4\pi f_c vb_m/c}=|A(f)|^2 e^{-i2\pi f_c \tau(b_m)}e^{-i2\pi f\tau_0} \tag{5}
SM(f)=∣A(f)∣2e−i2π(f+fc)τ0e−i4π(f+fc)vtm/c=∣A(f)∣2e−i2π(f+fc)τ0e−i4πfcvbm/c=∣A(f)∣2e−i2πfcτ(bm)e−i2πfτ0(5)
在上面的表达式中有
τ
(
b
m
)
=
2
(
R
0
+
v
b
m
)
/
c
\tau(b_m)=2(R_0+vb_m)/c
τ(bm)=2(R0+vbm)/c,对(5)进行逆傅里叶变换可以得到:
S
M
(
f
)
=
p
s
f
(
r
−
R
0
)
e
−
i
2
π
f
c
τ
(
b
m
)
(6)
S_M(f)={\rm psf}(r-R_0)e^{-i2\pi f_c \tau(b_m)} \tag{6}
SM(f)=psf(r−R0)e−i2πfcτ(bm)(6)
可以得到此时目标只会在
R
0
R_0
R0处形成峰值,峰值位置并不会随着慢时间的变换而变化,所以距离徙动得到了有效的补偿。
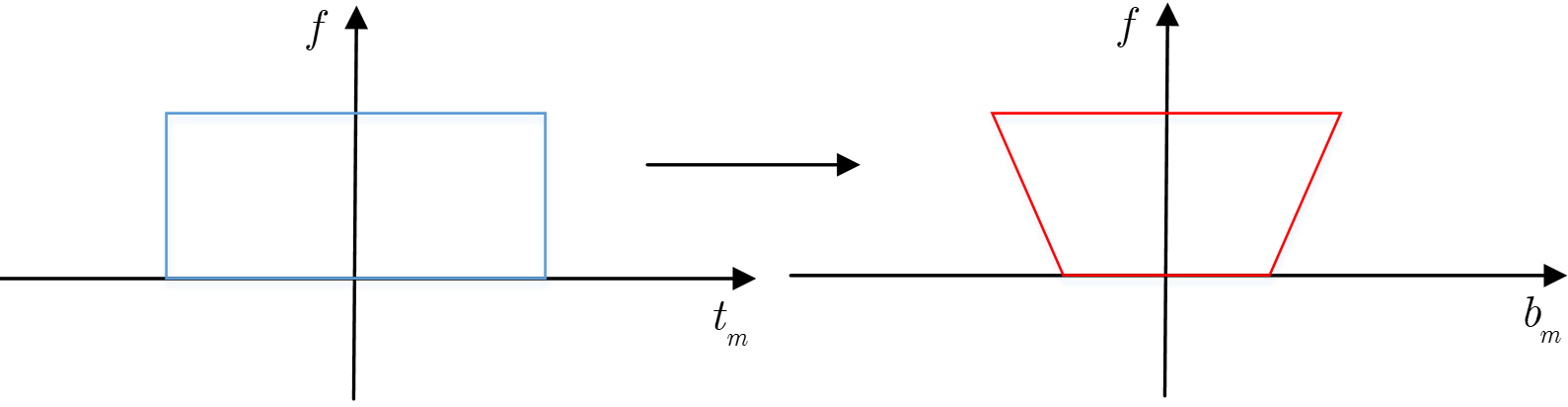
从上面对KT算法的介绍可以看出,KT算法实际上是对慢时间维进行的变换,即将数据由原来的
f
−
t
m
f-t_m
f−tm平面转化为
f
−
b
m
f-b_m
f−bm的平面,其转化的示意图如下图所示,可以看出原始平面中
t
m
t_m
tm的范围不随频率
f
f
f变化,所以呈现矩形的形式,在
f
−
b
m
f-b_m
f−bm平面上,随着频率
f
f
f的增大,
b
m
b_m
bm的范围也逐渐变大,所以
b
m
b_m
bm呈现倒梯形的形式。目前KT算法的常用实现方法主要包括DFT-IFFT算法、sinc函数内插算法、Chirp-Z变换法等,具体可参考文献[3][4][5]。
参考文献
[1] Estimation and Classification of Polynominal-Phase Signals
[2] Hybrid FM-Polynomial Phase Signal Modeling: Parameter Estimation and Cramer-Rao Bounds
[3] 基于Keystone变换的弱目标积累检测及工程实现方法
[4] 基于Keystone变换的微弱目标检测
[5] Keystone变换方法研究
[6] Radar Sidelobe Suppression Using Nearly-Orthognal Waveforms

















 7092
7092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









