







1 硬件
arduino mega r3 开发板

L298N二路直流电机驱动板
2 电路连接
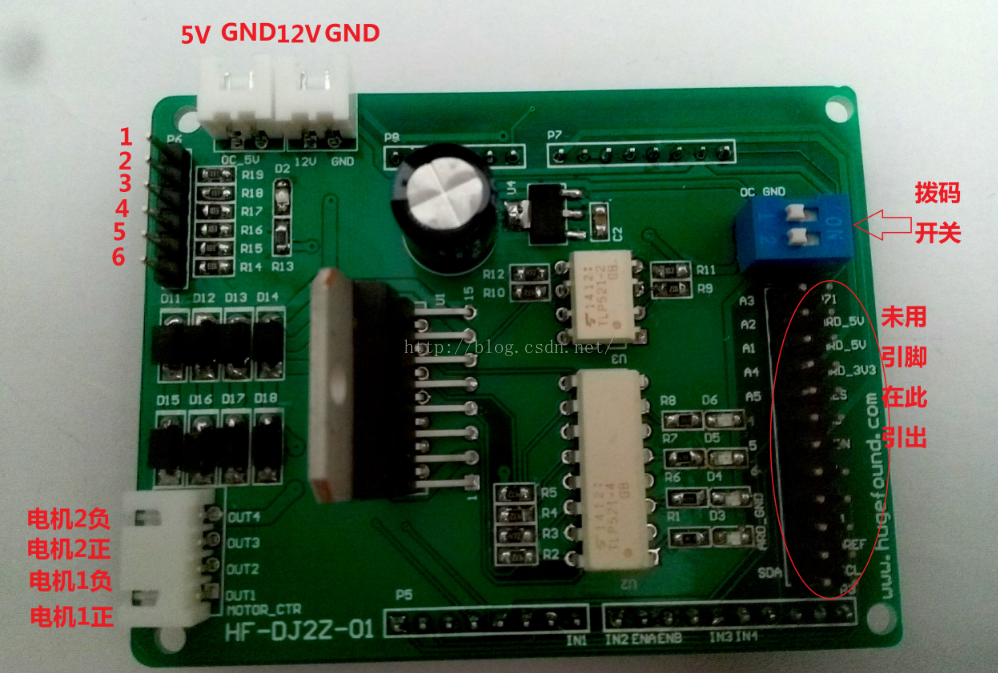
HF_DJ2Z_01为一款光耦隔离型可调速电机驱动板,可完美的插接在arduino mega r3控制板上驱动2路电机,也可以将驱动板上标有IN1、IN2、IN3、IN4、ENA、ENB对应的引脚用杜邦线接出,连接到其他型号的arduino控制板上的输出引脚上使用。本驱动板可以使用光耦隔离达到更好的驱动效果,使用光耦时需要将拨码开关拨到带数字的一端,然后在5V电源接口接入5V电源。
IN1、IN2、IN3、IN4、ENA、ENB为输入引脚,OUT1、OUT2、OUT3、OUT4为输出引脚,接两路直流电机。IN1、IN2、ENA对应OUT1、OUT2连接的电机,IN3、IN4、ENB对应OUT3、OUT4对应的电机。
| 驱动板引脚 |
对应Arduino引脚 |
功能 |
| IN1 |
7 |
电机1输入 |
| IN2 |
8 |
电机1输入 |
| ENA |
9 |
电机1PWM |
| IN3 |
12 |
电机2输入 |
| IN4 |
13 |
电机2输入 |
| ENB |
10 |
电机2PWM |
| 5 |
2 |
电机1编码器中断 |
| < |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6460
6460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









