







 本文探讨了TR室内定位算法,利用时间聚焦和空间聚焦特性提高定位精度至厘米级别。通过建立离线数据库,分析TR的时间反转定义和谐振因子,结合匹配滤波器原理,阐述了TR在室内定位中的应用及其与匹配滤波器的关系。
本文探讨了TR室内定位算法,利用时间聚焦和空间聚焦特性提高定位精度至厘米级别。通过建立离线数据库,分析TR的时间反转定义和谐振因子,结合匹配滤波器原理,阐述了TR在室内定位中的应用及其与匹配滤波器的关系。
1. 前言
刚来实验室的那段时间,我的导师浩川老师让我研究Ray Liu教授所做的室内定位的研究。由于后来决定读博之后,浩川老师给我重新规划了方向,因此室内定位对于我而言算是一个课外扩展的研究方向吧。学习这个也有一段时间了。刚好晚上睡不着,躺在床上也很无聊,于是跑到实验室写点东西,算是对之前学习的一个阶段性总结吧。
随着无线通信技术尤其是小区技术的发展,定位算法在精度与应用上得到了显著的提高。相对于室外复杂的环境,室内环境变化相对缓慢。另一方面,智能家具和机器人产业的兴起,也迫切需要提出较高精度且易于实现的定位算法。
由于室内环境存在着丰富的散射和绕射,这给定位算法精度的提高增加了难度。传统的基于到达时间(Time of Arrival)和到达角度(Angle of Arrival)以及接收信号强度(Received Signal Strength)的定位算法在精度上只能够达到米级别,无法进一步突破。
Ray Iiu团队在文献[1]中提出了将TR技术应用于室内定位算法之中;在文献[2]中验证了TR技术相对于传统的利用RAKE接收机的通信系统具有功耗低、干扰少、多径增益强等特点; 在文献[3]中,提出了基于WIFI的时间反转室内定位(Time-Reversal Indoor positioning System)算法,将定位精度提高到0.5cm。
2. TR室内定位算法简介
近代声学发展了源于光学的相位共轭成像法[4],之后连续的相位共轭法又被演变成时间反转方法。目前大量的TR技术应用于水声通信、医疗探伤等工作领域。
由于室内环境复杂,存在这丰富的散射和绕射,因此不同的位置之间的信道是独一无二的。利用TR技术的时间聚焦和空间聚焦的特性,在仅使用一个信号接入点(Access Point AP)的条件下,可以将室内定位算法的精度提高到厘米级别。
TR室内定位算法主要分为建立离线数据库和匹配在线数据两个环节。在离线数据库的建立过程中,如图1所示,选定一块实验区域,将该区域划均匀划分为 N×N 个网格,通过将移动终端TD放到每一个网格上,发射脉冲信号,AP接受TD发送的信号,得到该TD到AP的信道冲激响应 hi ,图中绿线部分表示 hi 的抽头路径,由于室内环境存在丰富的散射和绕射,因此TD所在的每一个位置到AP的信道冲激响应(Channel Impulse Response CIR)都是不同的,这样重复可以得到整个指纹网络 D={
hi} (也就是离线数据库)。文献[1]中由实验验证了室内环境下信道的互易性以及时间平稳特性。
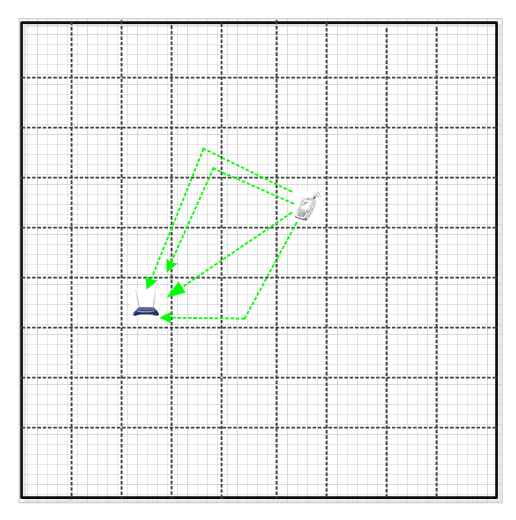
图1:离线数据库建立示意图
在线数据的匹配环节,假定TD在 i(i∈[1,N2]) 位置上,发射脉冲信号,AP接受TD发送的信号,经过时间反转,并与离线数据库中的数据进行匹配,从离线数据库中选择出最为匹配的信道CIR,而该CIR所对应的位置,即为估计位置。表示如下
其中 η 表示TR谐振因子。
3. TR的时间聚焦和空间聚焦特性
3.1 TR的时间聚焦特性
L 长的序列
由于多径效应和延迟,信道的冲激响应可以表达如下
序列 h[k] 与该序列的时间反转序列 g[k] 的卷积如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3900
3900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









