







版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接
四元数(Quaternions)是由爱尔兰数学家汉密尔顿(William Rowan Hamilton,1805~1865)在1843年提出来的数学概念,它将复数所描述的三维空间拓展到四维空间,可以看做是四维空间里的一个向量,也可以称为超复数。四元数的运算法则支持加、减、乘等运算。四元数主要包含四个元素q0、q1、q2、q3,且均为实数。四元数的形式可以写成式:

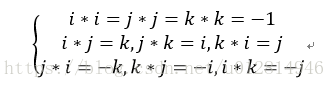
并且
方向余弦矩阵DCM(用四元数表示)为:

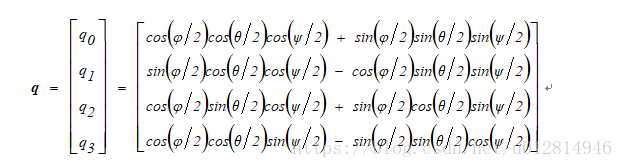
欧拉角——>四元数
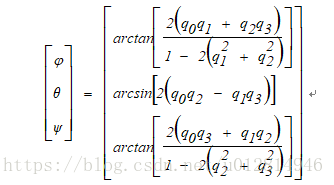
四元数——>欧拉角(roll、pitch、yaw):
① 可以避免万向节锁现象;
② 只需要一个4维的四元数就可以执行绕任意过原点的向量的旋转,方便快捷,在某些实现下比旋转矩阵效率更高;
③ 可以提供平滑插值;
四元数旋转的缺点:
① 比欧拉旋转稍微复杂了一点点,因为多了一个维度;
② 理解更困难,不直观;
本文为博主自己一些学习小总结,不免有些错误,还望发现者积极指正,互相交流学习。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









