






 本文介绍在大型地图中优化A*寻路算法的方法,包括使用优先队列管理可搜索节点、设置搜索深度限制避免长时间卡顿、通过增大地图瓦块减少节点数量、采用多线程并行寻路以及将地图分块进行逐段寻路等策略。
本文介绍在大型地图中优化A*寻路算法的方法,包括使用优先队列管理可搜索节点、设置搜索深度限制避免长时间卡顿、通过增大地图瓦块减少节点数量、采用多线程并行寻路以及将地图分块进行逐段寻路等策略。
-
搜索优化:
小技巧:
1.openList(用于存放可以搜索的点)使用优先队列来实现。
优先队列(小顶堆):插入一个点的复杂度为O(logN),取出一个最值点复杂度为O(1)
2.深度限制:有时要搜的路径非常长,利用A*算法搜一次付出的代价很高,造成游戏的卡顿。那么为了保证每次搜索不会超过一定代价,可以设置深度限制,每搜一次则深度+1,搜到一定深度限制还没搜到终点,则返还失败值。
针对大地图优化:
1.把地图瓦块变大减少节点数量。
2.多线程寻路(适用于多个角色同时寻路)。
3.把大地图分块,分成n个小地图:
如果起点和终点相隔几个小地图,那么寻路流程如下:
step1:根据起点和终点的方向算出走出当前小地图出口点,用A*寻路到出口点。
(注:当前小地图出口点也就是要经过的下一个小地图的入口点)
step2:让角色向下一个小地图的入口点移动,(移动的过程中可以继续寻下个小地图的出口路径,或者到达出口点后再寻路)
step3:若下一个小地图不是终点所在的地图,那么把这个入口点作为起点重复step1:根据入口点到终点的方向计算出,当前小地图的出口点,用A*找到出口点的路径。
若一个小地图是终点所在小地图那么就再用A*寻路到终点即可。
可以走到每个小地图的入口点后再对这个小地图的出口寻路
4.网格地图简化成路标形式(减少网格节点)
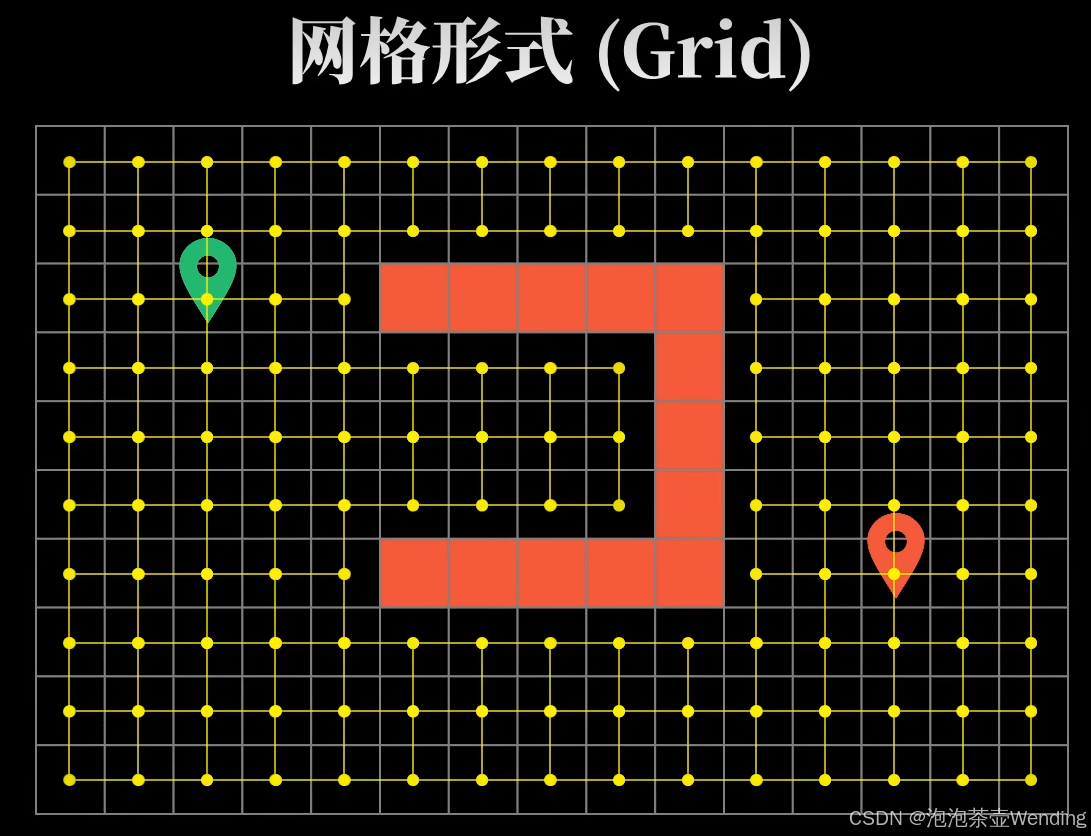
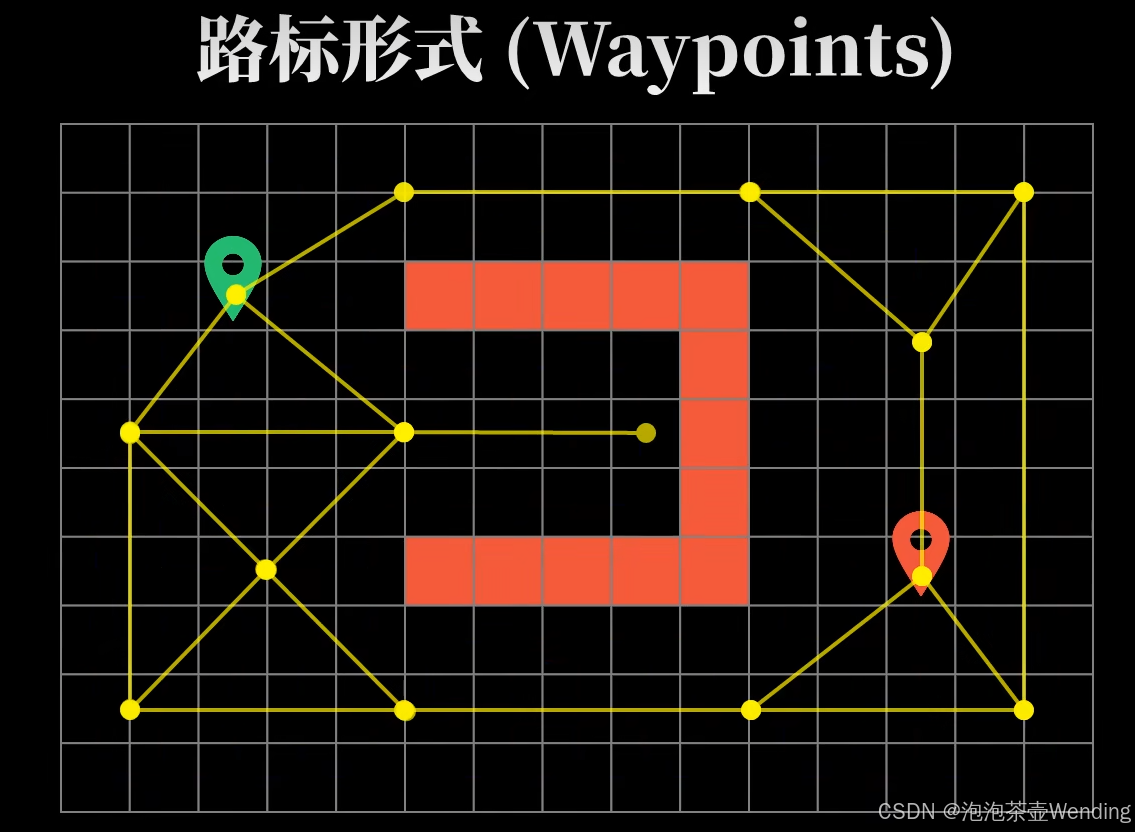
注:变成路标形式后每个节点之间的路径不再是1了,而是节点之间的实际距离

















 1314
1314

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









