







零、参考资料
CANdb++从安装到使用-CSDN博客
使用CANdb++创建DBC文件详细指引(小白看完都会)-CSDN博客
一、纯电动汽车结构与原理
1. 纯电动汽车基本构成
动力来源来自于车载电源; 不需要离合器和变速器;由调速系统改变电动机的转速即可实现。
三电系统:电池系统、电机系统、电控系统。
1-1 电源系统
电源系统包括:动力电池、电池管理系统、车载充电机、直流转换器

动力电池:电芯——>模组——>电池包
电池管理系统(BMS):负责监控和管理电池的状态,以确保安全、高效和长寿命的运行。主要功能包括:电池物理参数实时监测、电池状态估计(SOC)、在线诊断与预警、充放电与预充控制均衡管理、热管理。
车载充电机(OBC):将外部电源提供的交流电转换为电池所需的直流电。
1-2 电机(电驱)系统
电驱系统是电动汽车的核心,一般由电机、电机控制器、减速器和机械传动装置组成。
驱动电机负责将电能转换为机械能、以驱动设备的运动。
电机、电机控制器和减速控制器的三合一电驱动系统。
逆变器:将电池提供的直流电转变成电机所需交流电,改变交流电的频率和幅值来控制电机的转速和扭矩。
减速器:将电机的高转速转换为车轮所需的较低转速,同时增加输出扭矩。减速比是指传动系统中输入轴(通常为电机轴)与输出轴(通常为驱动车轮的轴)之间的转速比。通过减速比,可以将电机的高转速、低扭矩特性转化为适合驱动车辆的低转速、高扭矩输出。
电驱系统控制逻辑,VCU给MCU发送目标扭矩指令,BMS给MCU提供达到目标扭矩所需电能。
1-3 电控系统
电控系统包括:车辆控制单元、电机控制器、电池管理系统、能量管理系统、传感器和执行器、通信网络。
2. 纯电动汽车电控原理
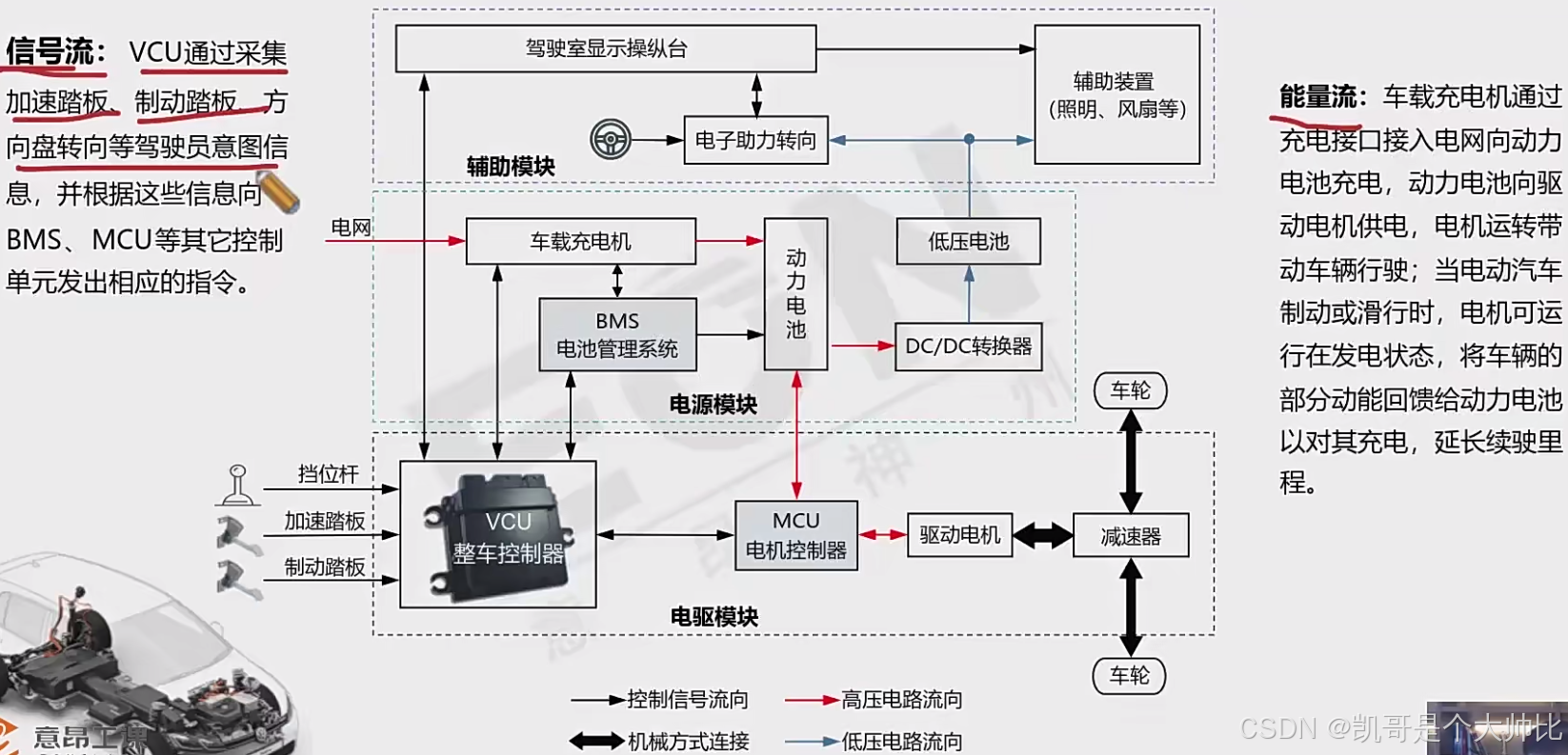
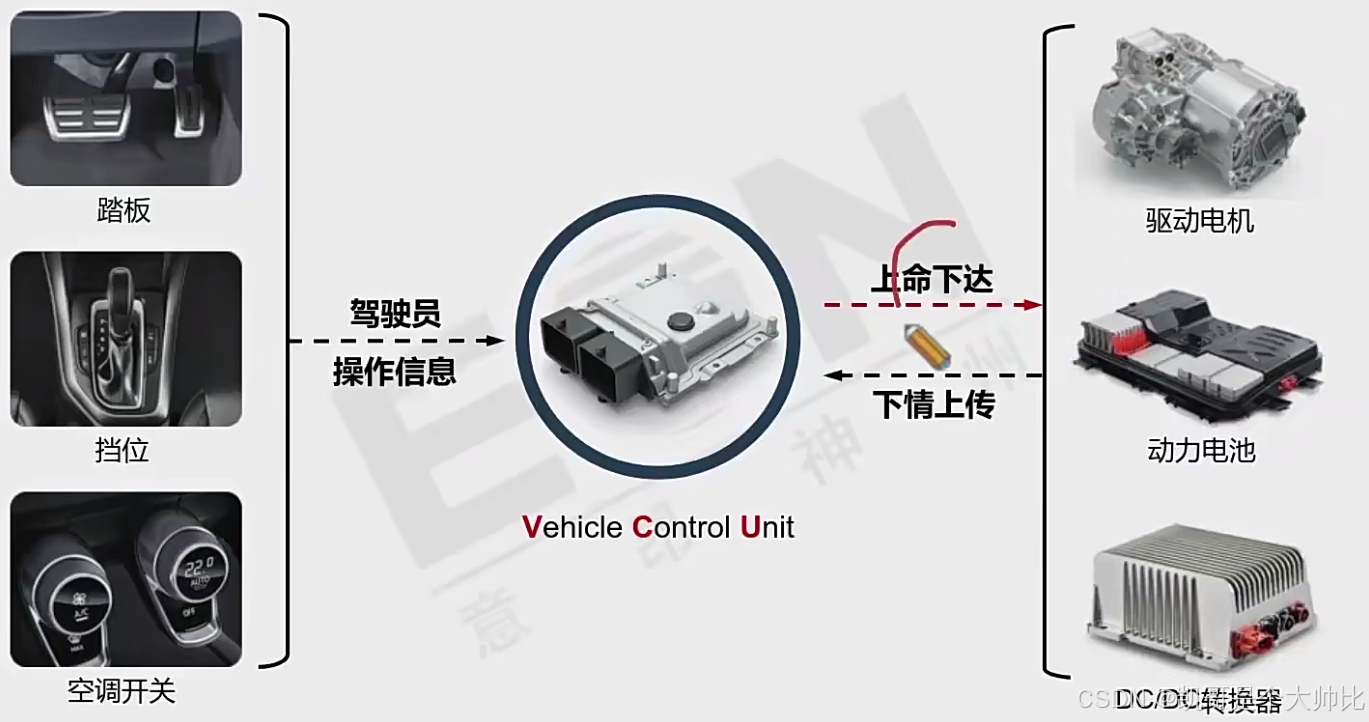
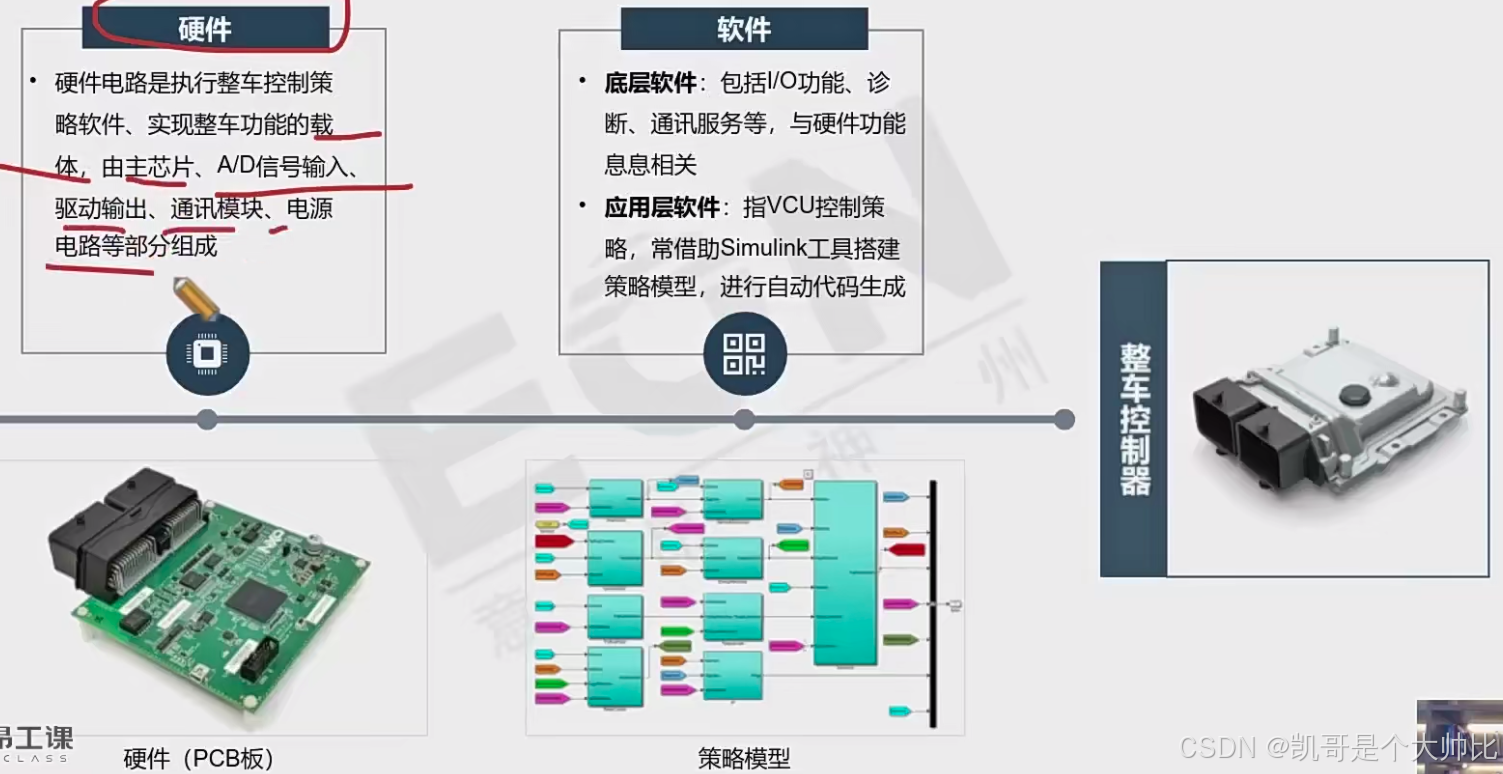
3. 纯电动汽车电控单元(VCU)

二、整车CAN总线网络
1. CAN总线简介
CAN是控制器局部网络,是一种高效、可靠的串行通信协议。
CAN总线连接特点:传输速度快,更少的线束,节省空间,相关控制器可共用传感器。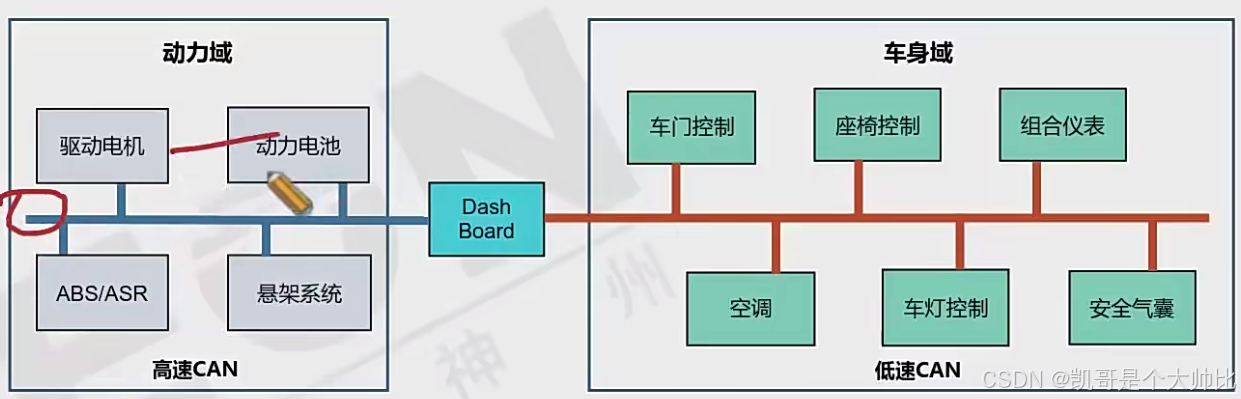
2. CAN通讯机制
2-1 CAN节点
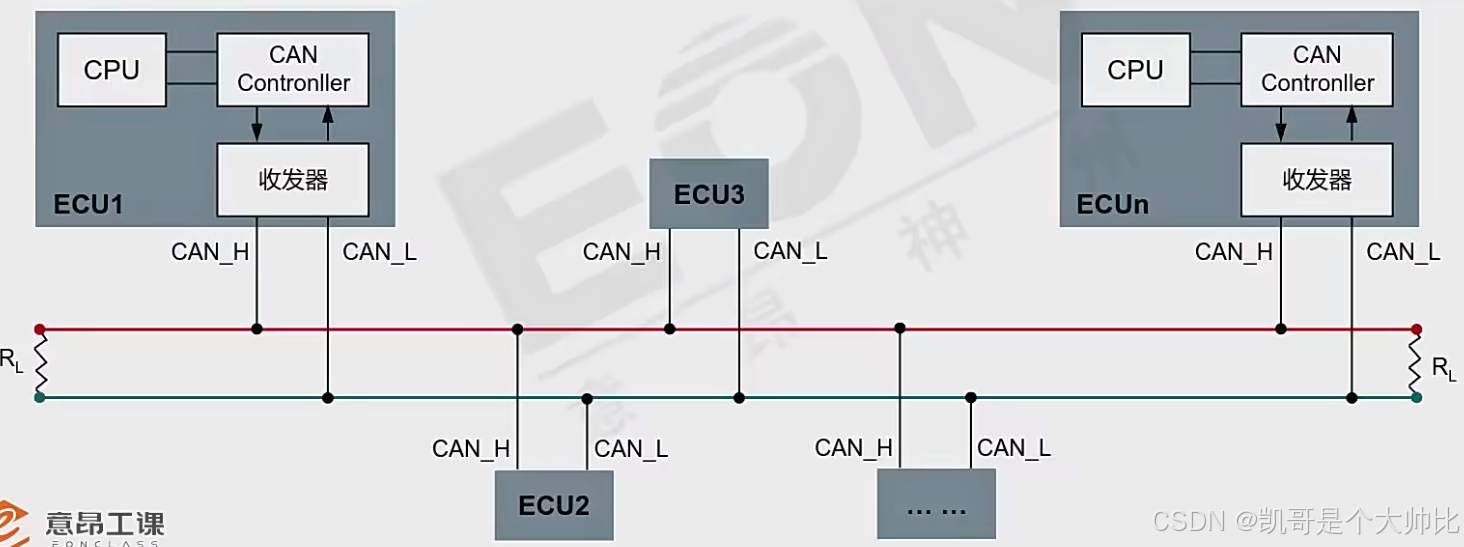
CAN节点是指连接到CAN总线网络上的设备,它们能够发送和接收CAN消息。每个节点通常由CAN收发器、CAN控制器、主控CPU组成。
CAN信号传输的物理介质为屏蔽双绞线,分别为CAN_H和CAN_L,相应ECU的管脚引线分别用CAN_H和CAN_L表示。
2-2. CAN节点的组成
- 微控制器(MCU):负责处理CAN协议的数据帧;执行应用程序逻辑,如数据采集、处理和控制,通常内置CAN控制器模块,支持CAN协议的实现。
- CAN收发器:将MCU的逻辑信号转换为CAN总线的差分信号;负责物理层的信号传输,确保信号的完整性和抗干扰能力。
- 电源:为MCU和CAN收发器提供必要的电源;通常需要5V或3.3V电源。
- 连接接口:CAN_H和CAN_L:用于连接到CAN总线的双绞线;为了提高抗干扰能力,减少回波反射在总线的两端各接一个120Ω的终端电阻。RL电阻不能放置在ECU中,以避免其中一个
2-3 CAN总线上差分信号传输
CAN总线使用两根线(CAN_H和CAN_L)进行差分信号传输,这种设计提高了抗干扰能力和信号的可靠性。CAN控制器通过检测这两根线之间的电位差来判断总线的状态。
差分信号的优点:抗干扰能力强,由于CAN_H和CAN_L同时受到的外部电磁干扰基本相同,差分信号可以有效抵消这些干扰。信号完整性高,差分信号传输可以在长距离和复杂环境中保持较高的信号完整性。
2-4 CAN信号状态判断
CAN总线的信号状态主要有两种:显性(Dominant)和隐性(Recessive)。
显性状态:当CAN_H和CAN_L之间的电位差较大时,总线处于显性状态;通常,显性状态对应于逻辑“0”;在显性状态下,CAN_H电压高于CAN_L电压。
隐性状态:当CAN_H和CAN_L之间的电位差较小时,总线处于隐性状态;通常,隐性状态对应于逻辑“1”;在隐性状态下,CAN_H和CAN_L的电压接近相等。
2-5 CAN信号的发送与接收
发送过程:CAN控制器将CPU传来的信号转换为逻辑电平(0或1)。CAN收发器接受到逻辑电平之后,再将其转换为差分电平输出到CAN 总线上。信号——>逻辑电平——>差分电平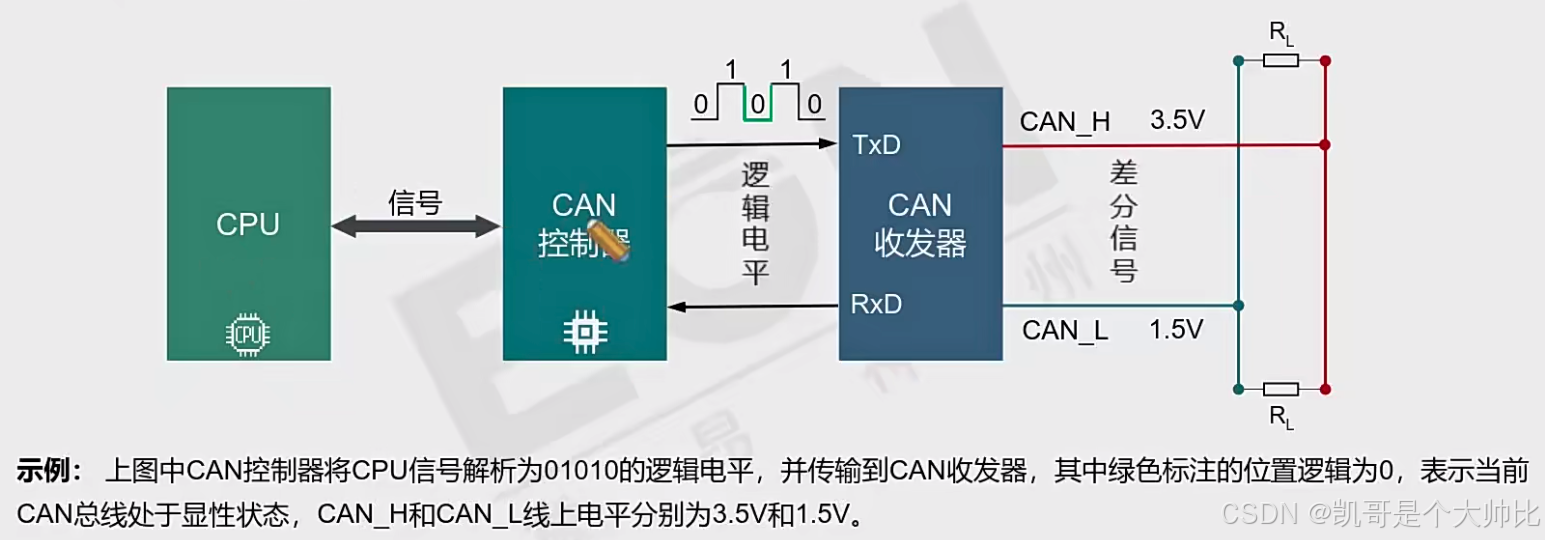
接受过程:CAN收发器将CAN_H和CAN_L线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。差分电平-->逻辑电平-->信号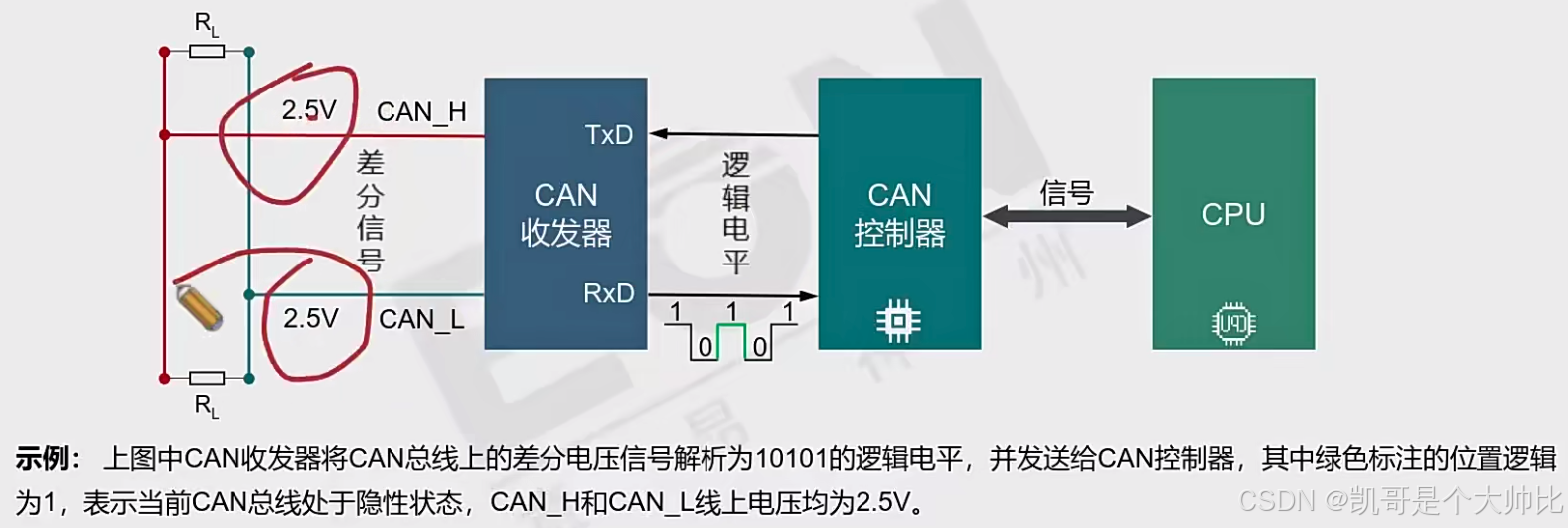
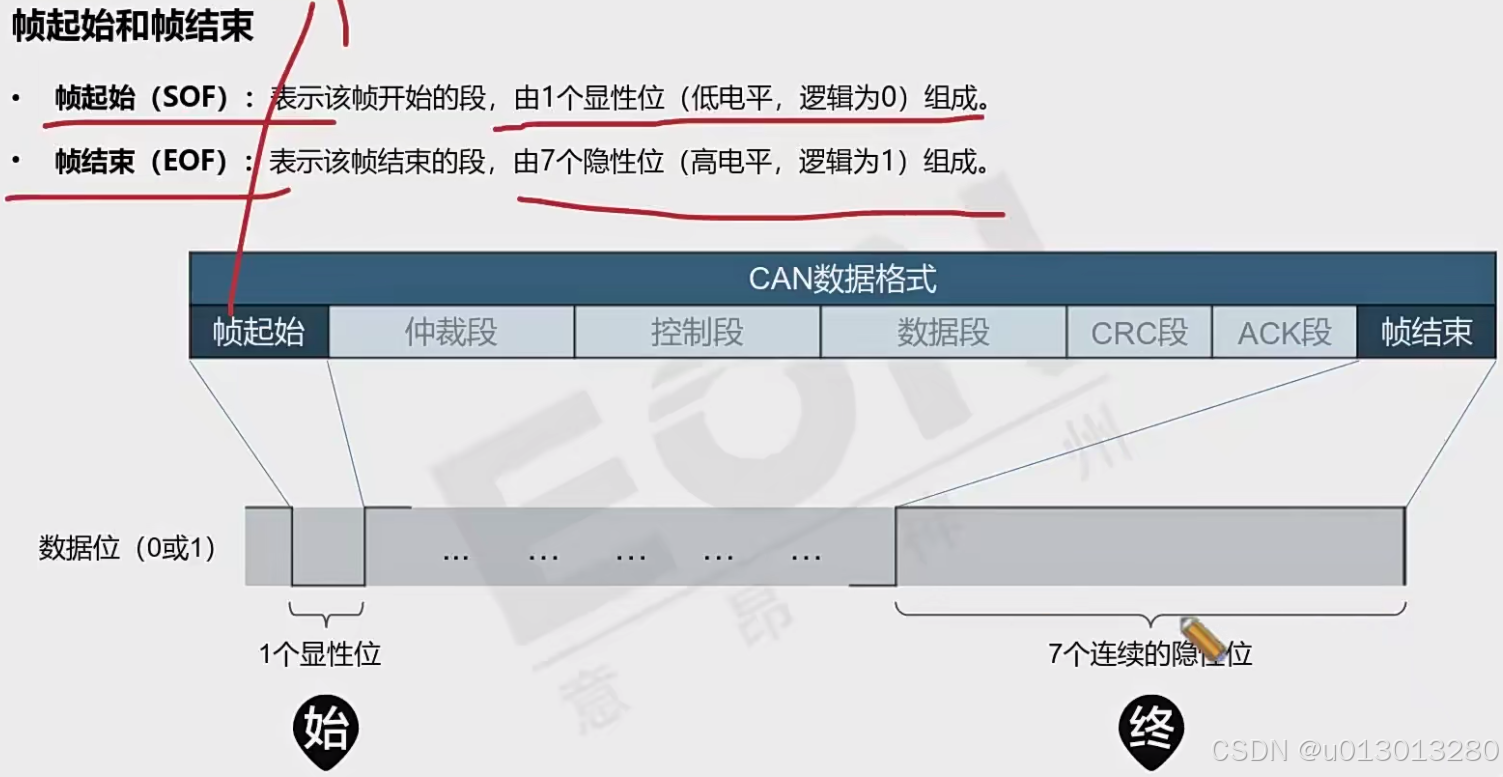
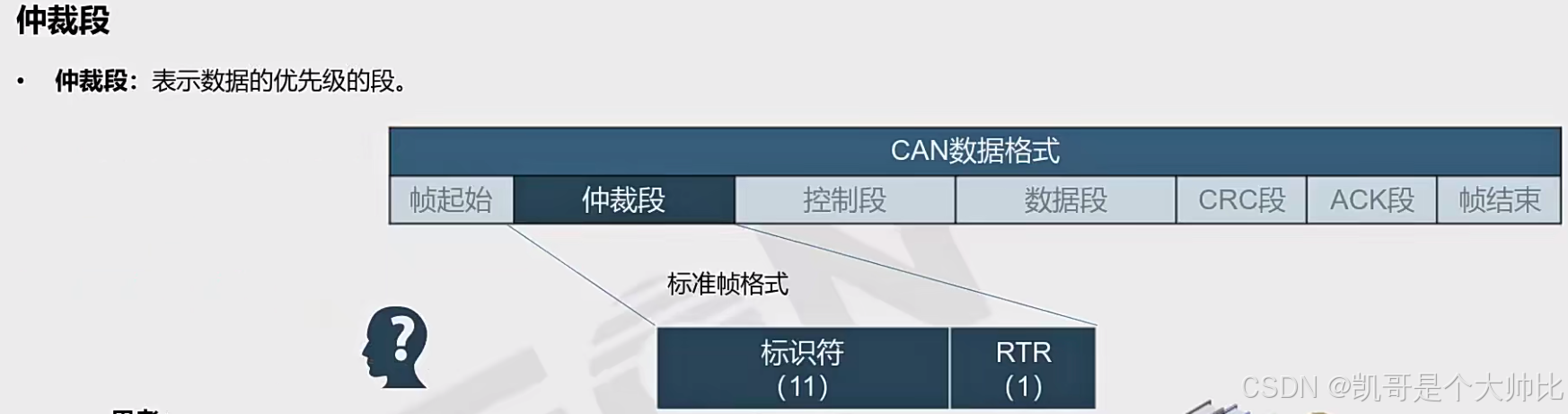
3. CAN数据格式
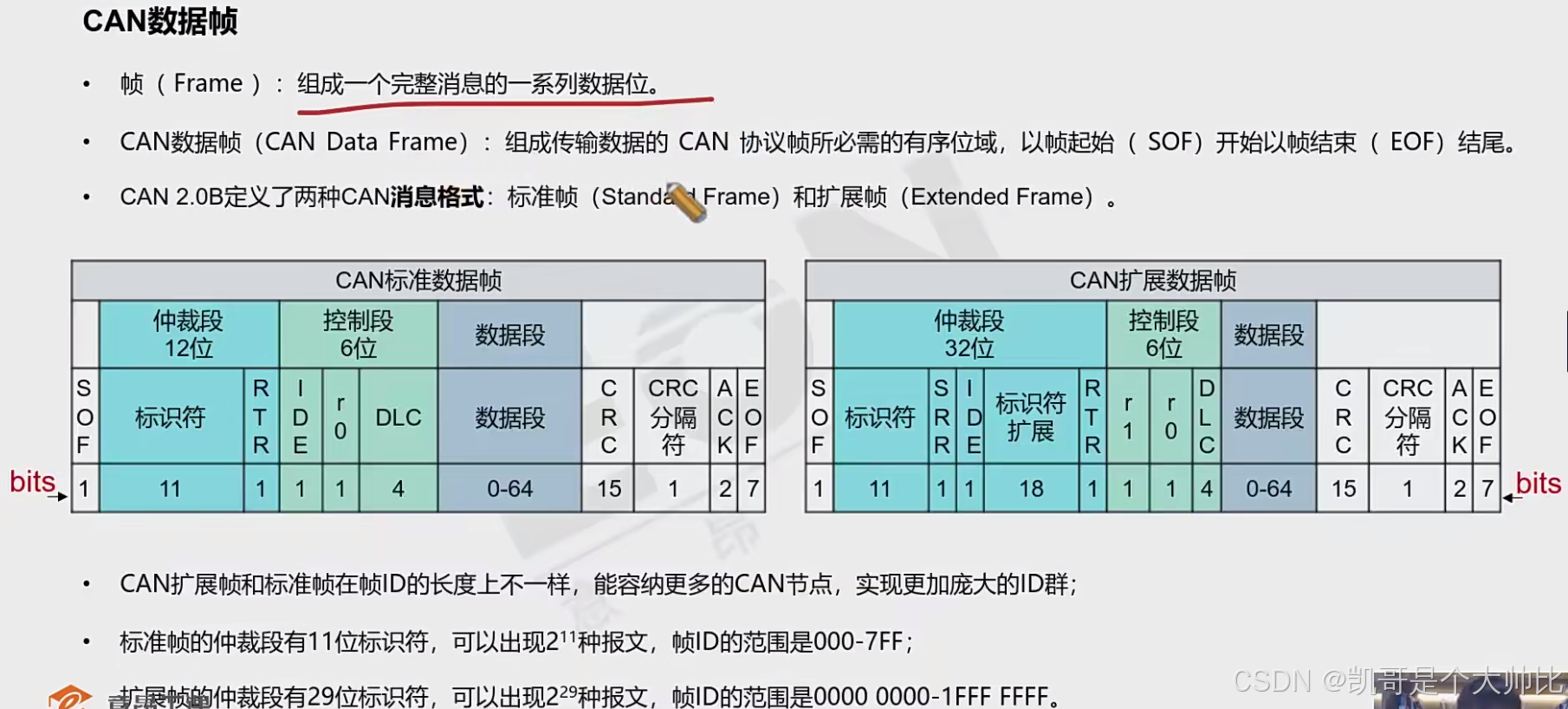
标准帧与扩展帧的区别:在仲裁段的标识符扩展。
多个节点同时发送报文产生访问冲突,标识符的显性信号(逻辑0,压差不为0)将覆盖隐性信号,实现总线仲裁。 帧ID越小,报文优先级越高。 帧ID即标识符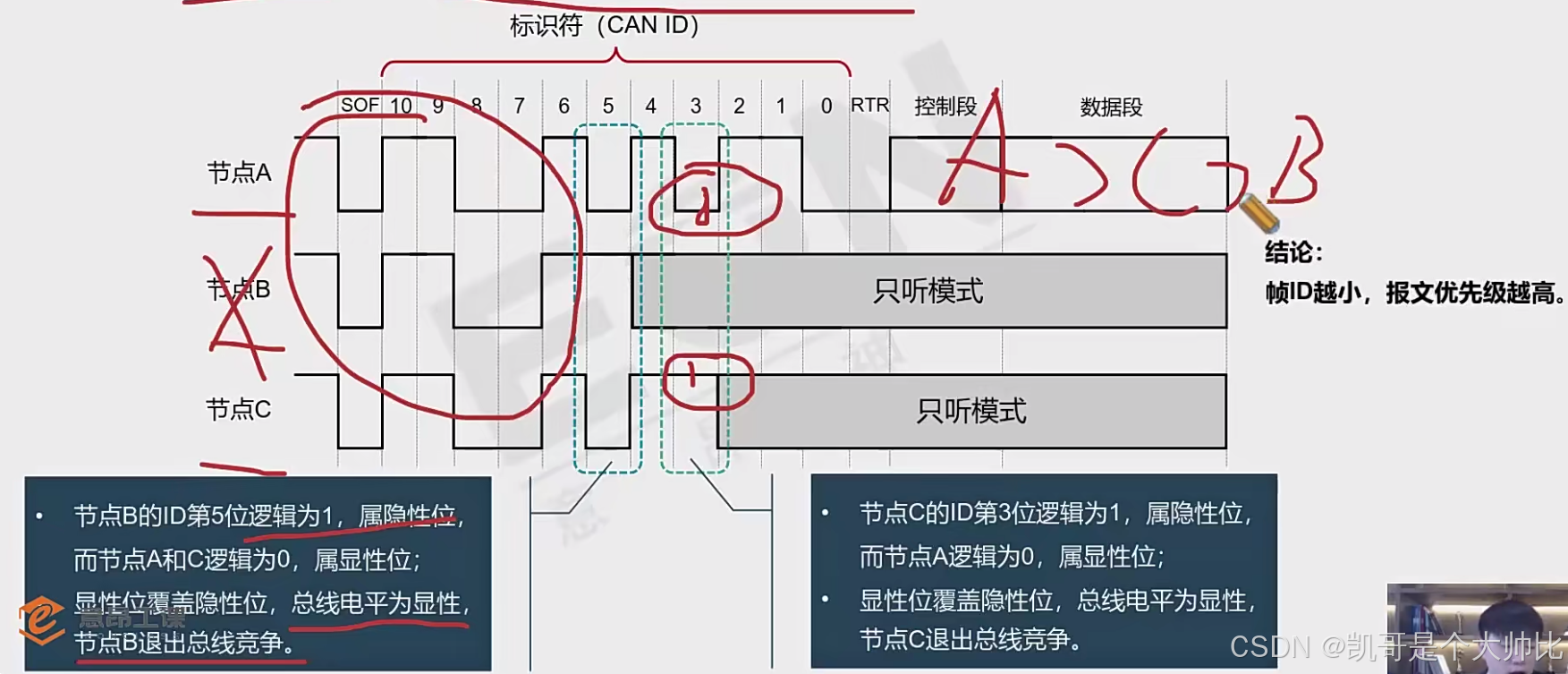
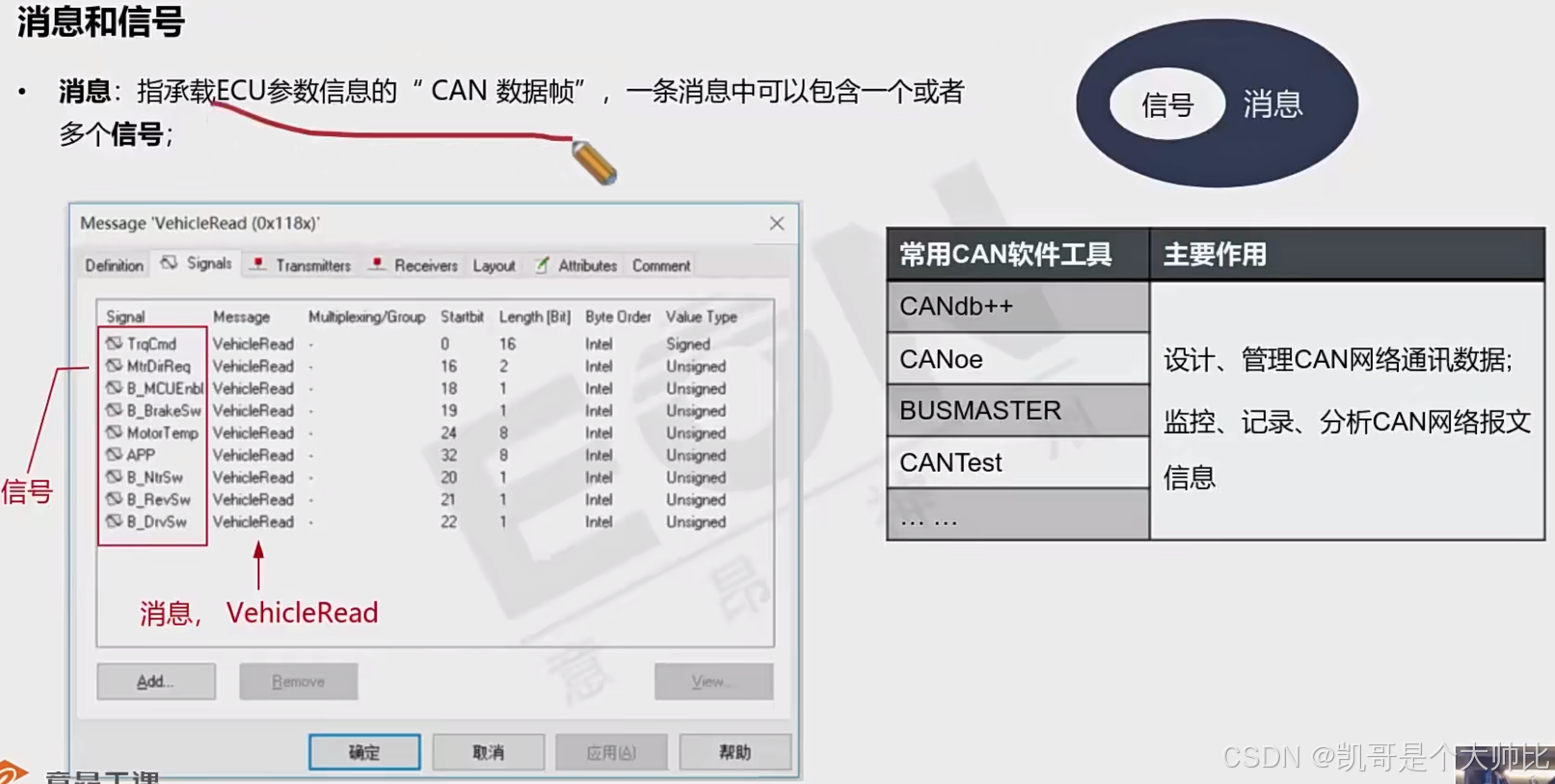
3-1 数据帧、消息与信号
- 数据帧是物理传输单元:数据帧是CAN总线上传输的实际结构,包含了所有必要的信息字段。
- 消息是逻辑传输单元:消息通常与数据帧同义,指的是通过数据帧传输的完整信息。
- 信号是数据元素:信号是嵌入在消息中的具体数据元素,用于表示具体的物理量或状态。我们可能将雨刷器开关和灯开关两个信号放在一个数据帧中。
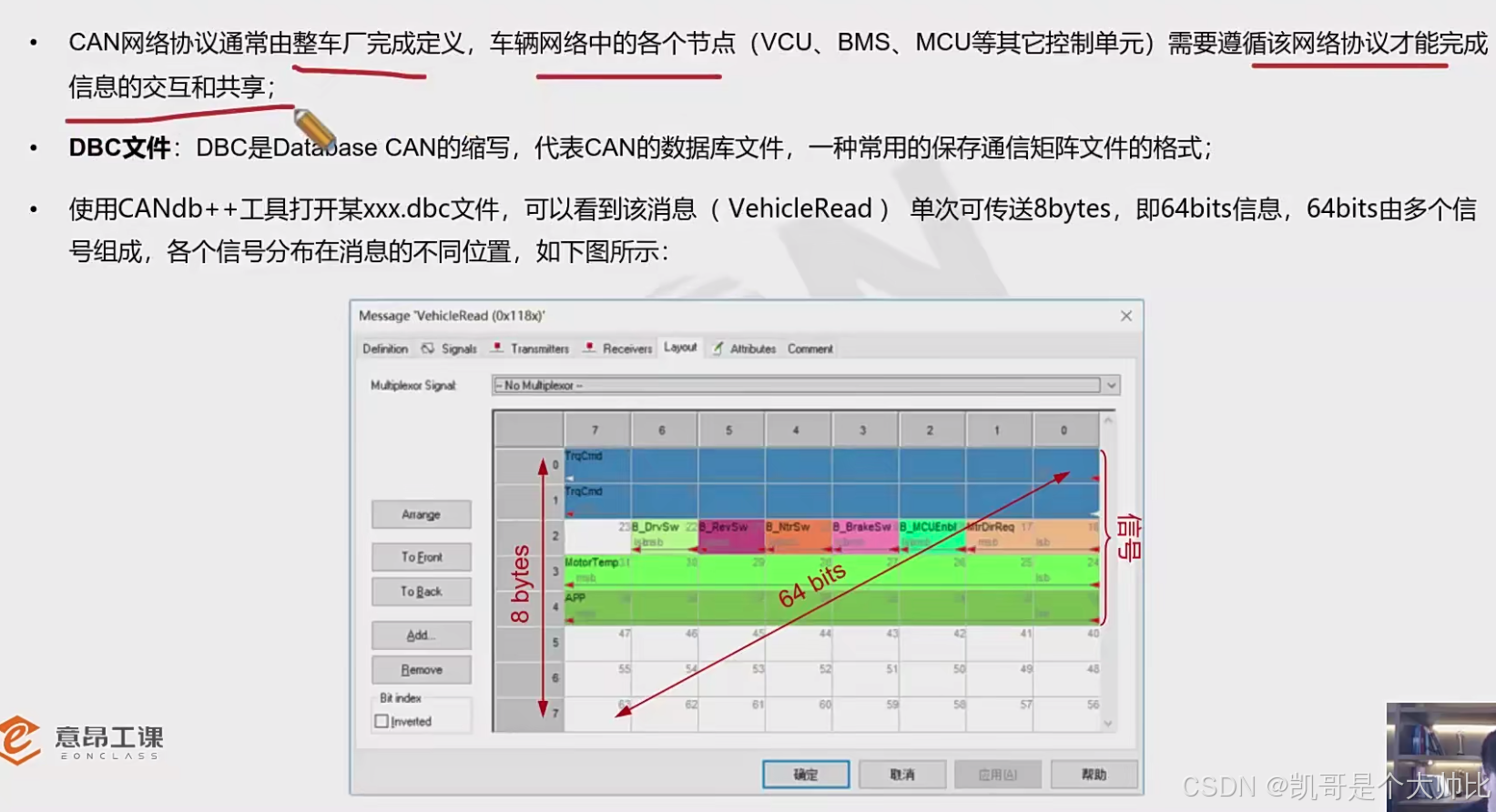
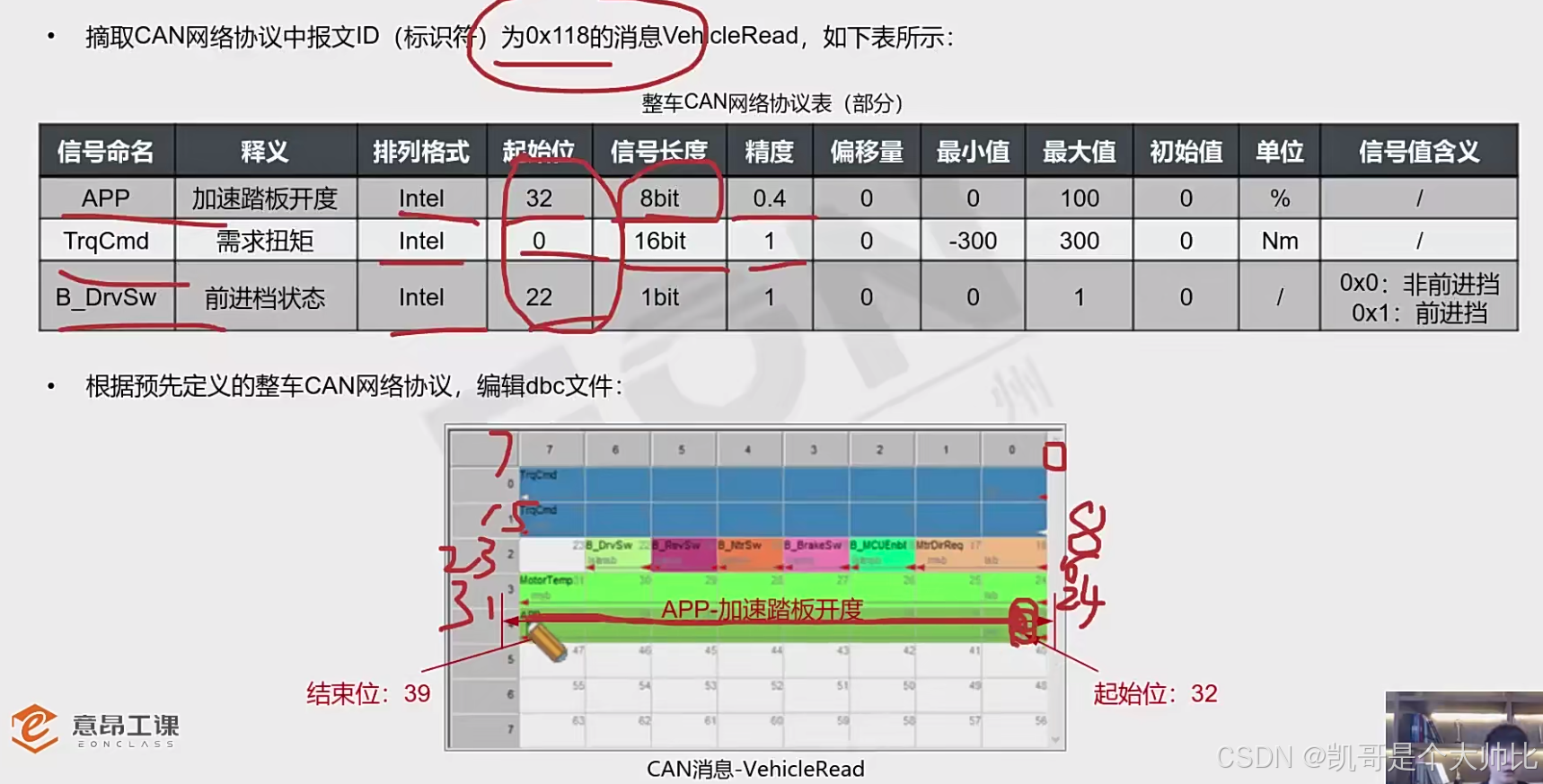
4. CAN网络协议
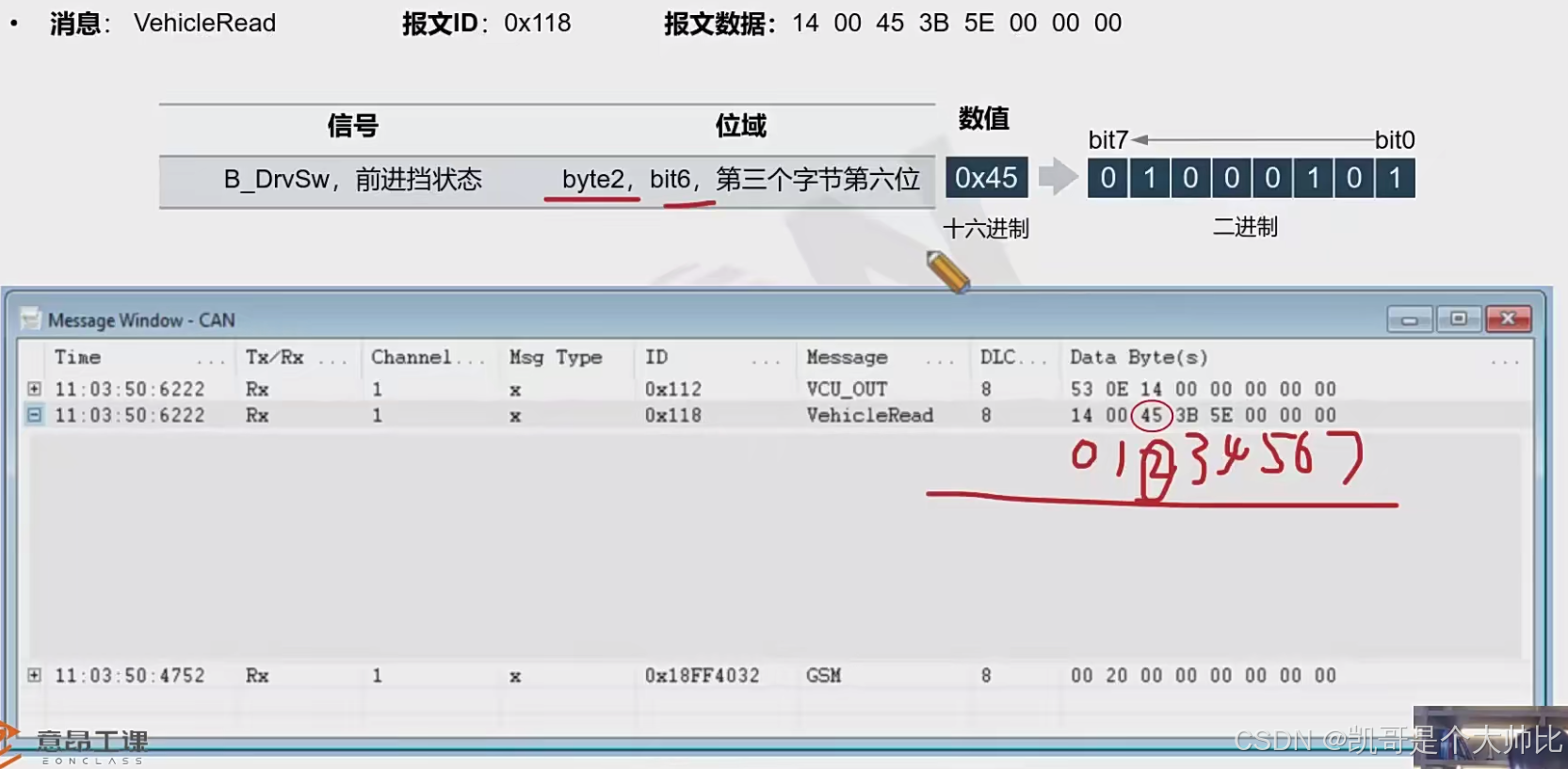
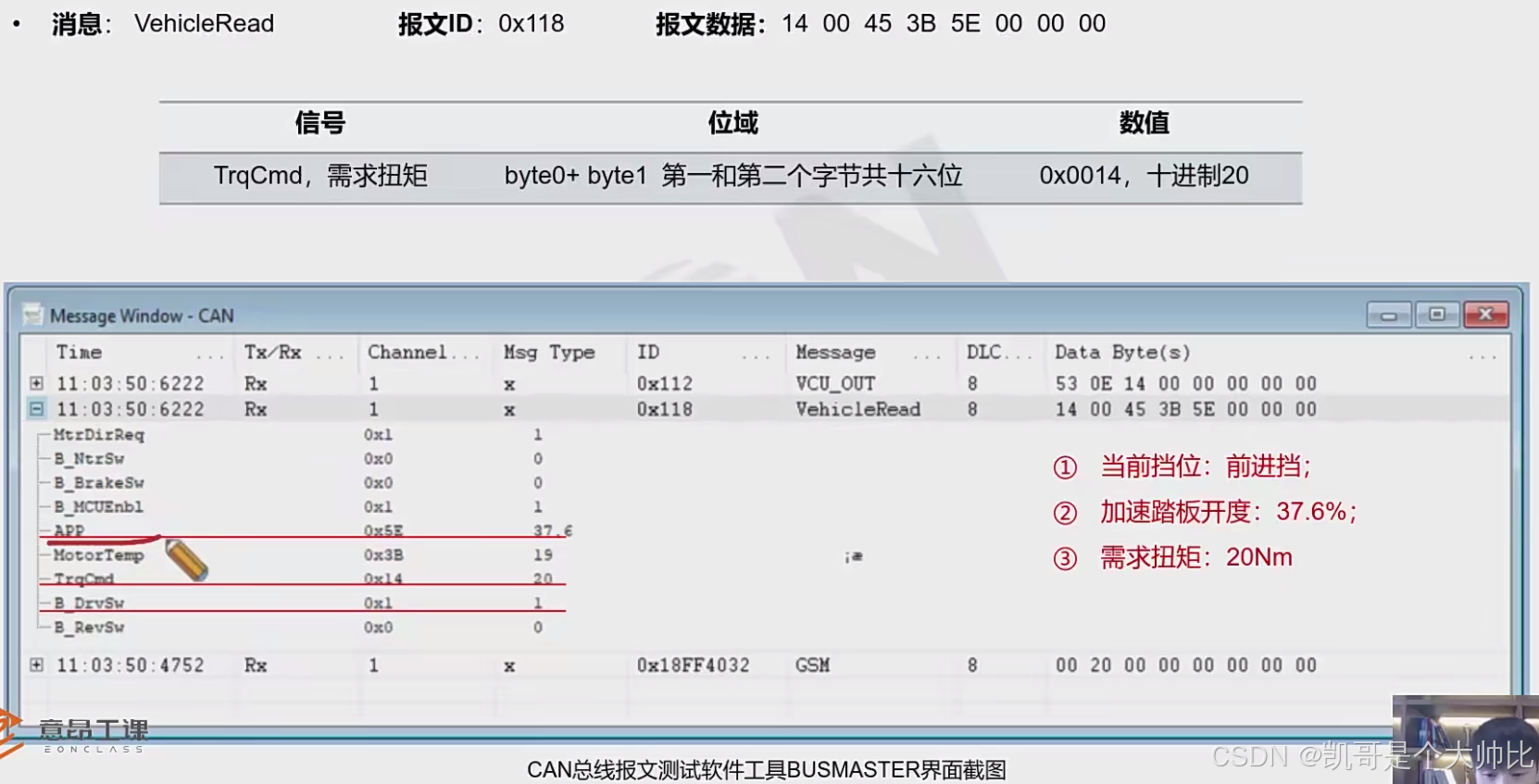
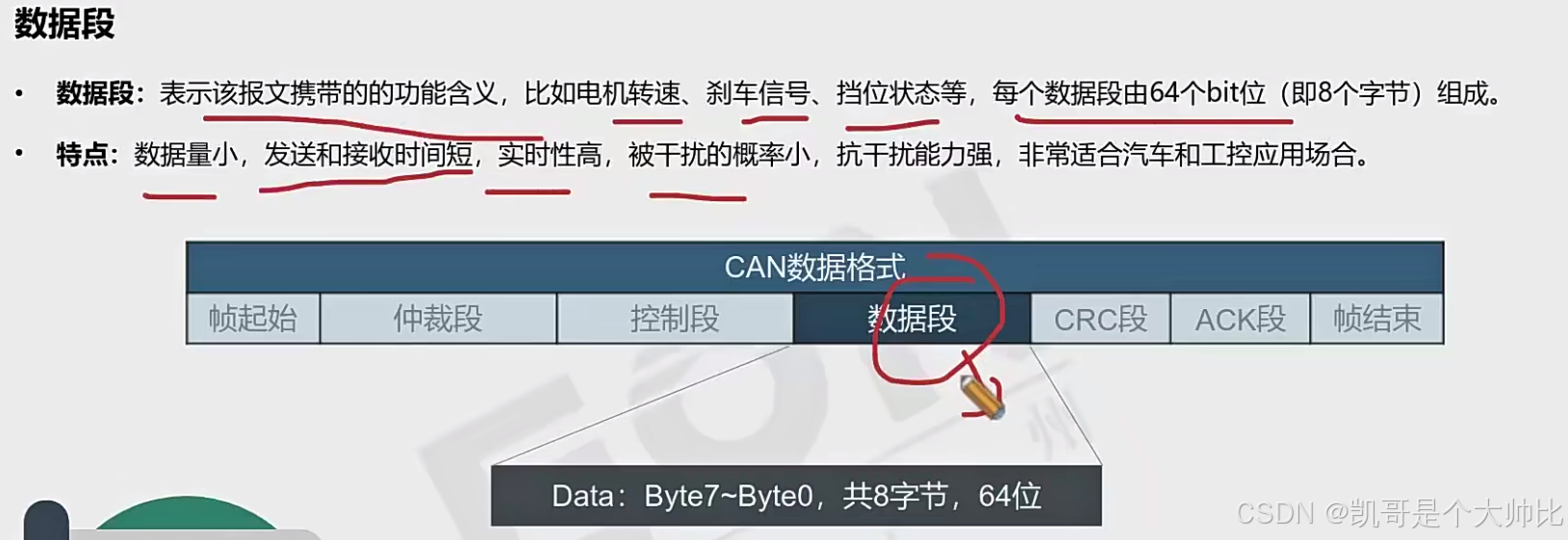
Data Byte 从左到右为第一到第8个字节, 0x描述为 0x byte1 byte0
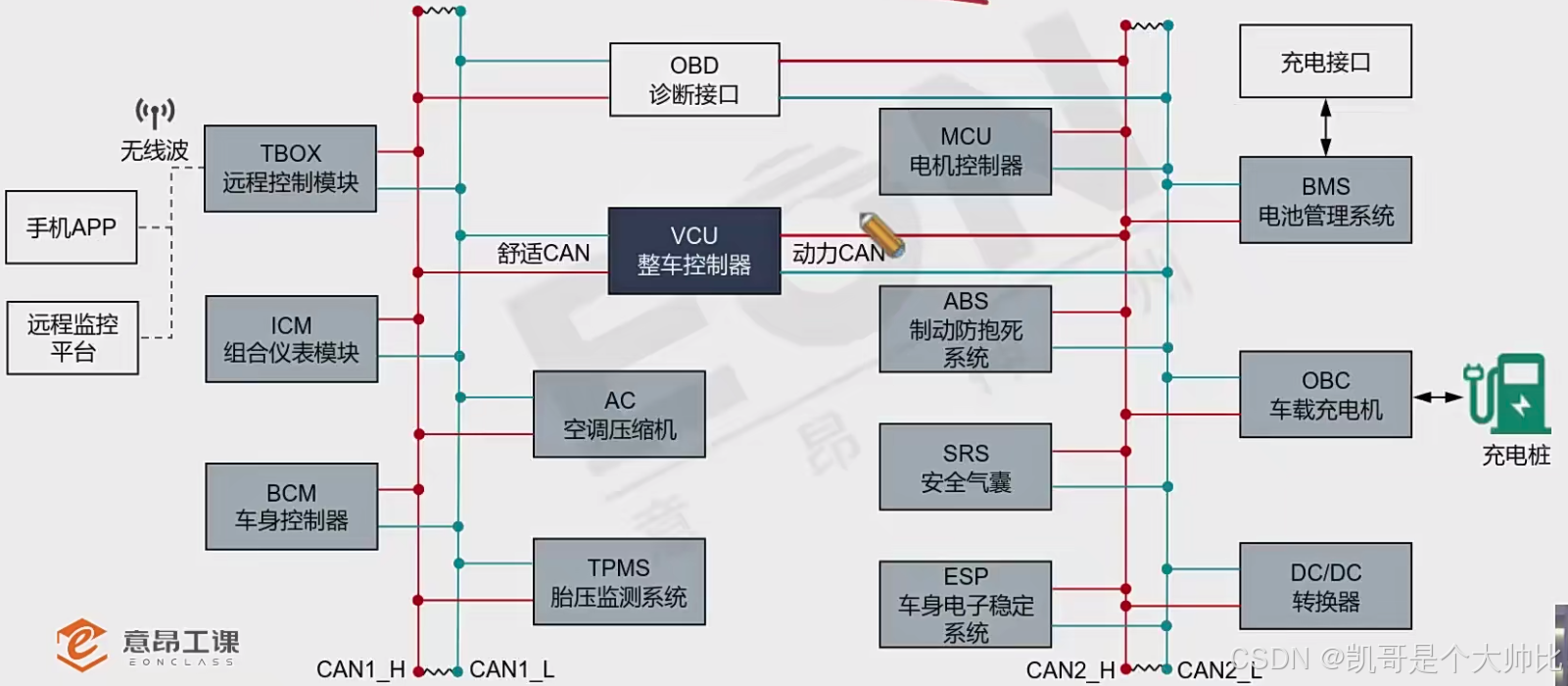
5. 整车CAN网络拓扑
CAN通讯率分为高速CAN和低速容错CAN,二者具有不同的物理特性,一般动力控制相关的总线波特率为500k,车载舒适系统挂靠的总线为250k。
波特率是指CAN总线上每秒钟传输的位数。它决定了数据传输的速度和效率。
三、VCU软件架构
软件架构即软件的基本结构,从本质上来看,软件架构属于一种系统草图,其所描述的对象就是系统 抽象组件。软件架构指定了整个软件系统的组织和拓扑结构,提供了一些设计决策的基本原理。
1.分层软件架构
分层软件架构将系统分为多个层次,每一层负责不同的功能。这种架构的主要特点是,每一层都有明确的接口和职责,层与层之间的耦合度较低,提高了系统的灵活性和科维护性。
典型的分层软件架构
- 表示层(Presentation Layer):负责用户界面和用户交互,包括输入、输出和显示数据。
- 应用层(Application Layer):负责业务逻辑和应用程序的核心功能,包括数据处理和计算。
- 业务逻辑层(Business Logic Layer):负责实现业务规则和逻辑,包括数据验证和处理。
- 数据访问层(Data Access Layer):负责数据存储和检索,包括数据库操作和文件访问。
- 基础设施层(Infrastructure Layer):负责提供底层服务,包括网络通信、安全和操作系统服务。
2. autosar(automotive open system architecture) 汽车开放系统软件架构
AUTOSAR(Automotive Open System Architecture)是一个为汽车电子控制单元(ECU)提供开放和标准化的软件架构的全球开发合作伙伴。它的目标是提高汽车软件的可重用性、可扩展性和可维护性。
计划目标
- 建立分层的体系架构
- 为应用程序的开发提供方法轮
- 制定各种应用接口规范
3. AUTOSAR架构分层模型
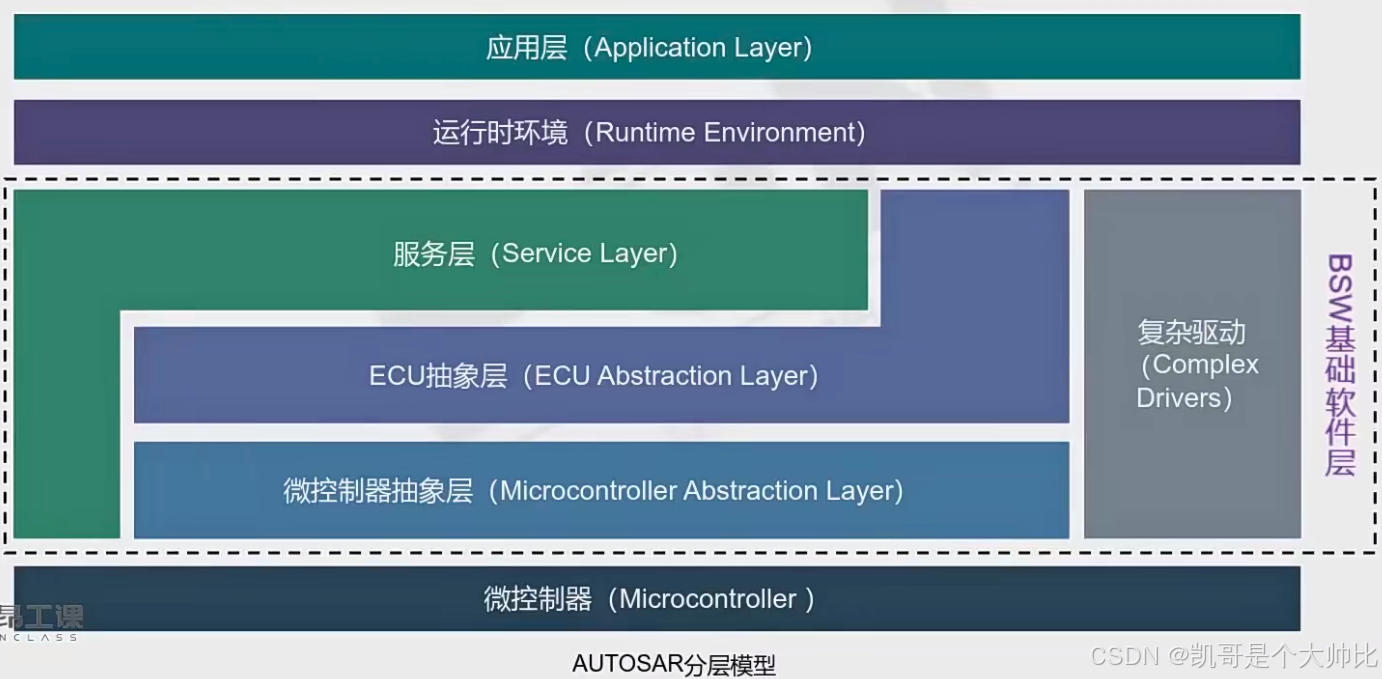
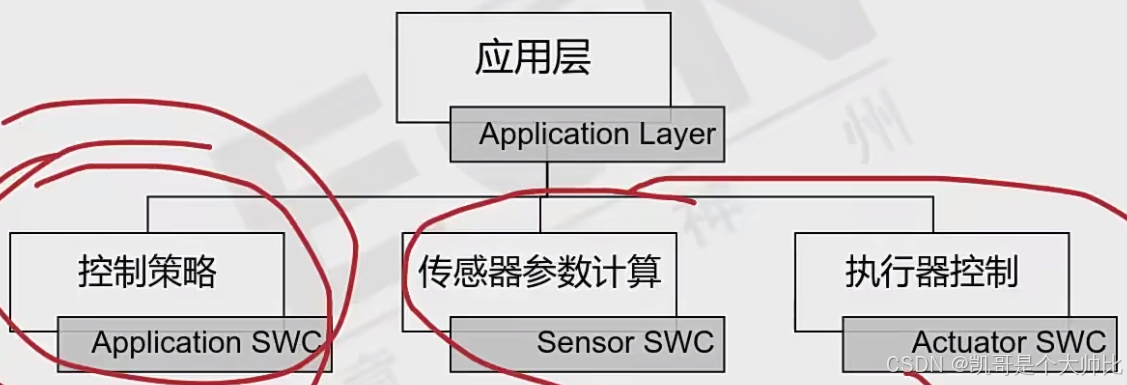
3-1 应用层(Application Layer)
- 功能:包含应用软件组件(SWC),这些组件实现具体的汽车功能,如发动机管理、车身控制等。
- 特点:应用层组件是独立的功能模块,通过明确的接口与其他组件进行交互。
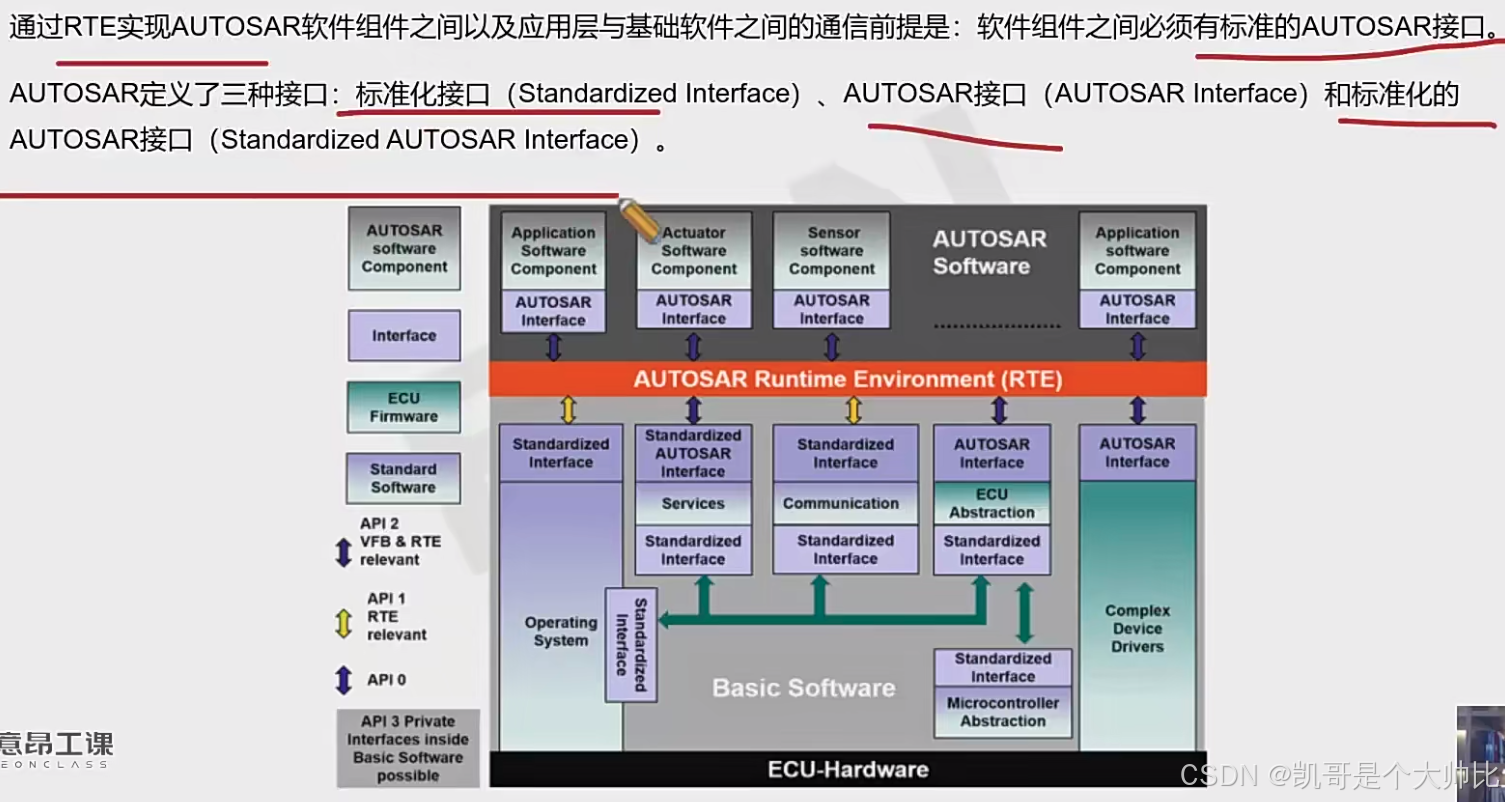
3-2 运行时环境(RTE,Runtime Environment)
- 功能:提供应用层与基础软件层之间的通信接口。
- 特点:RTE是AUTOSAR架构的核心,负责在不同的ECU上实现软件组件之间的通信。包括SWC之间、SWC与BSW之间的数据交互。
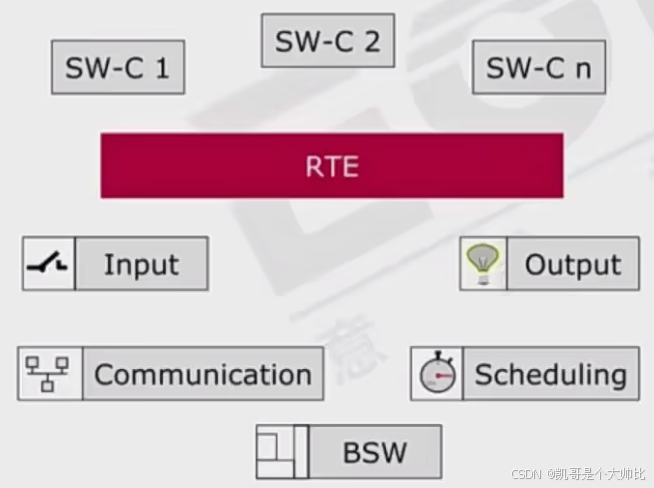
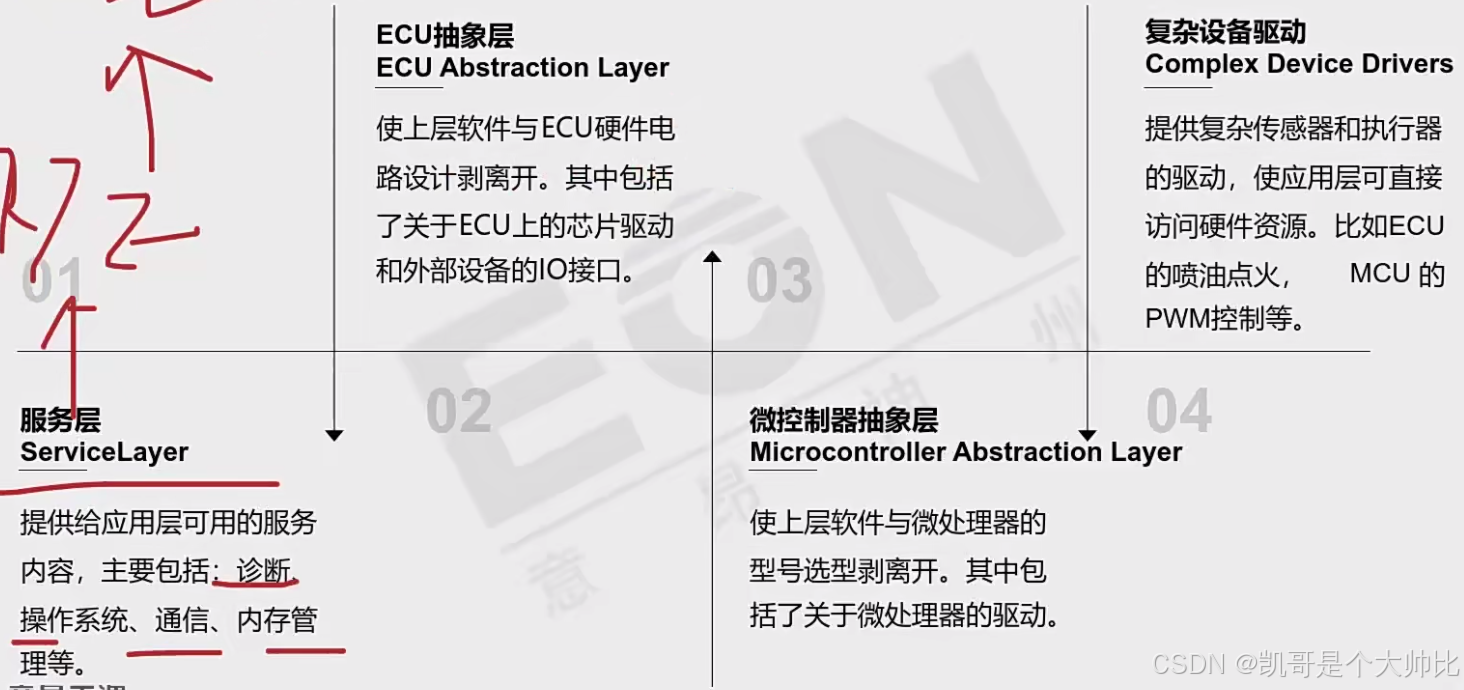
3-3 基础软件层(Basic Software Layer)
- 功能:提供基本的系统服务和硬件抽象。
- 组成:
服务层:提供操作系统服务、诊断服务、通信服务等。
ECU抽象层:屏蔽硬件差异,提供对传感器、执行器等的统一访问接口。
微控制器抽象层:直接与硬件交互,提供对微控制器的访问。
3-4 微控制器硬件(Microcontroller Hardware)
- 功能:实际的硬件平台,包括CPU、内存、I/O接口等。
- 特点:基础软件层通过硬件抽象层与微控制器硬件进行交互。
3-5 接口规范

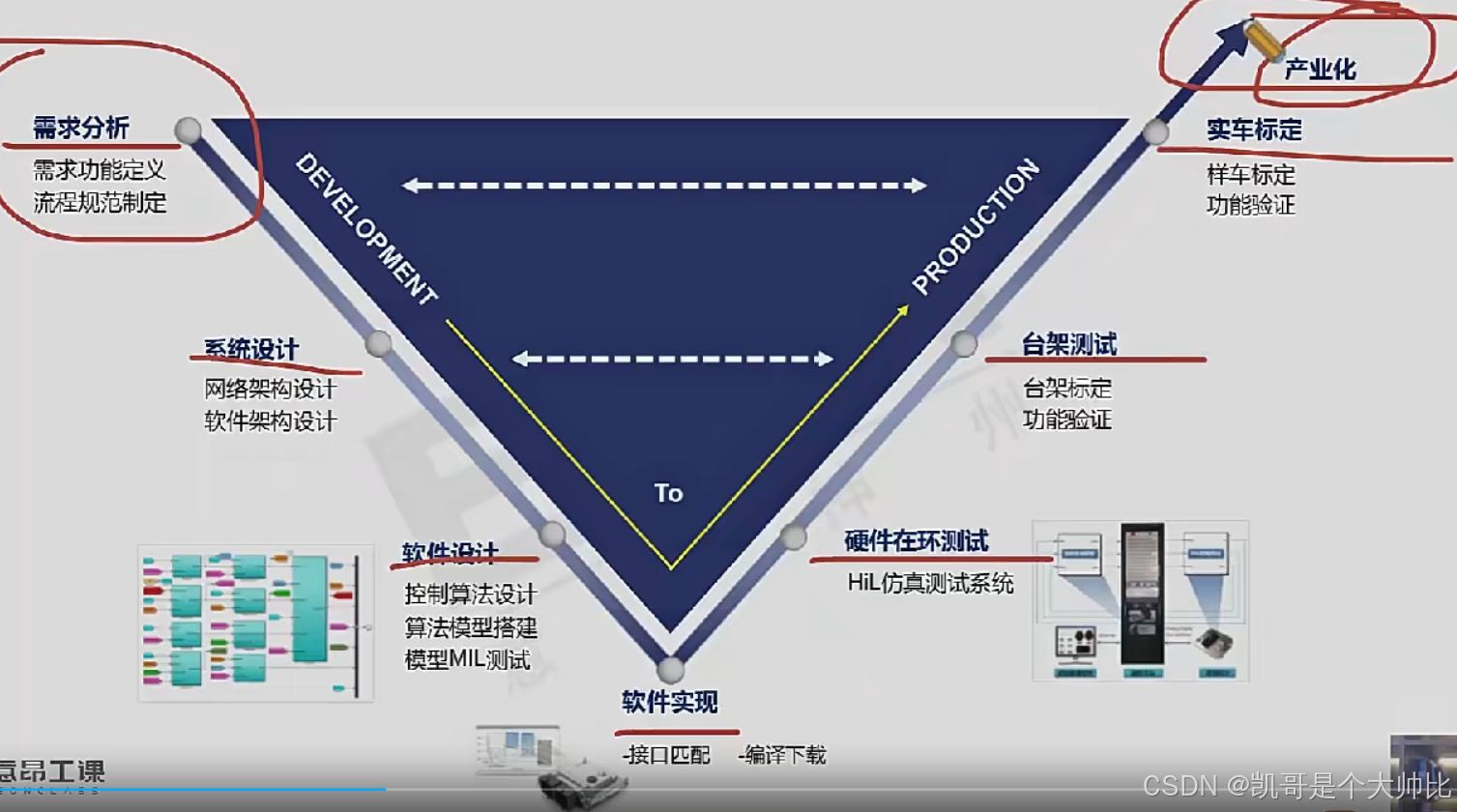
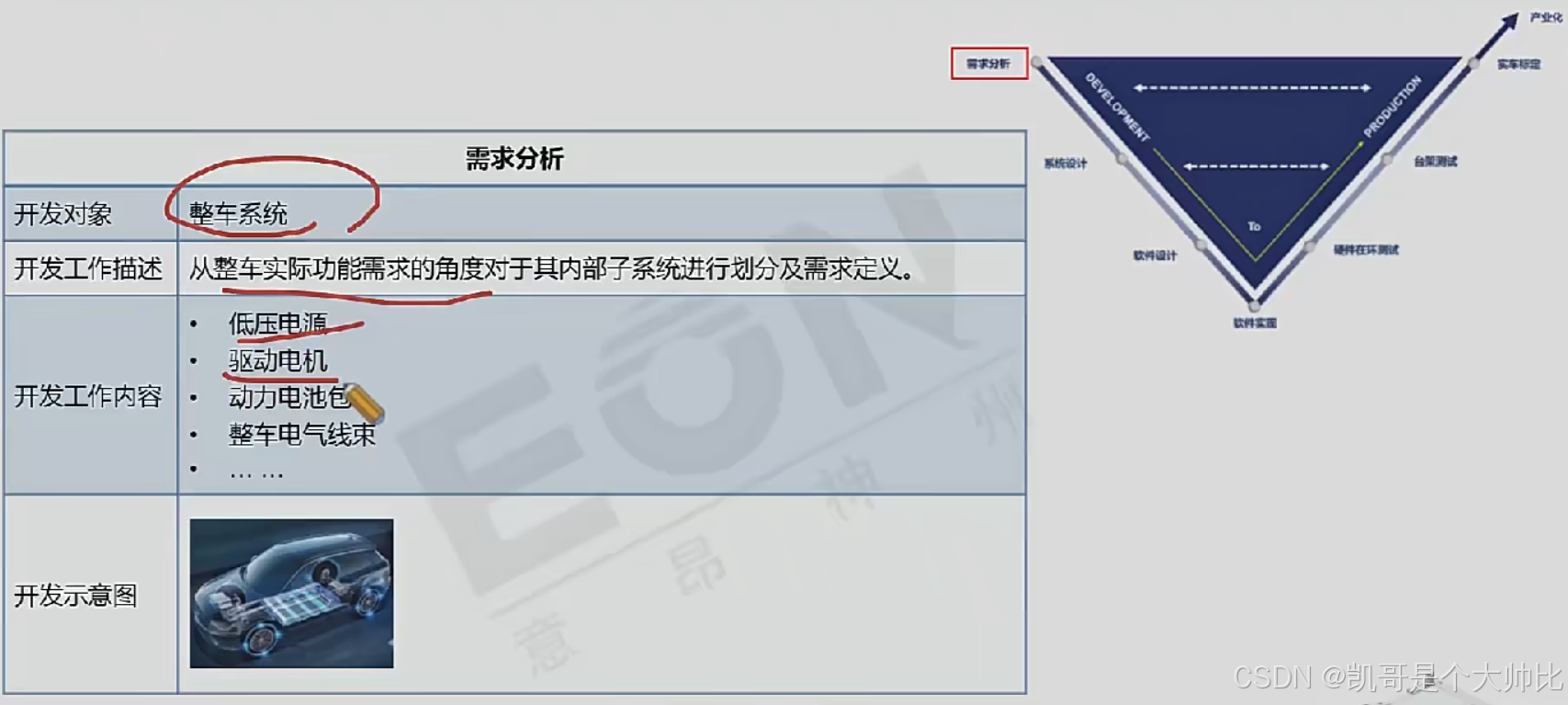
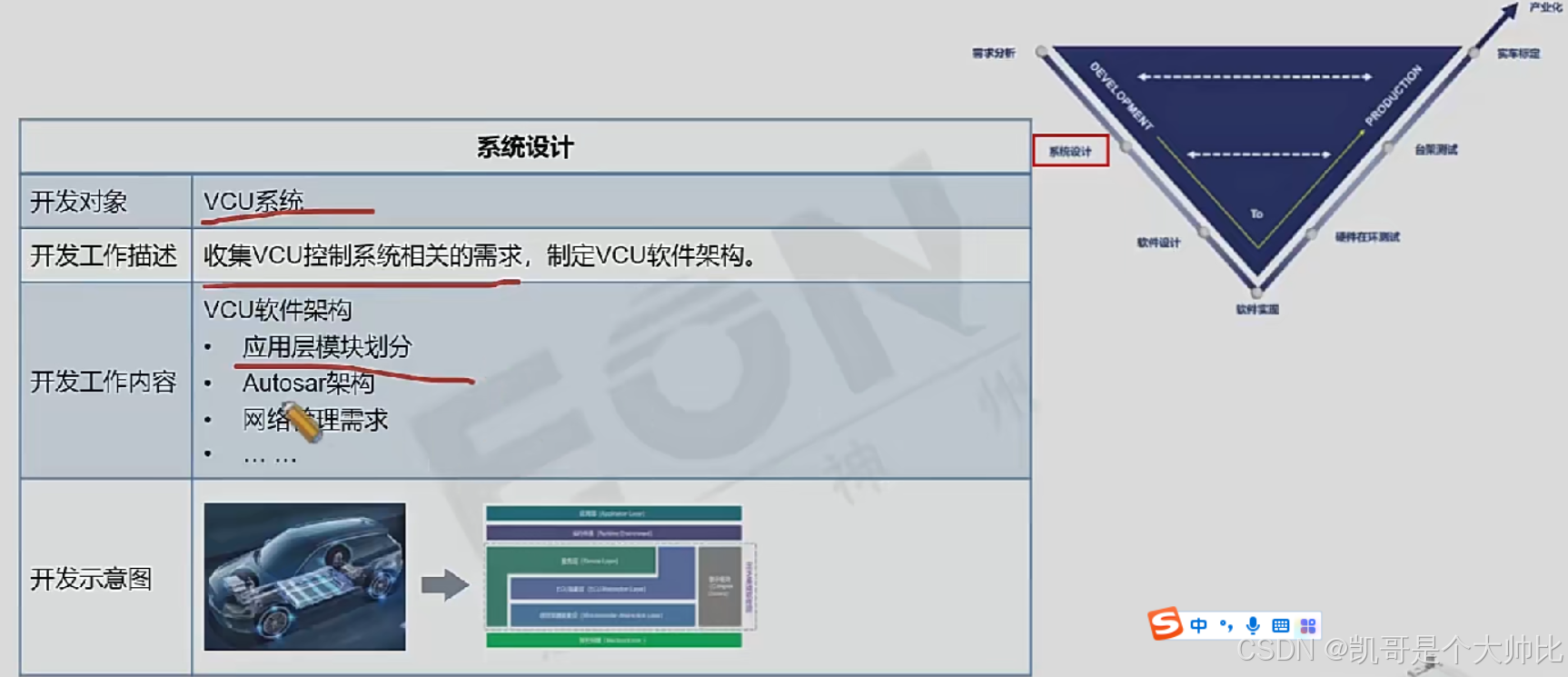
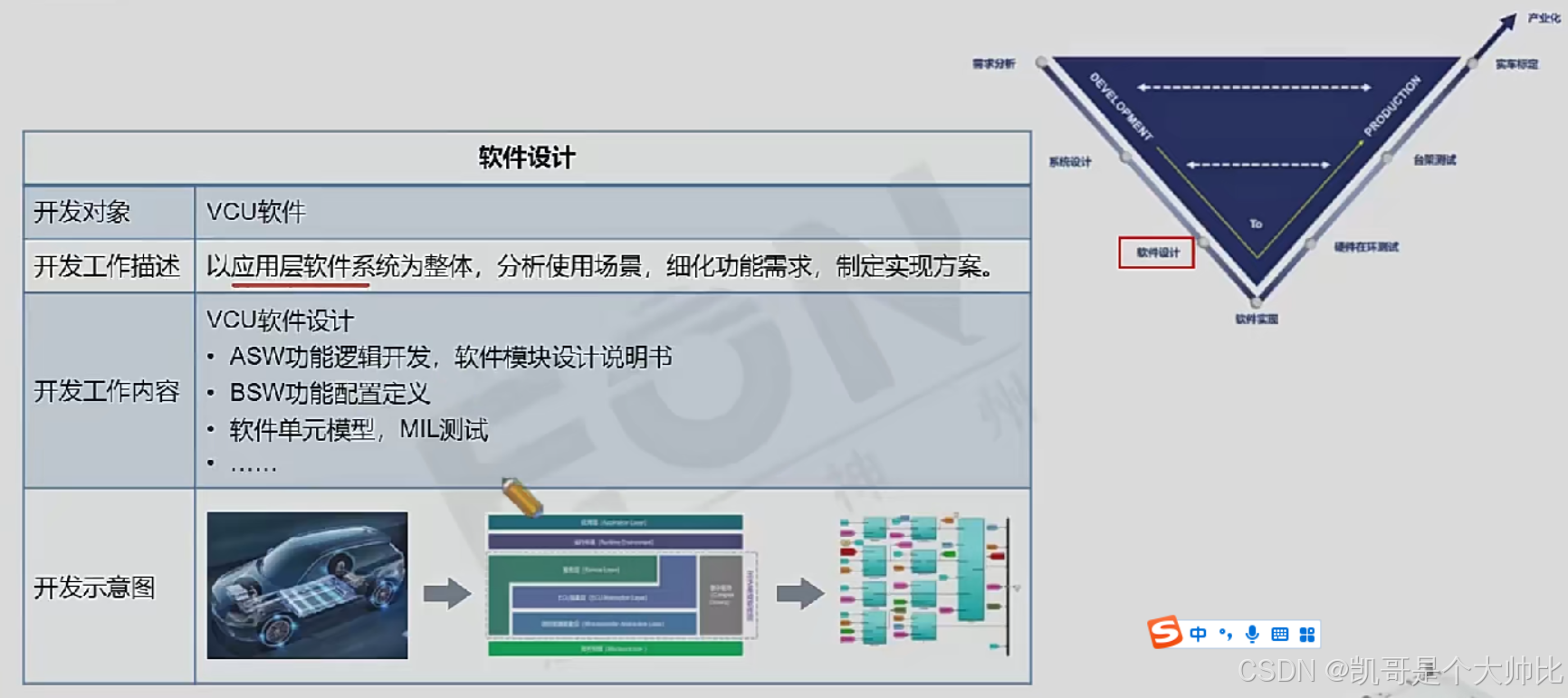
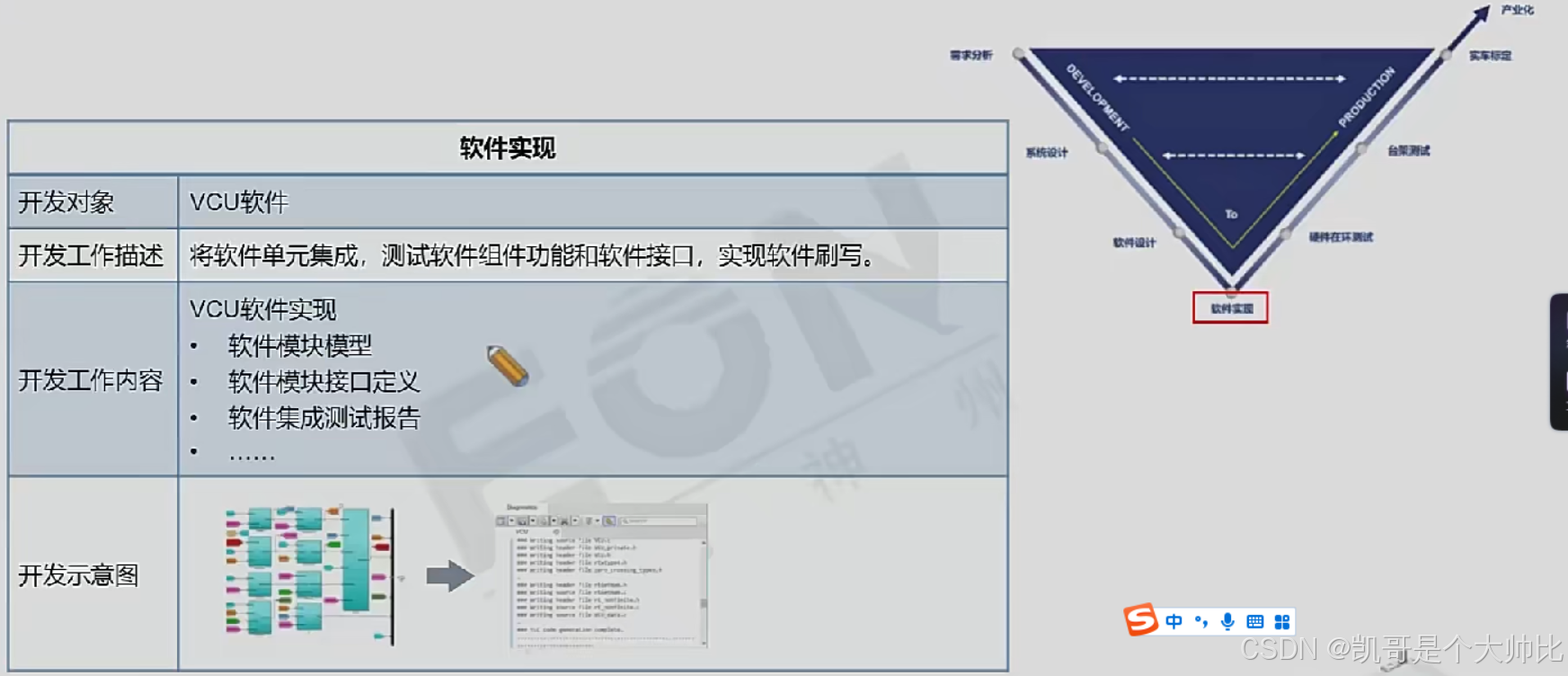
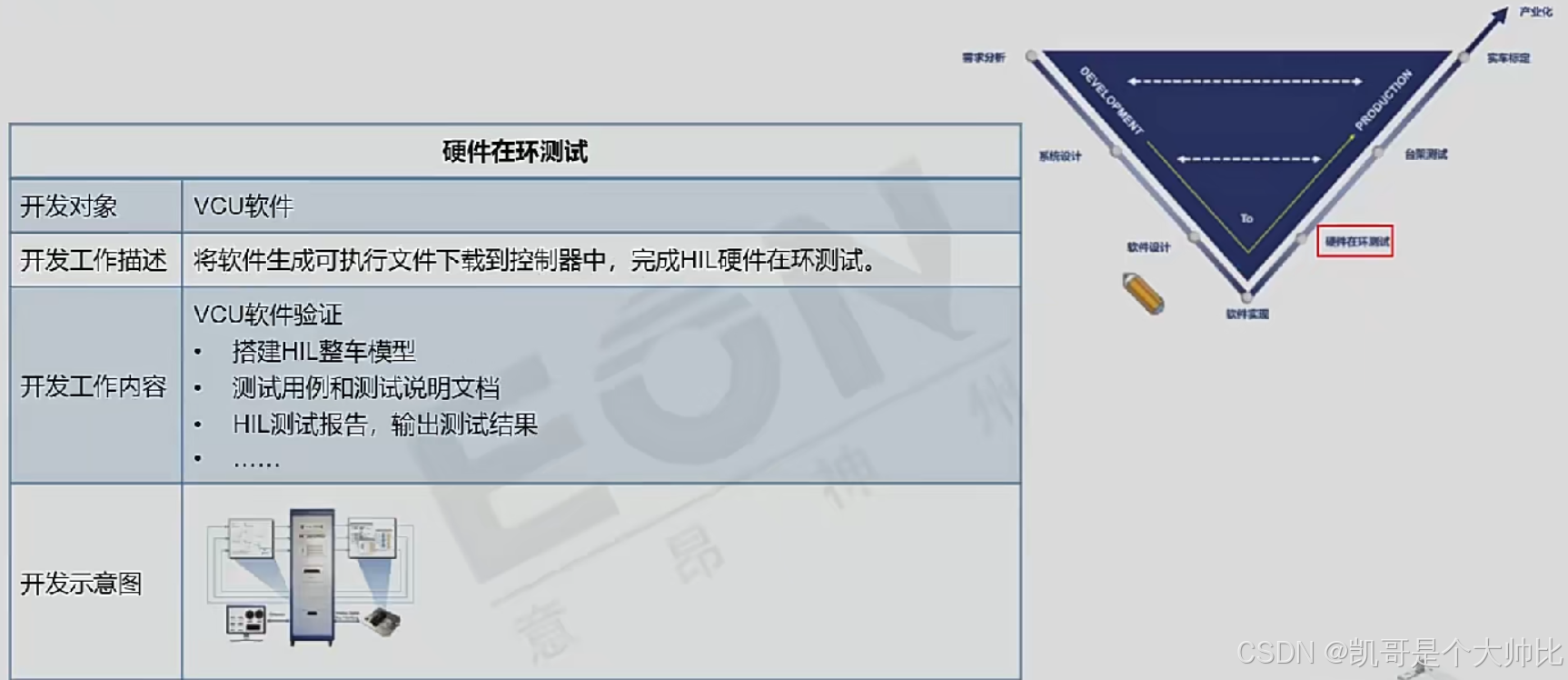
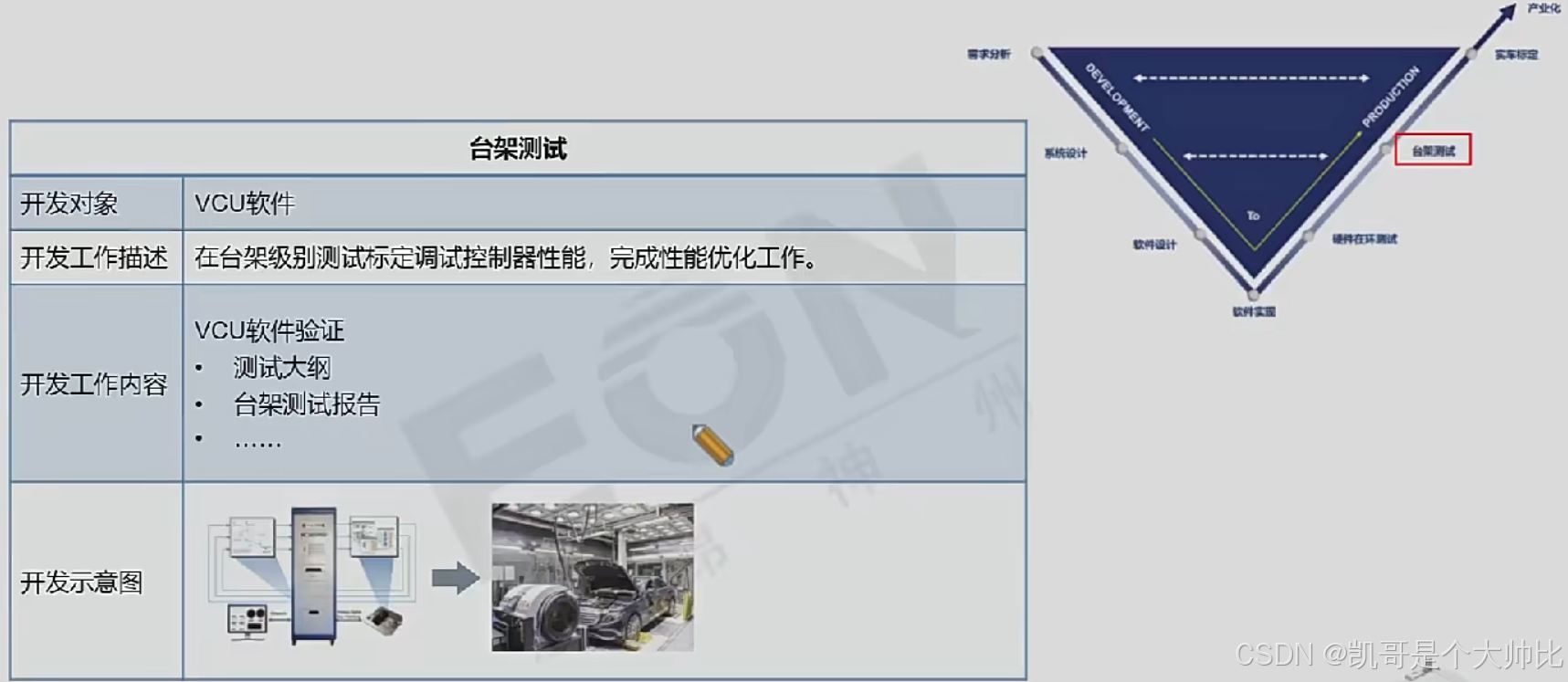
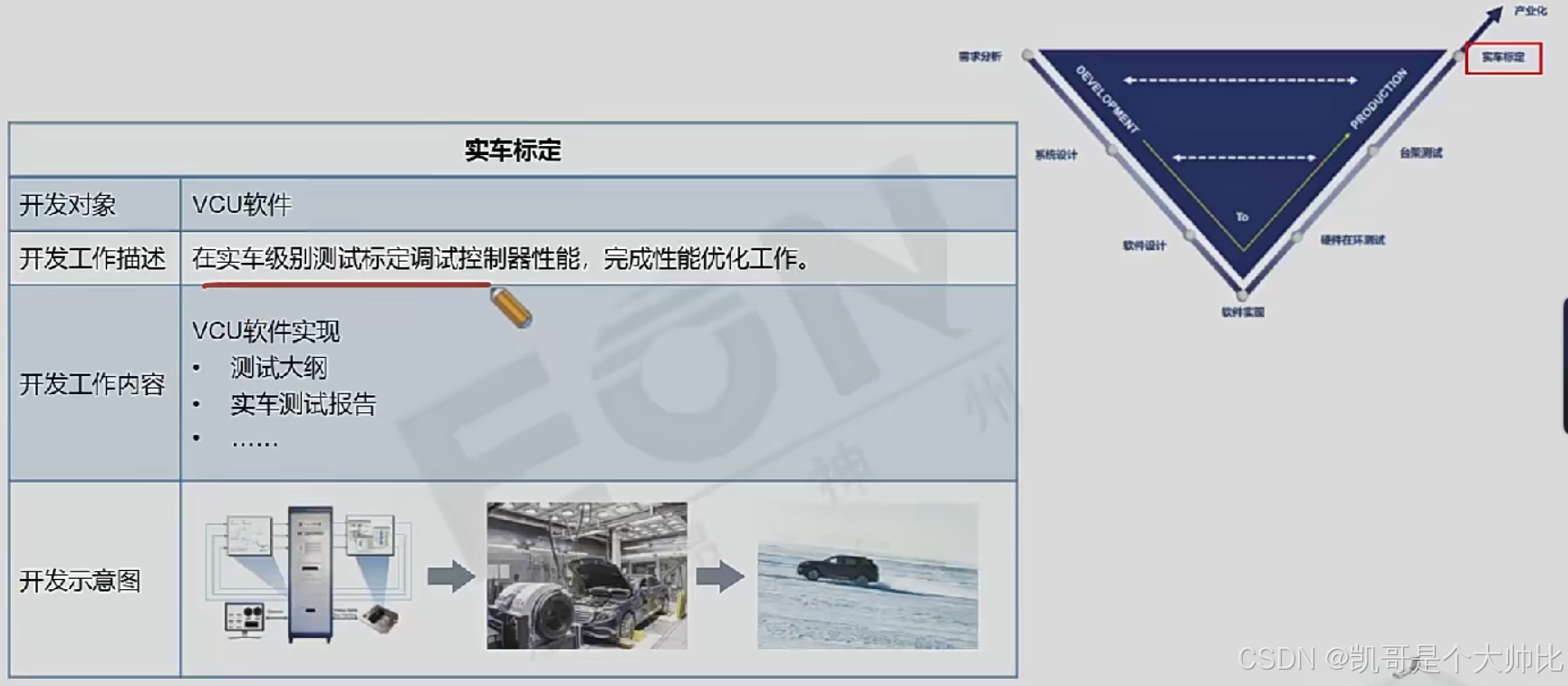
四、VCU电控开发流程
基于模型的V型开发流程强调验证和验证过程的并行性,确保每个开发阶段都有相应的测试阶段。
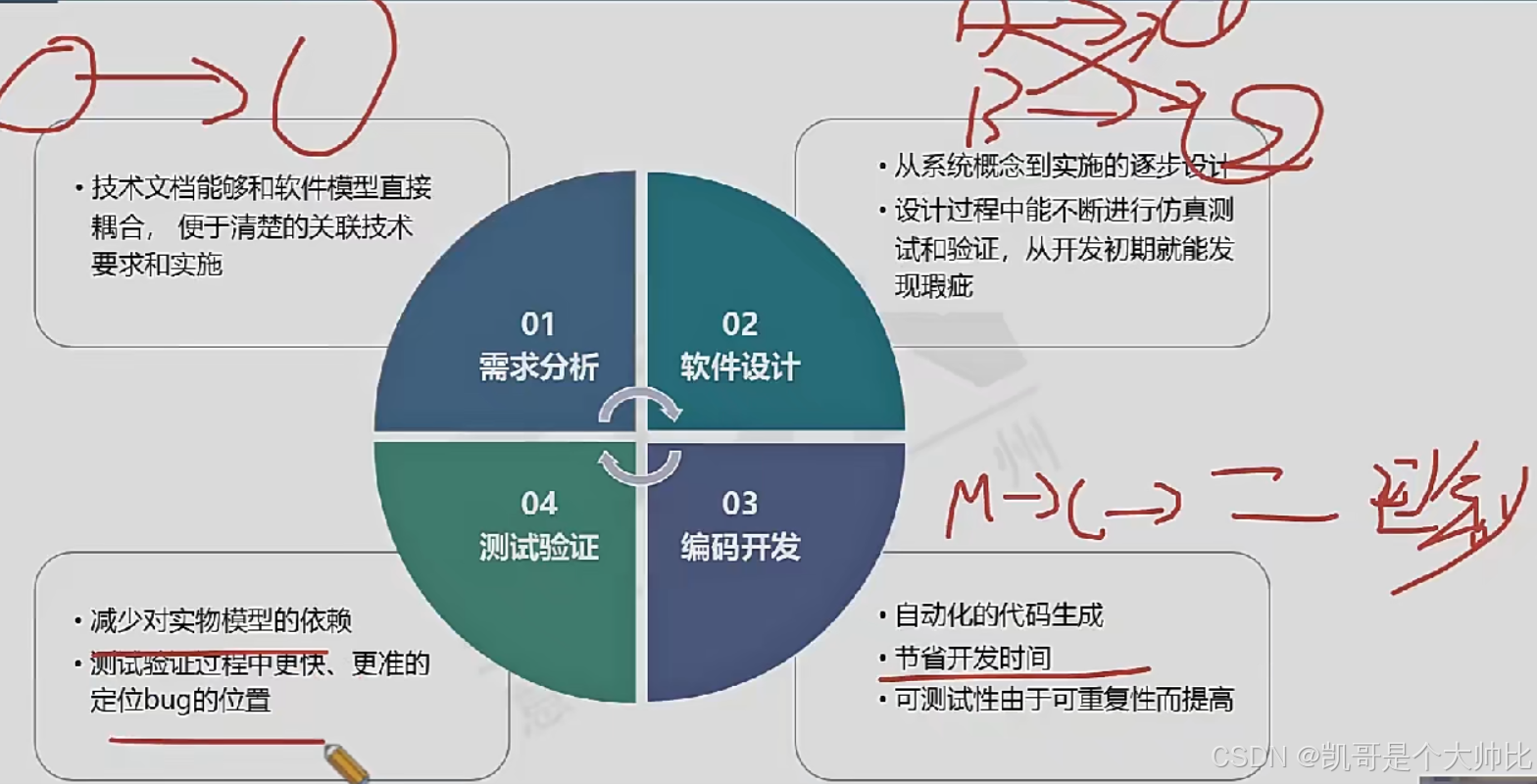
4-2 模型开发优势
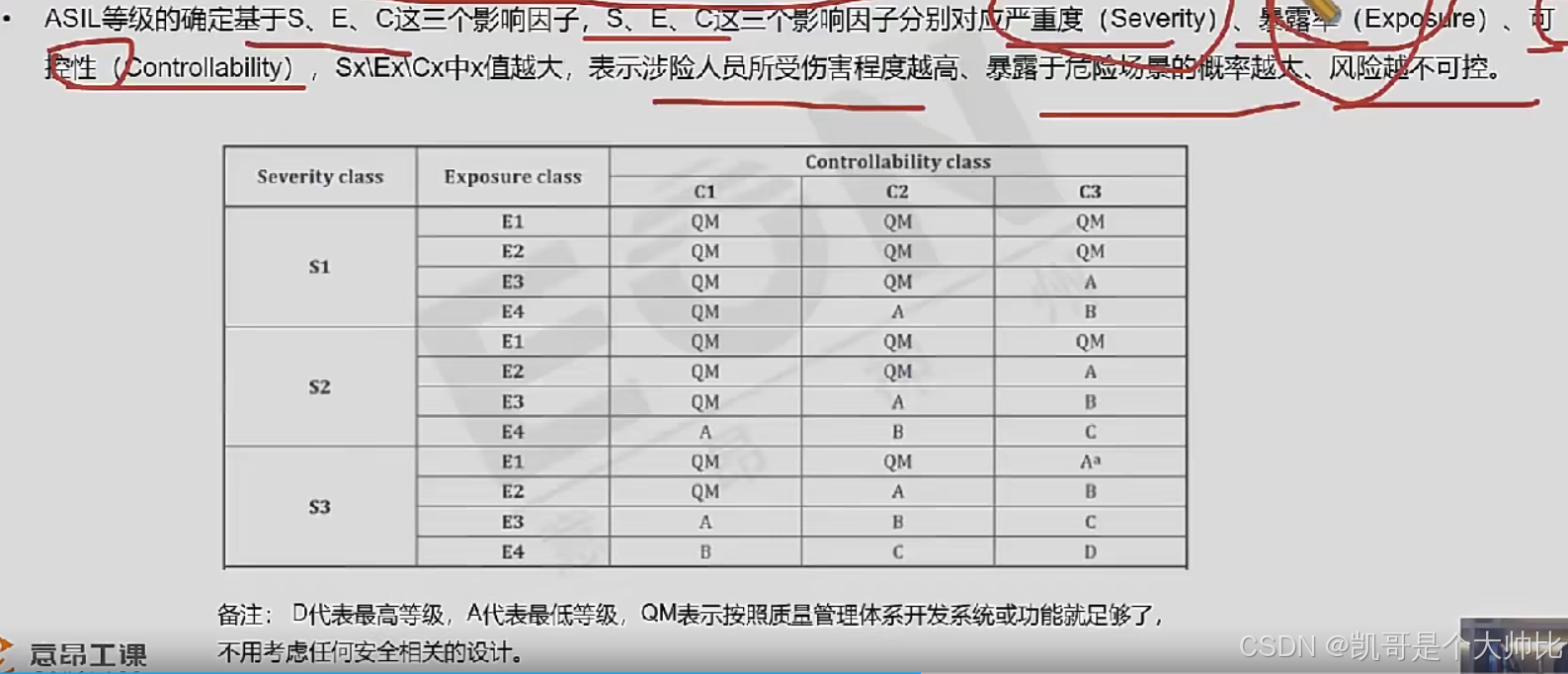
五、功能安全标准解析
功能安全 通过安全功能和安全措施来避免不可容许的功能风险的技术总称。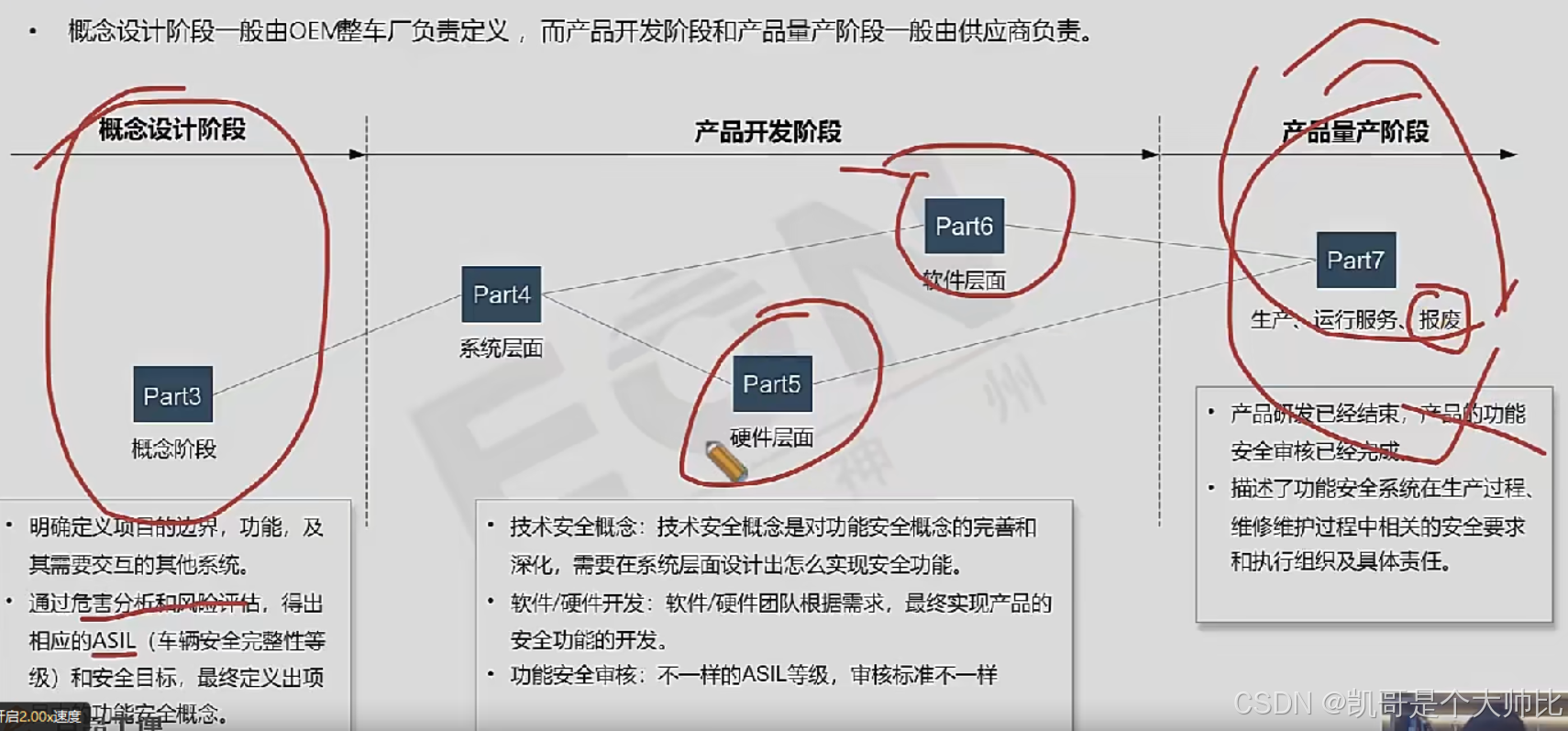

















 139
139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









