







在本教程中,我们将展示如何检测三维形状的ISS关键点。该实现基于俞忠在2009年《Intrinsic Shape Signatures: A Shape Descriptor for 3D Object Recognition》中提出的关键点检测模块。
ISS关键点原理
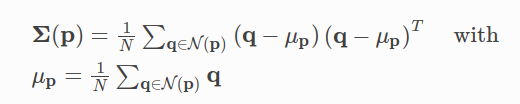
ISS显著性度量是由对每个点所在的球形区域内的所有点的散射矩阵
的特征值分解(EVD)决定的,即
在给定的情况下,其特征值从大到小表示为λ1,λ2,λ3。 在筛选关键点过程中,使两个连续特征值之比低于阈值
,
:
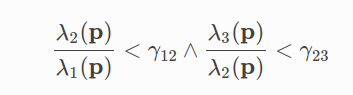
其基本原理是避免对沿主方向具有相似分布的点处检测关键点,因为在无法建立可重复的规范参考系的情况下,随后的描述阶段很难有效。在剩余的点中,显著性由最小特征值的大小决定(试想,如果临近点沿某个方向分布致密则该方向会作为椭球的第一主方向,稀疏的方向则是第二主方向,法线方向当然是极度稀疏(只有一层),那么则作为第三主方向。如果某个点恰好处于角点,则第一主特征值,第二主特征值,第三主特征值大小相差不会太大。如果点云沿着某方向致密,而垂直方向系数则有可能是边界):
在执行完上述检测步骤之后,如果某个点在给定的邻域上具有最大显著值,则该点将被视为关键点。
注意:有关更多详细信息,请参考原始出版物或Tombari等人的“Performance Evaluation of 3D Keypoint Detectors”。
代码展示
# -*-coding:utf-8 -*-
import numpy as np
import time
import open3d as o3d
import Open3D.examples.python.open3d_tutorial as o3dtut
# Compute ISS Keypoints on Armadillo
mesh = o3dtut.get_armadillo_mesh()
pcd = o3d.geometry.PointCloud()
pcd.points = mesh.vertices
tic = time.time()
keypoints = o3d.geometry.keypoint.compute_iss_keypoints(pcd)
toc = 1000 * (time.time() - tic)
print("ISS Computation took {:.0f} [ms]".format(toc))
mesh.compute_vertex_normals()
mesh.paint_uniform_color([0.5, 0.5, 0.5])
keypoints.paint_uniform_color([1.0, 0.75, 0.0])
o3d.visualization.draw_geometries([keypoints, mesh], front=[0, 0, -1.0])
# This function is only used to make the keypoints look better on the rendering
def keypoints_to_spheres(keypoints):
spheres = o3d.geometry.TriangleMesh()
for keypoint in keypoints.points:
sphere = o3d.geometry.TriangleMesh.create_sphere(radius=0.001)
sphere.translate(keypoint)
spheres += sphere
spheres.paint_uniform_color([1.0, 0.75, 0.0])
return spheres
# Compute ISS Keypoints on Standford Bunny, changing the default parameters
mesh = o3dtut.get_bunny_mesh()
pcd = o3d.geometry.PointCloud()
pcd.points = mesh.vertices
tic = time.time()
keypoints = o3d.geometry.keypoint.compute_iss_keypoints(pcd,
salient_radius=0.005,
non_max_radius=0.005,
gamma_21=0.5,
gamma_32=0.5)
toc = 1000 * (time.time() - tic)
print("ISS Computation took {:.0f} [ms]".format(toc))
mesh.compute_vertex_normals()
mesh.paint_uniform_color([0.5, 0.5, 0.5])
o3d.visualization.draw_geometries([keypoints_to_spheres(keypoints), mesh])效果展示

















 2563
2563











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









