






1. 极点和极线
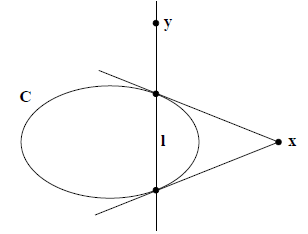
定义(极点pole和极线polar):点x 与二次曲线C 共同决定一条直线 l = Cx 叫做 x 对 C 的极线,点 x 叫做极线 l 对C 的极点。
定理(极点与极线的关系, pole-polar relationship):点x 对 C 的极线 l 与 C 相交于两点,通过这两点的 C 的两条切线相交于点x.
如果点 x 位于C 上,则它的极线就是 C 在点 x 上的切线。
如果点 x 位于 C 内部,会怎么样?
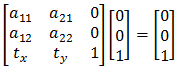
定义(相关,correlation):由极点和极线的定义可知,二次曲线引入了在空间P2 上从点 x 到直线 l 之间的一个映射,这个映射关系可以用1个3x3非奇异矩阵A 来表示,即 l = Ax. 这叫做相关,它代表在空间 P2 上从一个点到一条直线的一个可逆的映射。
映射矩阵 A 不一定是对称的,但是二次曲线C 一定是对称的。并且由于 C 的对称性,使得这一映射具有共轭的特点。
定义(共轭点, conjugate points):如果极点x 对二次曲线 C 的极线为 l = Cx,且点 y 位于极线 l 上,则有 yT l = yT Cx = 0。任意两个满足条件yT Cx = 0的点 x 和y 称为对 C 共轭。
定理(共轭定理):如果点x 位于点 y 的极线上,那么 y 也位于 x 的极线上。
由二次曲线 C 的对称性,很容易得到上述结论。
由对偶定理,可以得到具有共轭关系的两条直线。
定义(共轭直线,conjugate lines):两条直线 l 和m 共轭,如果 lT C*m = 0.
2. 固定点和固定线
前面已经讲到,无穷线在投影变换下是固定的,而虚圆点在相似性变换下是固定的。本节进一步讨论这个问题。
对3x3变换矩阵 H 进行特征值分解,得到
He = λe
其中 e 是特征向量,λ 是特征值。如果把特征向量 e 看做 P2 空间中的一个齐次点,则显然 e 和λe 代表同一个点。这说明点 e 在变换 H 中是个固定点。
3x3 矩阵 H 最多有3个特征值,则相应的有3个固定点。
对于直线的变换l' = H-Tl, 把它写成 l = HT l', 则可以看到,HT 的特征向量对应于3条固定线。
欧式矩阵:进行特征值分解,得到

可见,欧式矩阵的两个特征值{eiθ,e-iθ}代表旋转角度,它们对应的特征向量就是两个虚圆点 I 和 J. 可见虚圆点在欧式变换下是固定的。
第三个特征向量 (a,b,c)T,叫做极点 (pole) ,对应于特征值1。
相似矩阵:进行特征值分解,得到

可见,虚圆点在相似变换下仍然是固定的。特征值代表了旋转角度和缩放比例。
仿射矩阵:对仿射矩阵的转置矩阵 HAT 进行特征值分解,得到
可见,无穷线 l∞ = (0, 0, 1)T在仿射变换下是固定的。















 3886
3886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









