







 本文是关于RoboWorks和RoboTalk的学习笔记,主要介绍了这两个软件的基本操作,包括界面、建模、部件运动的设置,以及三种仿真控制方式:键盘控制、数据文件控制和编程控制。此外,还提出了远程控制和MATLAB/LABVIEW集成的疑问。
本文是关于RoboWorks和RoboTalk的学习笔记,主要介绍了这两个软件的基本操作,包括界面、建模、部件运动的设置,以及三种仿真控制方式:键盘控制、数据文件控制和编程控制。此外,还提出了远程控制和MATLAB/LABVIEW集成的疑问。
先给出网站链接,需要的安装包都可以下载到。我下了三个,RoboWorks/RoboTalk/RoboChat,时间原因,先介绍前两个,也是最重要的。
http://www.newtonium.com/
下载一个免费版的Demo就可以了,我主要用它仿真,看到在例子中有Kuka的六自由度机械手,就基本都我使用了。大家要是有别的需求,就只能购买了吧,反正我是买不起啦~
好,进入正题,其实只要认真看安装路径下的手册,也就不用在往下看了,手册最全,毕竟人家是软件的生产商。


一、界面和建模(简介)
见手册,里面有例子,照做即可。树状图中,ctrl+A添加部件。各种部件的参数设置都很显然。
模型可以 自建 或者第三方软件(我使用SolidWorks)生成 XXX.stl 文件导入。
sample文件夹中有很多例子,附图几个。鼠标操作上默认是旋转拖动视图,缩放功能启用(右键->interactive mode->zooming)。
部件的运动有两种,平移(translation)和旋转(rotation)
运动参数设置为静态(static)用于建模,设置为动态(dynamic)用于仿真(simulation),重点说一下仿真。
关节仿真的运动控制三种方式:1键盘,2xxx.dat文件(使用txt或其他就可以生成),3通过RoboTalk.dll编程控制
1.键盘
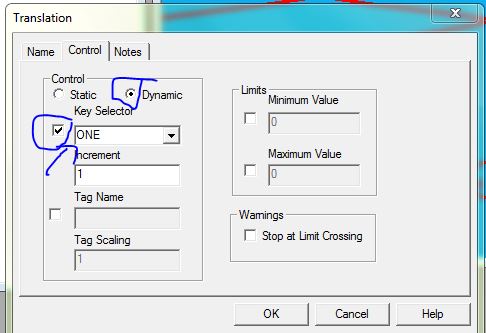
Key Selecton可以选择触发按键,ONE表示按键的“1”,也可选ABC...随意
点击ok之后就可以使用ONE键来控制部件运动(没有仿真按钮,也不需要按任何键)
2.xxx.dat文件
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









