









 探讨卡尔曼滤波器与深度学习结合的研究进展,介绍几项前沿工作,包括利用混合模型改进状态估计准确性和鲁棒性,以及在部分已知动力学系统中应用神经网络辅助卡尔曼滤波。
探讨卡尔曼滤波器与深度学习结合的研究进展,介绍几项前沿工作,包括利用混合模型改进状态估计准确性和鲁棒性,以及在部分已知动力学系统中应用神经网络辅助卡尔曼滤波。
突然心血来潮,想到卡尔曼滤波器是否能和深度学习结合。于是从谷歌学术上搜了一下,发现现在这方面的工作还没有太多结合。Top 期刊 TNNLS 2021 有一篇最新工作。ICLR 2020 出现一篇 Kalman Filter Is All You Need 的文章,但目前从开源的审稿意见来看,凶多吉少。其余的,大部分出自于一个 Guy Revach 学者(团队)。
DynaNet: Neural Kalman dynamical model for motion estimation and prediction [TNNLS 2021]
Abstract:
Dynamical models estimate and predict the temporal evolution of physical systems. State-space models (SSMs) in particular represent the system dynamics with many desirable properties, such as being able to model uncertainty in both the model and measurements, and optimal (in the Bayesian sense) recursive formulations, e.g., the Kalman filter. However, they require significant domain knowledge to derive the parametric form and considerable hand tuning to correctly set all the parameters. Data-driven techniques, e.g., recurrent neural networks, have emerged as compelling alternatives to SSMs with wide success across a number of challenging tasks, in part due to their impressive capability to extract relevant features from rich inputs. They, however, lack interpretability and robustness to unseen conditions. Thus, data-driven models are hard to be applied in safety-critical applications, such as self-driving vehicles. In this work, we present DynaNet, a hybrid deep learning and time-varying SSM, which can be trained end-to-end. Our neural Kalman dynamical model allows us to exploit the relative merits of both SSM and deep neural networks. We demonstrate its effectiveness in the estimation and prediction on a number of physically challenging tasks, including visual odometry, sensor fusion for visual-inertial navigation, and motion prediction. In addition, we show how DynaNet can indicate failures through investigation of properties, such as the rate of innovation (Kalman gain).
Kalman Filter Is All You Need: Optimization Works When Noise Estimation Fails [ICLR 2020 Under review]
Kalman Filter Is All You Need: Optimization Works When Noise Estimation Fails | OpenReview
(貌似要被拒)
Abstract:
Determining the noise parameters of a Kalman Filter (KF) has been studied for decades. A huge body of research focuses on the task of noise estimation under various conditions, since precise noise estimation is considered equivalent to minimization of the filtering errors. However, we show that even a small violation of the KF assumptions can significantly modify the effective noise, breaking the equivalence between the tasks and making noise estimation an inferior strategy. We show that such violations are common, and are often not trivial to handle or even notice. Consequentially, we argue that a robust solution is needed - rather than choosing a dedicated model per problem. To that end, we apply gradient-based optimization to the filtering errors directly, with relation to an efficient parameterization of the symmetric and positive-definite parameters of the KF. In a variety of state-estimation and tracking problems, we show that the optimization improves both the accuracy of the KF and its robustness to design decisions. In addition, we demonstrate how an optimized neural network model can seem to reduce the errors significantly compared to a KF - and how this reduction vanishes once the KF is optimized similarly. This indicates how complicated models can be wrongly identified as superior to the KF, while in fact they were merely more optimized.
Kalmannet: Data-Driven Kalman Filtering [ICASSP_2021]
http://people.ee.ethz.ch/~grevach/KalmanNet_ICASSP_2021_Camera_Ready.pdf
Abstract:
The Kalman filter (KF) is a celebrated signal processing algorithm, implementing optimal state estimation of dynamical systems that are well represented by a linear Gaussian statespace model. The KF is model-based, and therefore relies on full and accurate knowledge of the underlying model. We present KalmanNet, a hybrid data-driven/model-based filter that does not require full knowledge of the underlying model parameters. KalmanNet is inspired by the classical KF flow and implemented by integrating a dedicated and compact neural network for the Kalman gain computation. We present an offline training method, and numerically illustrate that KalmanNet can achieve optimal performance without full knowledge of the model parameters. We demonstrate that when facing inaccurate parameters KalmanNet learns to achieve notably improved performance compared to KF.
KalmanNet: Neural network aided Kalman filtering for partially known dynamics
https://arxiv.org/pdf/2107.10043.pdf
Abstract:
Real-time state estimation of dynamical systems is a fundamental task in signal processing and control. For systems that are well-represented by a fully known linear Gaussian state space (SS) model, the celebrated Kalman filter (KF) is a low complexity optimal solution. However, both linearity of the underlying SS model and accurate knowledge of it are often not encountered in practice. Here, we present KalmanNet, a real-time state estimator that learns from data to carry out Kalman filtering under non-linear dynamics with partial information. By incorporating the structural SS model with a dedicated recurrent neural network module in the flow of the KF, we retain data efficiency and interpretability of the classic algorithm while implicitly learning complex dynamics from data. We numerically demonstrate that KalmanNet overcomes nonlinearities and model mismatch, outperforming classic filtering methods operating with both mismatched and accurate domain knowledge.
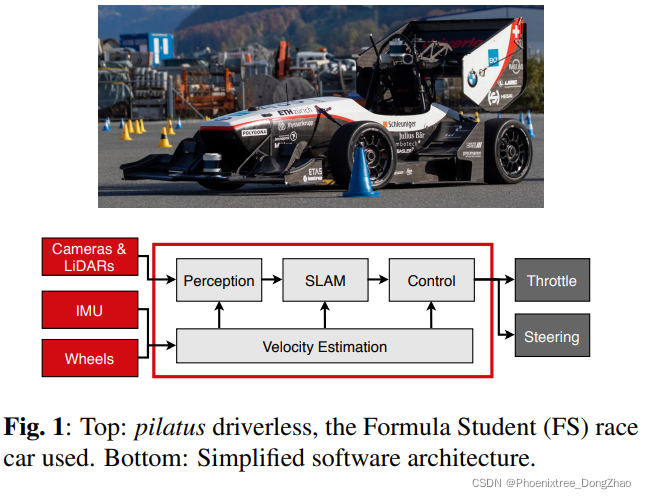
Data-driven Kalman-based velocity estimation for autonomous racing [ICAS_2021]
http://people.ee.ethz.ch/~grevach/KalmanNet_ICAS_2021.pdf
Abstract:
Real-time velocity estimation is a core task in autonomous driving, which is carried out based on available raw sensors such as wheel odometry and motor currents. When the system dynamics and observations can be modeled together as a fully known linear Gaussian state space (SS) model, the celebrated Kalman filter (KF) is a low complexity optimal solution. However, both linearity of the underlying SS model and accurate knowledge of it are often not encountered in practice. This work proposes to estimate the velocity using a hybrid data-driven (DD) implementation of the KF for non-linear systems, coined KalmanNet. KalmanNet integrates a compact recurrent neural network in the flow of the classical KF, retaining low computational complexity, high data efficiency, and interpretability, while enabling operation in non-linear SS models with partial information. We apply KalmanNet on an autonomous racing car as part of the Formula Student (FS) Driverless competition. Our results demonstrate the ability of KalmanNet to outperform a state-of-the-art implementation of the KF that uses a postulated SS model, while being applicable on the vehicle control unit used by the car.
Unsupervised Learned Kalman Filtering
https://arxiv.org/pdf/2110.09005.pdf
Abstract:
In this paper we adapt KalmanNet, which is a recently proposed deep neural network (DNN)-aided system whose architecture follows the operation of the model-based Kalman filter (KF), to learn its mapping in an unsupervised manner, i.e., without requiring ground-truth states. The unsupervised adaptation is achieved by exploiting the hybrid model-based/data-driven architecture of KalmanNet, which internally predicts the next observation as the KF does. These internal features are then used to compute the loss rather than the state estimate at the output of the system. With the capability of unsupervised learning, one can use KalmanNet not only to track the hidden state, but also to adapt to variations in the state space (SS) model. We numerically demonstrate that when the noise statistics are unknown, unsupervised KalmanNet achieves a similar performance to KalmanNet with supervised learning. We also show that we can adapt a pre-trained KalmanNet to changing SS models without providing additional data thanks to the unsupervised capabilities.
Uncertainty in Data-Driven Kalman Filtering for Partially Known State-Space Models
https://arxiv.org/pdf/2110.04738.pdf
Abstract:
Providing a metric of uncertainty alongside a state estimate is often crucial when tracking a dynamical system. Classic state estimators, such as the Kalman filter (KF), provide a time-dependent uncertainty measure from knowledge of the underlying statistics, however, deep learning based tracking systems struggle to reliably characterize uncertainty. In this paper, we investigate the ability of KalmanNet, a recently proposed hybrid model-based deep state tracking algorithm, to estimate an uncertainty measure. By exploiting the interpretable nature of KalmanNet, we show that the error covariance matrix can be computed based on its internal features, as an uncertainty measure. We demonstrate that when the system dynamics are known, KalmanNet—which learns its mapping from data without access to the statistics—provides uncertainty similar to that provided by the KF; and while in the presence of evolution model-mismatch, KalmanNet provides a more accurate error estimation.
RTSNET: Deep Learning Aided Kalman Smoothing
https://arxiv.org/pdf/2110.04717.pdf
Abstract:
The smoothing task is the core of many signal processing applications. It deals with the recovery of a sequence of hidden state variables from a sequence of noisy observations in a one-shot manner. In this work we propose RTSNet, a highly efficient model-based and data-driven smoothing algorithm. RTSNet integrates dedicated trainable models into the flow of the classical Rauch-Tung-Striebel (RTS) smoother, and is able to outperform it when operating under model mismatch and non-linearities while retaining its efficiency and interpretability. Our numerical study demonstrates that although RTSNet is based on more compact neural networks, which leads to faster training and inference times, it outperforms the state-of-the-art data-driven smoother in a non-linear use case.

















 1157
1157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









