









摄像机的内外参模型
- 本文主要讲摄像机内外参模型中一些看法
- 参考书籍 Hartley 《计算机视觉中的多视图几何》
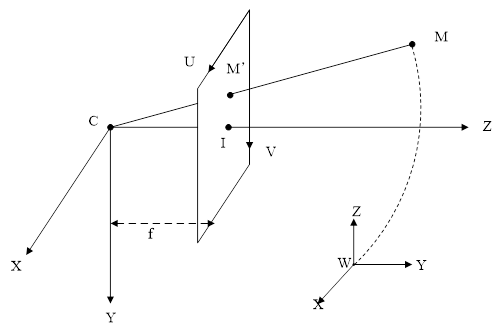
1坐标系定义
- 世界坐标系{W}:三维空间。
- 相机坐标系{C}:XY方向分别于像素平面的UV方向同向,原点光心。
- 图像坐标系{I}:XY方向分别于像素平面的UV方向同向,没有Z轴。
- 像素坐标系{P}:以像素为单位。
2图像坐标系是否有必要?
- 本书没有包括这个坐标系, 我认为是有必要的。因为有的时候需要用到投影点在图像坐标系{I}的坐标,比如对极几何求本质矩阵E的时候。
3推导简易流程
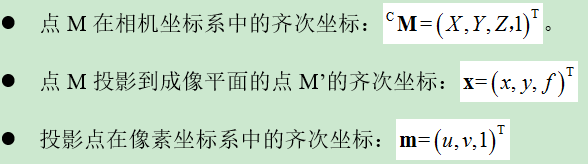
参数设定为
推导流程
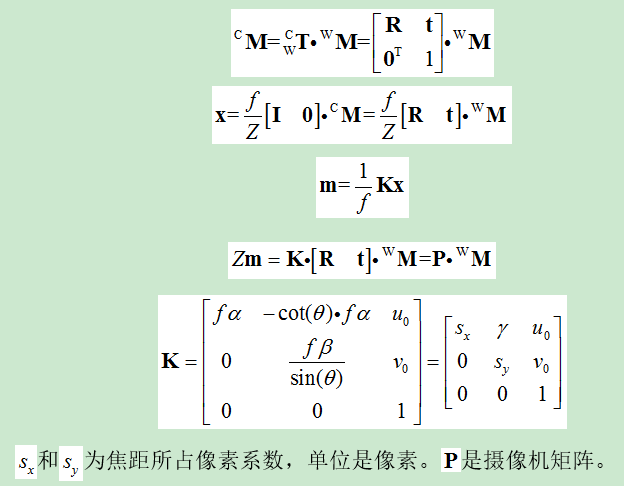
4图像坐标系成像点x和像素坐标系成像点m关系

这一点书写的很含糊,很多地方都是相差一个尺度因子一笔带过了,实际上也没错,这里写的是正式的表达式。
5内外参模型的理解
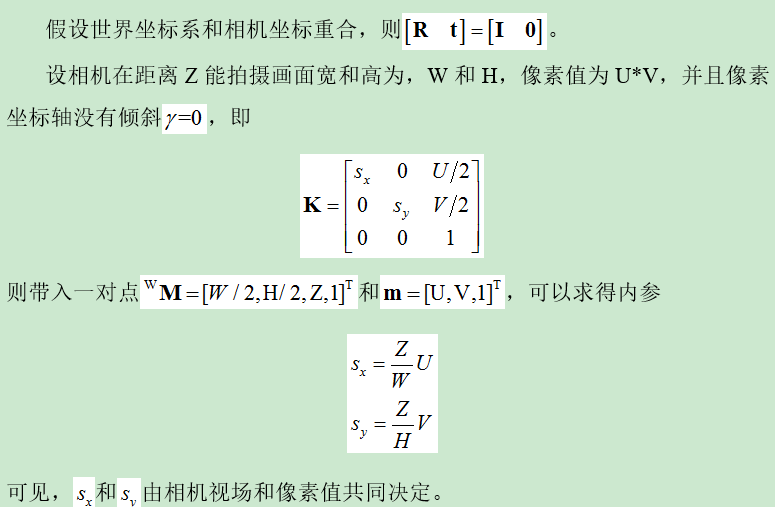
通常得到的内外参综合模型为

- 书中最左边用的是一个尺度因子s表示,而实际上这个尺度因子就是Z,是M在相机坐标系中的齐次坐标,和最右边的世界坐标系的M是不同的。















 2141
2141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









