




本人项目地址大全:Victor94-king/NLP__ManVictor: CSDN of ManVictor
论文地址: RoFormer
写在前面: 笔者更新不易,希望走过路过点个关注和赞,笔芯!!!
写在前面: 笔者更新不易,希望走过路过点个关注和赞,笔芯!!!
写在前面: 笔者更新不易,希望走过路过点个关注和赞,笔芯!!!
1 关于RoPE
RoPE(Rotary Position Embedding),是苏剑林大神在 2021 年就提出的一种 Transformer 模型的位置编码。
RoPE 是一种可以以绝对位置编码形式实现的相对位置编码,兼顾了模型性能和效率。
2023 年上半年的时候,大模型位置编码尚有 Alibi 和 RoPE 在相互比拼,而到了 2023 年下半年,及今 2024 年,新开源出来的模型,大部分都是使用 RoPE 了。当然 Alibi 也有其优势,这个在讲 Alibi 的时候来说。
苏神在他的个人网站科学空间中对 RoPE 有相关文章进行了介绍,本篇是在这个基础上,对 RoPE 进行理解(公式和符号上也会沿用苏神的写法)。
(1)以绝对位置编码的方式实现相对位置编码
前面提到,RoPE 是一种一绝对位置编码的方式实现的相对位置编码,那么这么做能带来什么收益?
先说原因:
在文本长度不长的情况下(比如 Bert 时代基本都是 256/512 token 的长度),相对位置编码和绝对位置编码在使用效果上可以说没有显著差别。
如果要处理更大长度的输入输出,使用绝对位置编码就需要把训练数据也加长到推理所需长度,否则对于没训练过的长度(训练时没见过的位置编码),效果多少会打些折扣。
而使用相对位置编码则更容易外推,毕竟 token-2 和 token-1 的距离,与 token-10002 和 token-10001 的距离是一样的,也因此可以缓解对巨量长文本数据的需求。
但是传统相对位置编码的实现相对复杂,有些也会有计算效率低的问题。由于修改了 self-attention 的计算方式,也比较难推广到线性注意力计算法模型中。
总结来说,就是绝对位置编码好实现,效率高,适用线性注意力,而相对位置编码易外推,因此就有了对“绝对位置编码的方式实现相对位置编码”的追求,去把二者的优点结合起来。
下面简单回顾一下绝对位置编码和相对位置编码。(对位置编码比较熟悉的朋友可以直接跳到第3节。)
(1)绝对位置编码
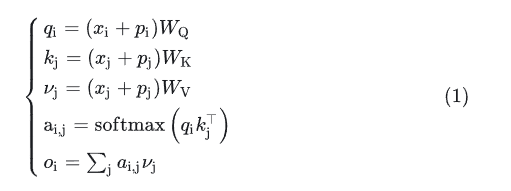
先回顾一下带绝对位置编码的 self-attention。
(2)相对位置编码
直观来说,比如词表大小是 1 万,模型训练窗口最大长度是 512,那么对于模型来说,实际上要区分的输入是 1 万×512=512 万个。
看起来虽然不少,但是在海量的数据和训练量下,这也不算什么事儿,模型确实能 handle。
Google 式
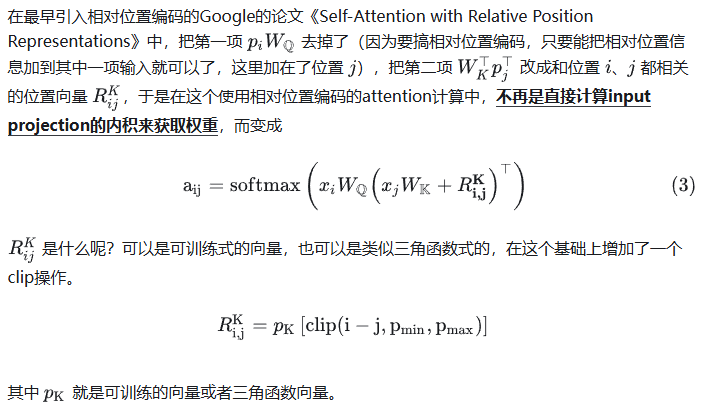
为什么要增加一个 clip 操作?因为直观上,一个词对其左右附近的其他词的位置关系理应更加敏感。
比如“我请你吃饭”中,“吃饭”这个词需要以高分辨率明确区分出前面三个词“我”、“请”、“你”的位置,以免理解成了“你请我吃饭”。
而随着距离越来越远,这种高分辨率的需求也就越来越低,十万个 token 之前的内容顺序对于当前 token 来说,影响比较小了,在位置向量上可以一视同仁。
另外这也是方便了位置信息的外推,比如我们可以只训练 256 个相对位置编码信息,而在应用是可以外推到>256 的长度。
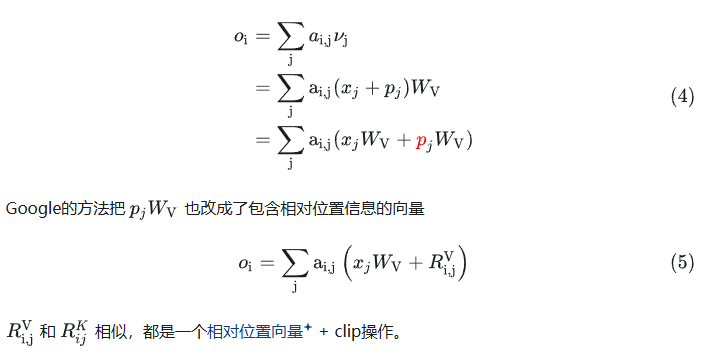
本来到这里就可以了,相对位置信息已经加入了,但是 Google 除了在 input 端增加了相对位置信息,在输出端也增加了相对位置信息。
本来输出端的计算是:
XLNET 式
XLNET 也使用了相对位置编码,思路类似 Google,只是具体的操作不同。
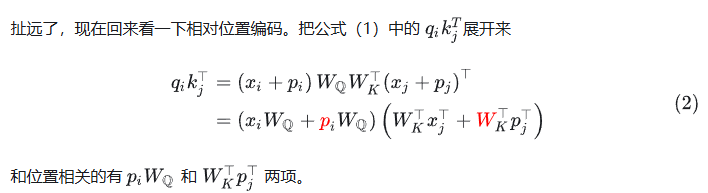
在公式(2)的基础上继续展开:

把绝对位置相关的几个参数改成相对位置相关的参数,变成:
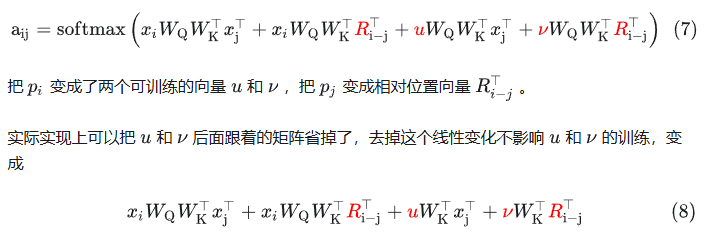
此外,XLNET 只对输入端做了处理,输出端则直接把位置相关的计算去掉了,即:


当然,也有简单一点的实现,比如 T5 的方法。
T5 式
(从最早提出,到 XLNET,以及 DeBerta,T5 等,可以看到相对位置编码的实现有一个简化的趋势,而效果也越来越好,正所谓大道至简,有时候有用的东西未必需要很复杂)
(3)对比
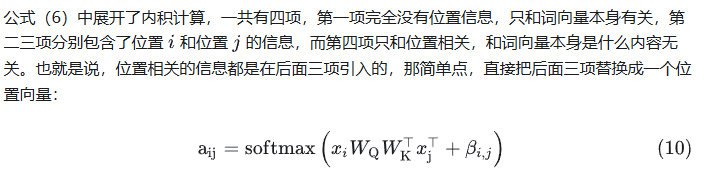
看来相对位置编码确实比较复杂,说个大概需要这么多篇幅;并且相对绝对位置编码,也没有那么直接明了,需要对 attention 计算做一些改造。
公式(1)的绝对位置编码中,可以看到在进 softmax 操作前需要做 3 次矩阵加法,3 次矩阵乘法。
从公式(8)可以看到,共有 4 组矩阵计算要做,每组要做 3 次矩阵乘法,相对会比较复杂。
公式(3)也有类似的情况。当然同时也有一些针对相对位置编码的高效计算被提出,这些就需要针对不同的计算方案来优化了。
总之在实现方式上和计算效率上,绝对位置编码具有一些优势。而在输入输出窗口外推方面,相对位置编码有着天然的优势。
另外,绝对位置编码保持 self-attention 的经典形式,使得应用面更广,如可以使用到 linear attention 方案中去,这个以后再展开讲(又挖了个坑)。
03
RoPE的设计思路
(1)保持 attention 计算形式
回顾完经典的绝对位置编码和相对位置编码,回到 RoPE 上来。
先说设计思路:
首先我们想要保持经典 self-attention 的计算方式,即公式(1)中的形式,输入端 = 内积 + softmax,至于输出端则保持完全不变。softmax 我们不去动,那这里留给我们操作的就是内积。
也就说,现在问题是,我们怎么在只做内积的情况下,把内积结果变成只和相对位置有关,而和绝对位置无关的结果。
写成公式就是:

当然理论上这里是存在无数多组答案的,那么 RoPE 怎么找到一组好实现的组合呢?
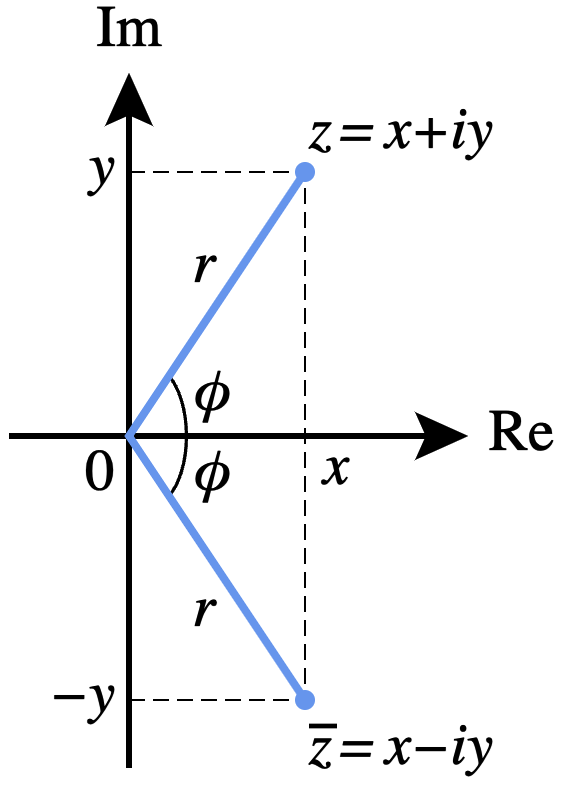
(2)借用复数寻找组合

这里先回顾一下复数的知识。任意复数都可以表示成复平面的一个 2 维向量。
现在考虑 query 和 key 向量都是 2 维的情况,那么可以代入复数的操作。
(先把 hidden size = 2 的情况推理清楚,后续再推广到更高维的情况)
那么在 2 维复数平面上有什么操作可以满足公式(11)的要求呢?Roformer 论文中提出的是这组:
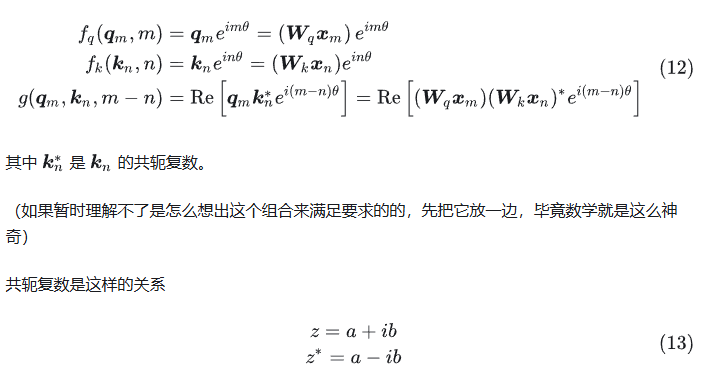
先证明一下这个组合的正确性,是不是真的满足公式(11)。(也可以先跳过证明,选择先相信这个组合)
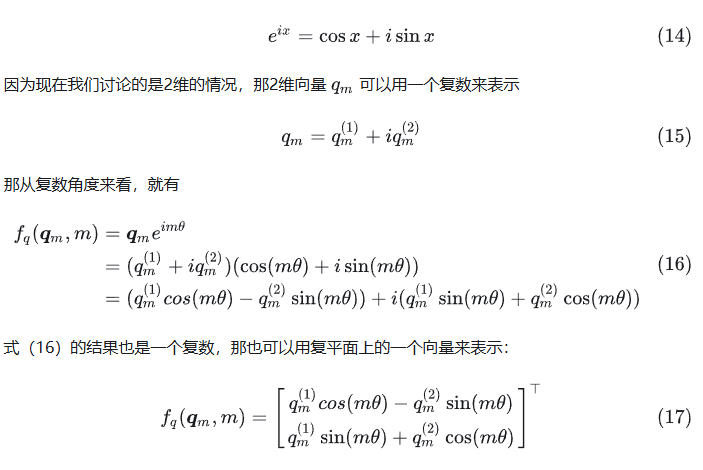
回顾一下欧拉公式:
(这里沿用式(1)中,默认向量为行向量的设定,所有有个 transpose,实际上是行向量还是列向量都没关系,只是推算的时候写法问题)
类似地,有:
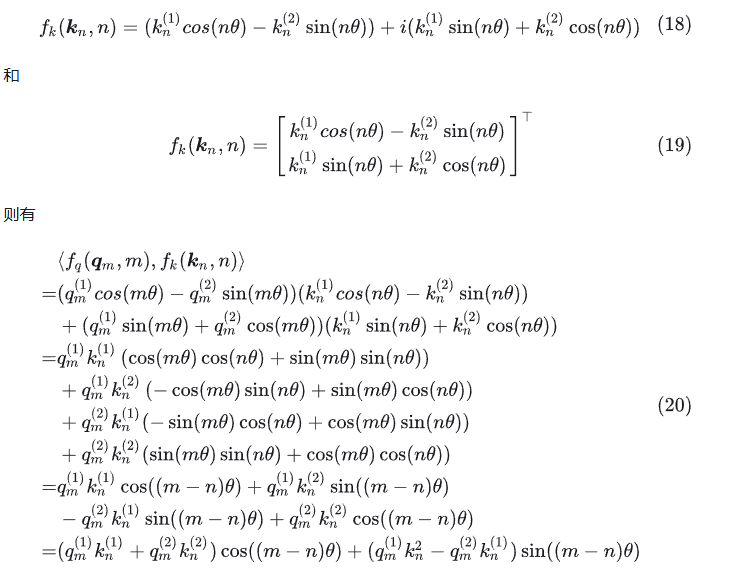
用了三角函数和差公式:
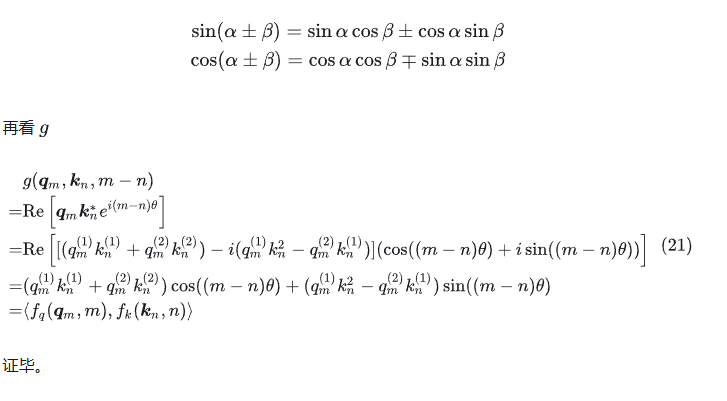
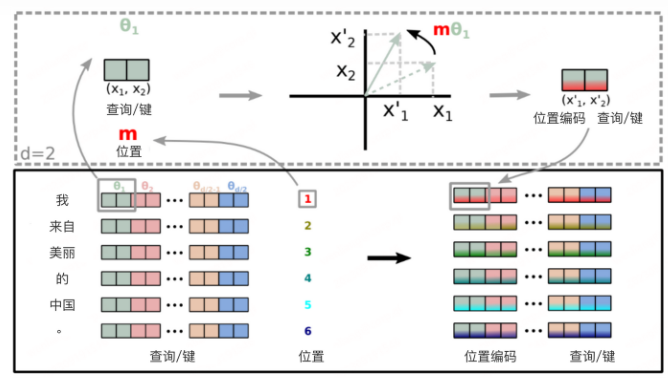
(3)“旋转”位置编码
发现式(17)可以写成这样:
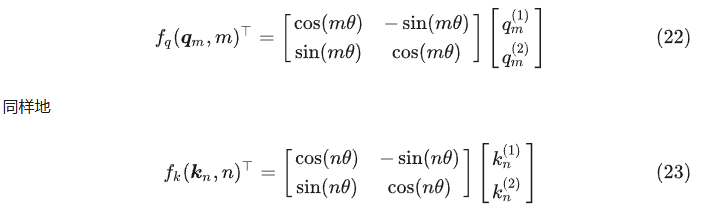
如果从向量视角来看,则有:
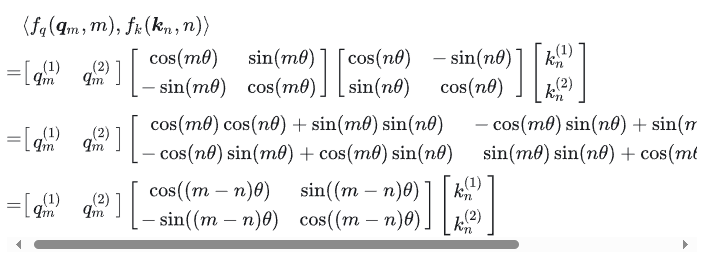
看式(22)和(23),可以看到等号右边都有:
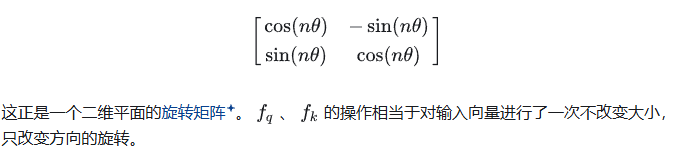
这也是为什么叫做“旋转”位置编码。
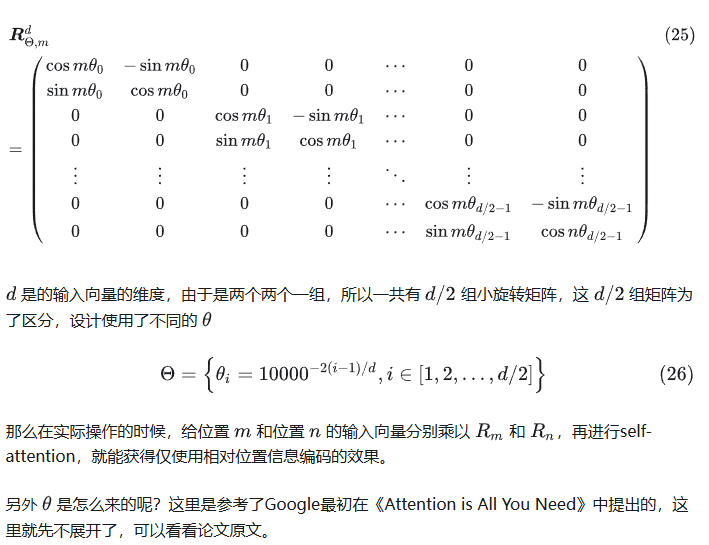
(4)从 2 维推广到高维

答案是把高维输入拆分成两个两个一组(这要求输入是偶数维,目前的模型也都是偶数维,所以没问题),则高维的“旋转”矩阵有多个小旋转矩阵组成。
(5)高效率实现
式(25)中的矩阵在高维的情况下很稀疏,直接使用这么个矩阵来计算效率并不高,可以使用一个这样的高效率实现方式。
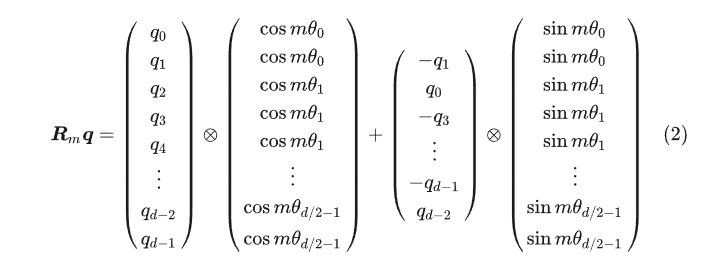
只需进行两组 element-wise 乘法即可。形式上看起来是类似乘性绝对位置编码的做法。
另外,看 LLAMA 中的实现,可以看到旋转位置编码是在每一个 decoder 层的输入都加了的。每次都强化一次位置信息,也有助于模型更好识别不同距离的内容。
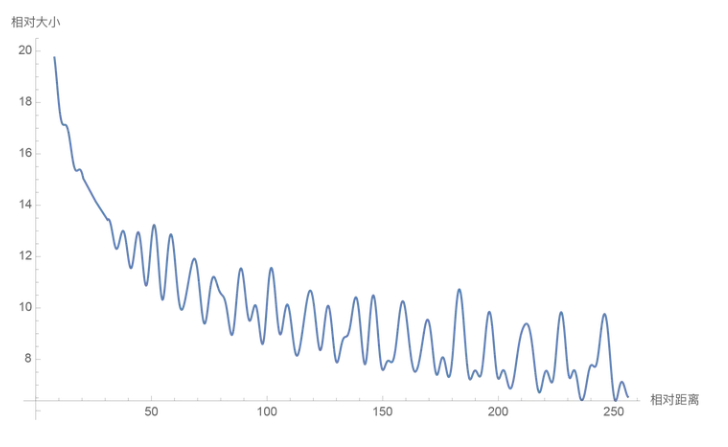
(6)远程衰减的特性
至此,旋转位置编码已经完备,具备了计算高效,实现容易,便于外推,适用于线性注意力的特性。实际上它还具备另一项优点: 有远程衰减的特性 。
直观看起来远程衰减很符合直觉,毕竟注意力机制随着距离的衰减而降低,这个机制和人类也很像。
小结
总之,RoPE 在设计和实现上还是挺巧妙的,性质上也很有很多优势,所以被广泛应用到 transformer 模型中去了。
参考文献:


















 383
383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











