






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
文献来源:
摘要:
这项工作考虑了一种通用的全耦合自主水下航行器(AUV),用于应用非线性次优控制。在大多数情况下,AUV模型是非线性和控制仿射的,尤其是在没有对方向舵和鳍进行建模的情况下。这项工作的目的是解决非线性非仿射AUV在实现控制器方面的挑战,因为控制设计的这一方面在这一研究领域很少受到关注。NPS II是一种众所周知的AUV,在非线性非仿射建模研究中经常被提及。考虑将此模型应用于具有非仿射结构的状态相关里卡蒂方程 (SDRE) 控制器,用于生成次优路径的点对点运动。此外,提供控制、设计和仿真结果时无需对整个系统进行任何简化或解耦。本文的设计方法在NPS II上实现;尽管如此,这种观点可以在使用相同技术的任何AUV上实现。
关键字 SDRE;非仿射控制;非线性;六自由度 ;AUVNPS II
原文摘要:
Abstract
This work considers a general fully coupled autonomous underwater vehicle (AUV) for applying nonlinear suboptimal control. In most cases, AUV models are nonlinear and affine in control, especially without modeling rudders and fins. The aim of this work is to address the challenges of nonlinear non-affine AUVs for implementing the controllers, as this aspect of control design has received little attention in this field of research. The NPS II is a well-known AUV that is often mentioned in research on nonlinear, non-affine modeling. This model is considered for applying the state-dependent Riccati equation (SDRE) controller with a non-affine structure for point-to-point motion that generates a suboptimal path. Furthermore, the control, design and simulation results are provided without any simplification or decoupling of the entire system. The design approach of this paper is implemented on NPS II; nonetheless, this point of view can be actualized on any AUV using the same technique.
- •
表示SDRE的非仿射结构。
- •
介绍了AUV NPS II的SDRE的SDC参数化。
- •
设计了AUV的全耦合六自由度控制器。
- •
仿真调节和轨迹跟踪问题。
如今,AUV一方面在石油,军事,测绘,控制和检查救援等行业中有许多应用。另一方面,此类模型受到硬非线性、不确定性和未知参数的影响;使这些模型对研究人员来说有趣的案例研究的考虑因素。考虑到AUV的复杂行为以及地下车辆六自由度模型控制器设计的限制,已经进行了一些简化,例如线性化和去耦以克服复杂性;虽然,实际测试显示由于这些简化而导致性能降低(Kokegei 等人,2008 年)。此外,它会影响AUV上安装的手臂或其他设备的交互任务的效率(Antonelli,2006)。
Fjellstad和Fossen(1994)提出了一项使用自适应控制方法在六个自由度下AUV的位置和姿态控制的研究。自适应积分控制方法也用于控制ODIN(Antonelli,2007)。其他研究应用滑模控制和反步技术来控制水下航行器(Kokegei等人,2011年,Rezazadegan和Shojaei,2013年)。
本工作通过具有非仿射结构的状态依赖性里卡蒂方程研究了AUV NPS II在位置和姿态控制(六自由度)中的控制问题。选择该模型的原因如下:(I)动力学模型及其流体动力学参数是已知的(Fossen,1994)。(II)在这种情况下,执行器模型使系统非仿射(具有控制非线性)。输入向量由方向舵和鳍的变化以及推进的转速以及每个方向的饱和边界组成。
SDRE用于控制AUV,特别是潜水计划控制(Naik和Singh,2007,Pan和Xin,2012,Yim和Oh,2003,Yan等人,2012,Jantapremjit和Wilson,)。在上述工作中,模型被解耦以实现最优控制,或者它忽略了非仿射项。在早期的研究中,Wernli和Cook(1975)在SDRE领域引入了非仿射结构,并应用泰勒级数展开来证明系统的稳定性。 Çimen和Banks(2004)提出了用于求解非线性非仿射系统的里卡蒂方程的近似序列。使用SDRE为此类系统表达和实施在线控制更新公式(Beeler,2004,Rafee Nekoo,2012,Rafee Nekoo和Geranmehr,2013)。
这项工作的主要贡献是:在非仿射结构中使用SDRE控制器在六自由度中进行AUV控制,而无需简化或去耦。
本文的其余部分介绍如下:AUV 的数学模型在第 2 节中表示;控制器的结构在第 3 节中介绍;SDRE 在模型上的实现在第 4 节中介绍,仿真结果在第 5 节中提供;最后,结论在第6节中表达。
AUV的数学建模
AUV的系统动力学是高度非线性、耦合和时变的。这归因于对许多参数的考虑,例如流体动力阻力、阻尼和升力、科里奥利力和向心力、重力、浮力和推力(Fossen,1994年)。
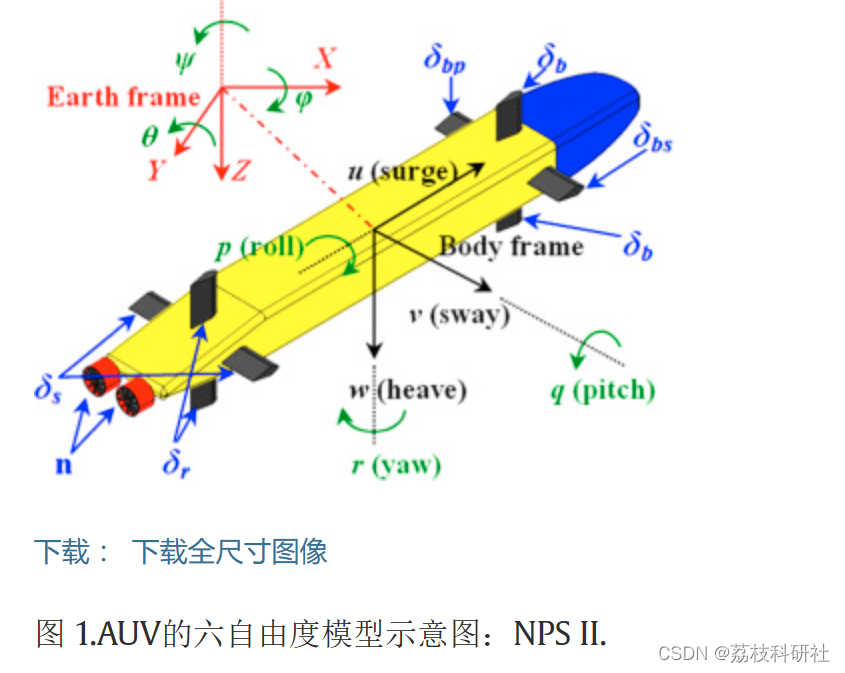
坐标系和运动参数定义
建立了特殊的参考系来描述AUV的运动,并建立了六自由度非线性数学模型。应用于模型的两个参考系是固定参考系(地球或惯性坐标系)和运动参考系(物体固定坐标系),如图1所示。
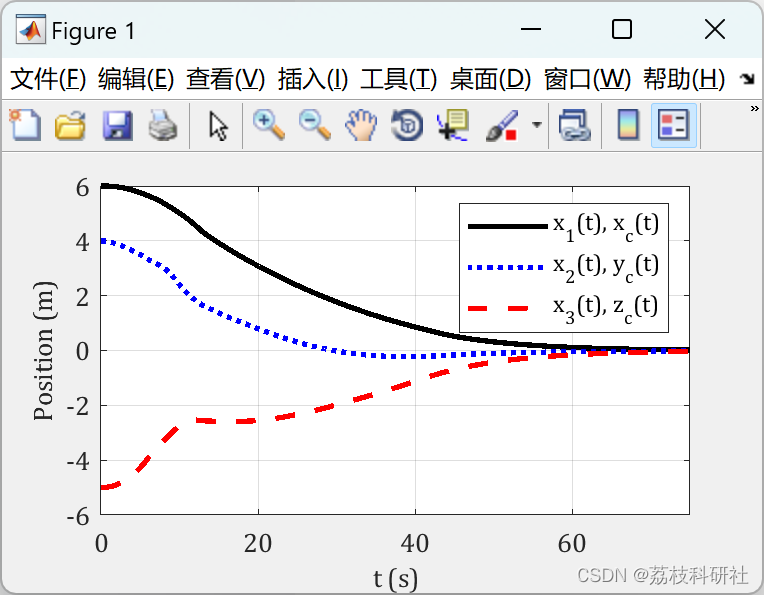
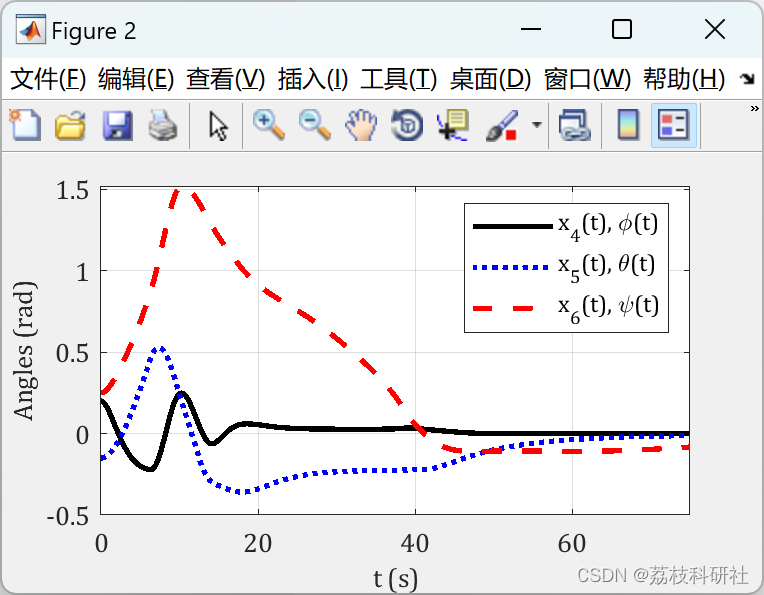
📚2 运行结果
部分代码:
UB=20*pi/180;
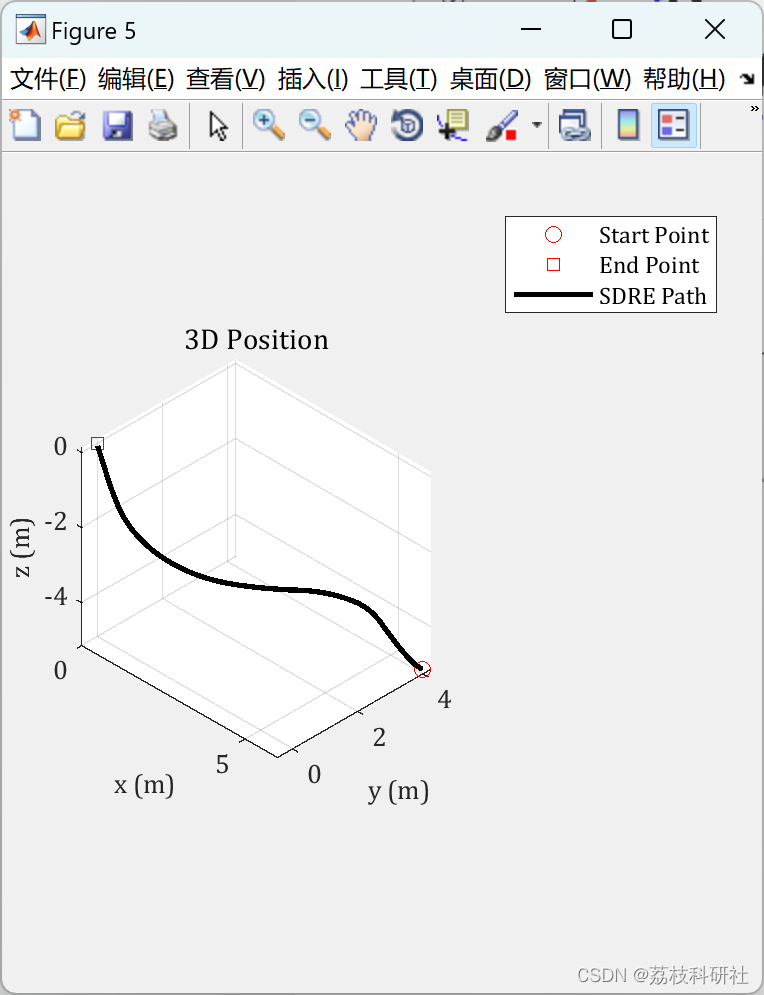
xin1=6; %x
xin2=4; %y
xin3=-5; %z
xin4=0.2; %phi
xin5=-0.15; %theta
xin6=0.25; %psi
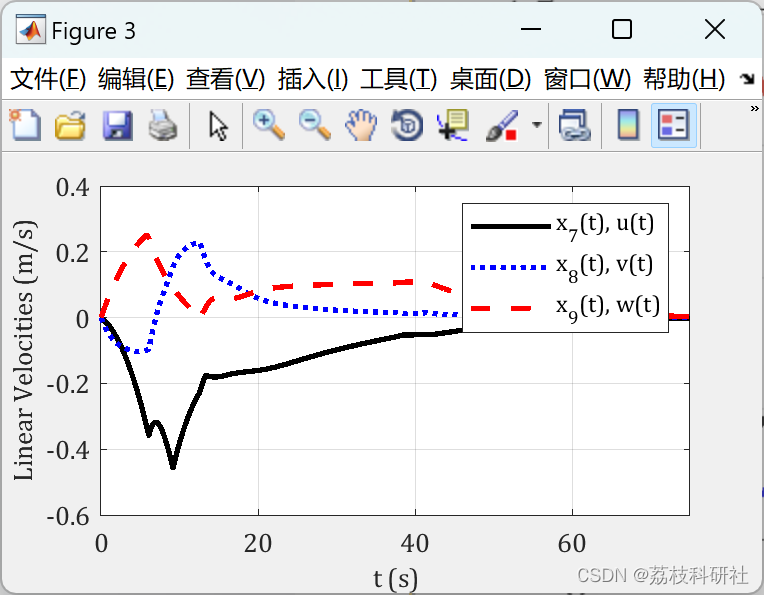
xin7=0; %u
xin8=0; %v
xin9=0; %w
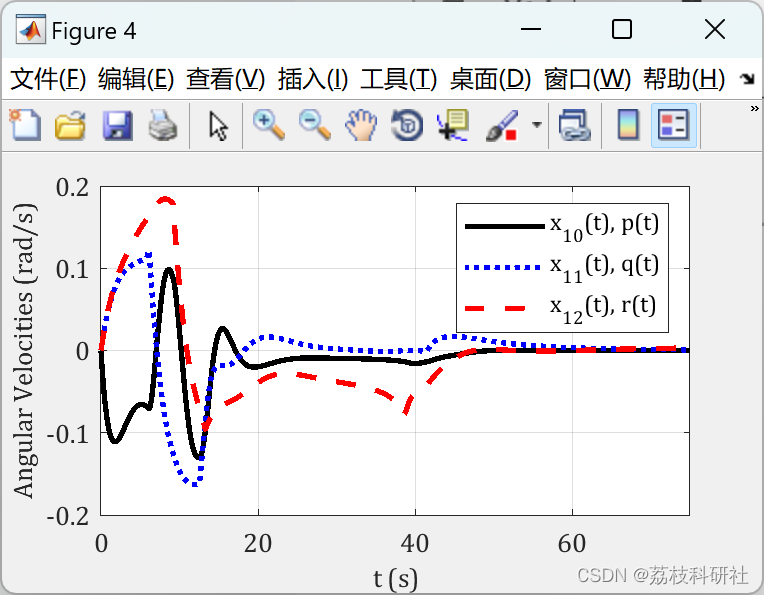
xin10=0; %p
xin11=0; %q
xin12=0; %r
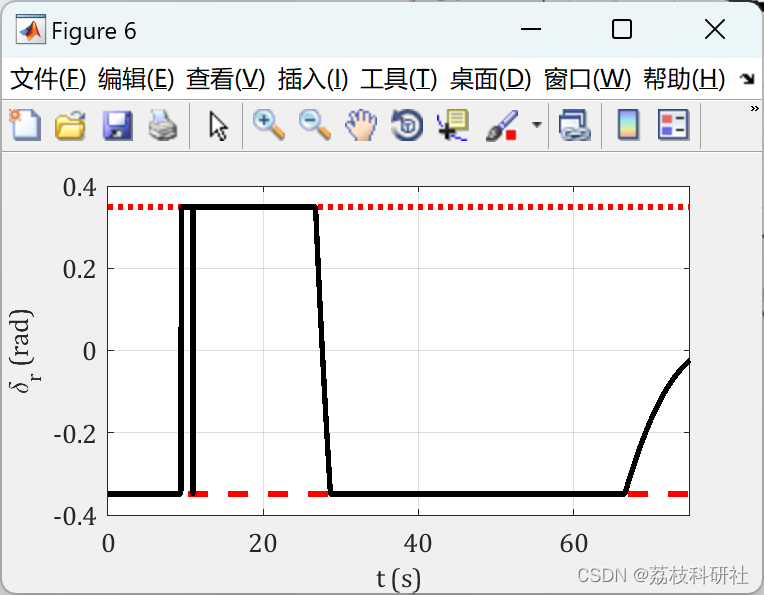
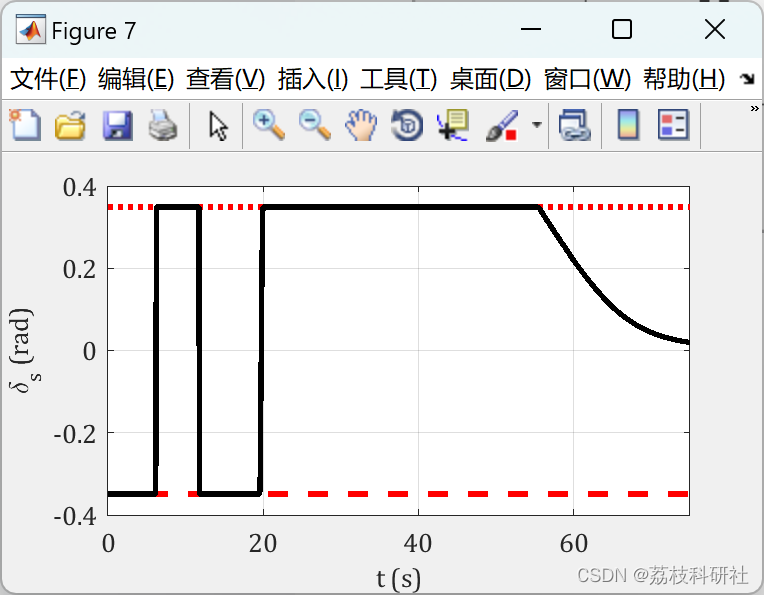
xin13=0; %delta_r
xin14=0; %delta_s
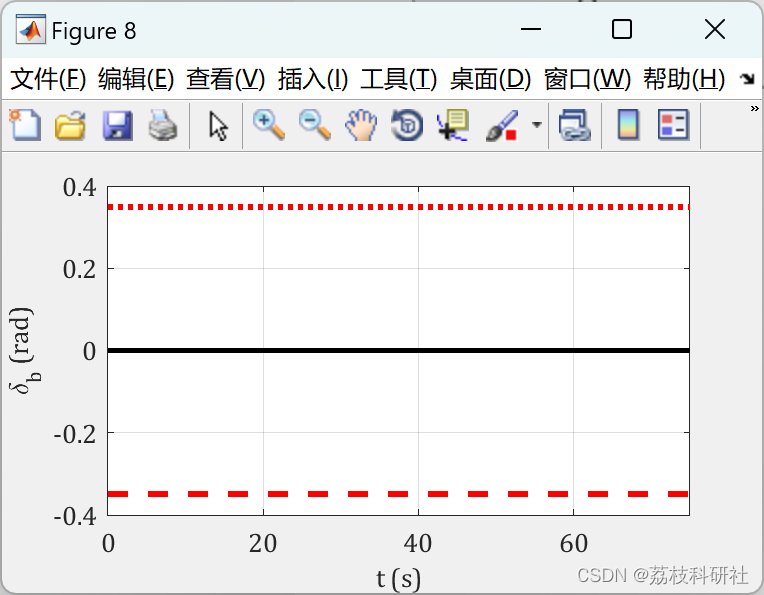
xin15=0; %delta_b
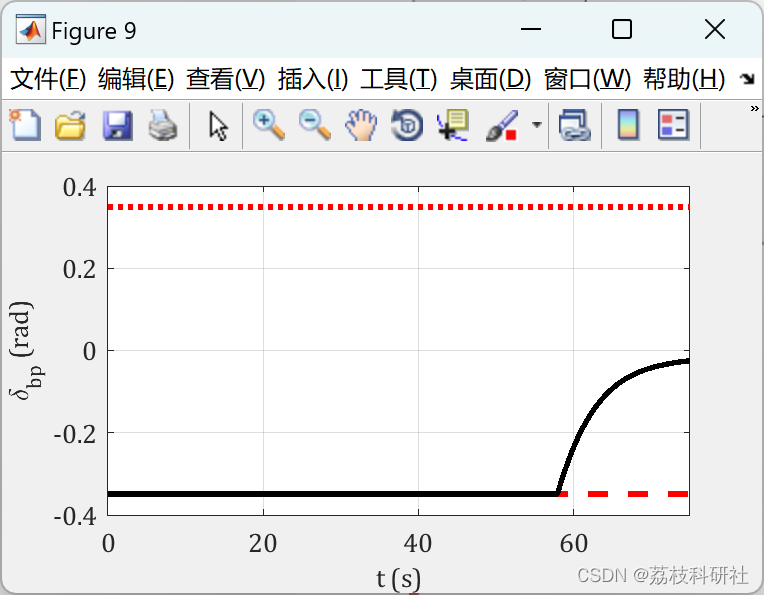
xin16=0; %delta_bp
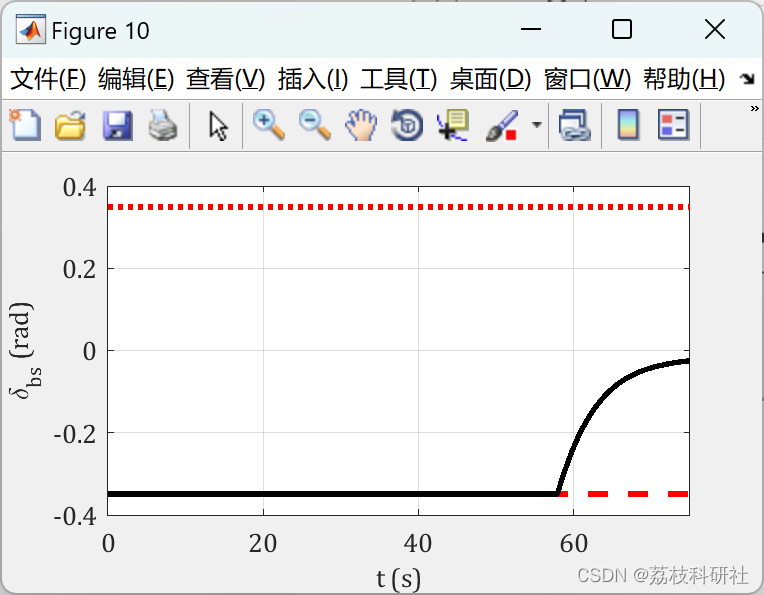
xin17=0; %delta_bs
xin18=100; %n
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Geranmehr, Behdad, and Saeed Rafee Nekoo. "Nonlinear suboptimal control of fully coupled non-affine six-DOF autonomous underwater vehicle using the state-dependent Riccati equation." Ocean Engineering 96 (2015): 248-257.















 678
678











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









