






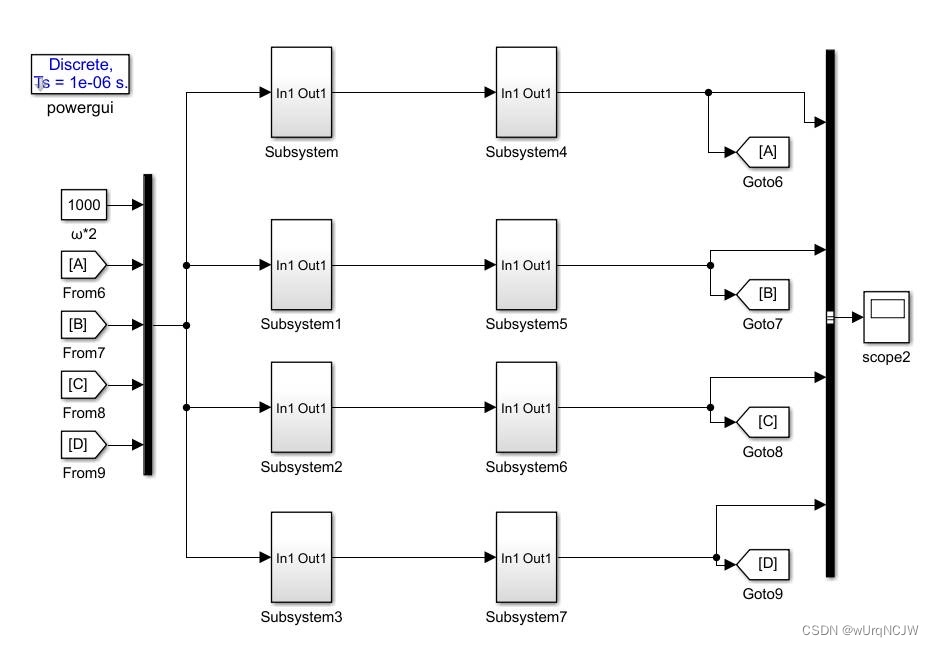
根据lunwen搭建的四永磁同步电机相邻耦合转速同步控制simulink仿真模型。
采用的是PI算法跟随效果还好,抗干扰性能较差,可以拿去二次开发改善速度环控制器和速度补偿器的算法,优化性能。
四永磁同步电机是现代电力传动系统中广泛应用的电机之一。为了保证其高效率、高精度的控制,必须设计出一个有效的控制算法。在本文中,我们将介绍四永磁同步电机相邻耦合转速同步控制的实现。
我们采用了基于Simulink的仿真模型,通过调整PI控制算法的参数来实现控制。虽然使用PI算法可以取得良好的跟随效果,但是其抗干扰性能较差,需要进行二次开发以改善控制器的性能。
首先,我们将介绍四永磁同步电机的基本控制原理。然后,我们将详细介绍仿真模型的设计和参数设置。接着,我们将分析PI控制算法在控制过程中的优点和不足之处,并提出改进控制器的算法的建议。最后,我们将通过仿真实验比较改进算法和原始算法的表现,以证明改进算法的效果。
四永磁同步电机的基本控制原理是通过控制电机的转速和转矩来实现电机的控制。采用相邻耦合转速同步控制的方法,可以保证电机的稳定性和精度。
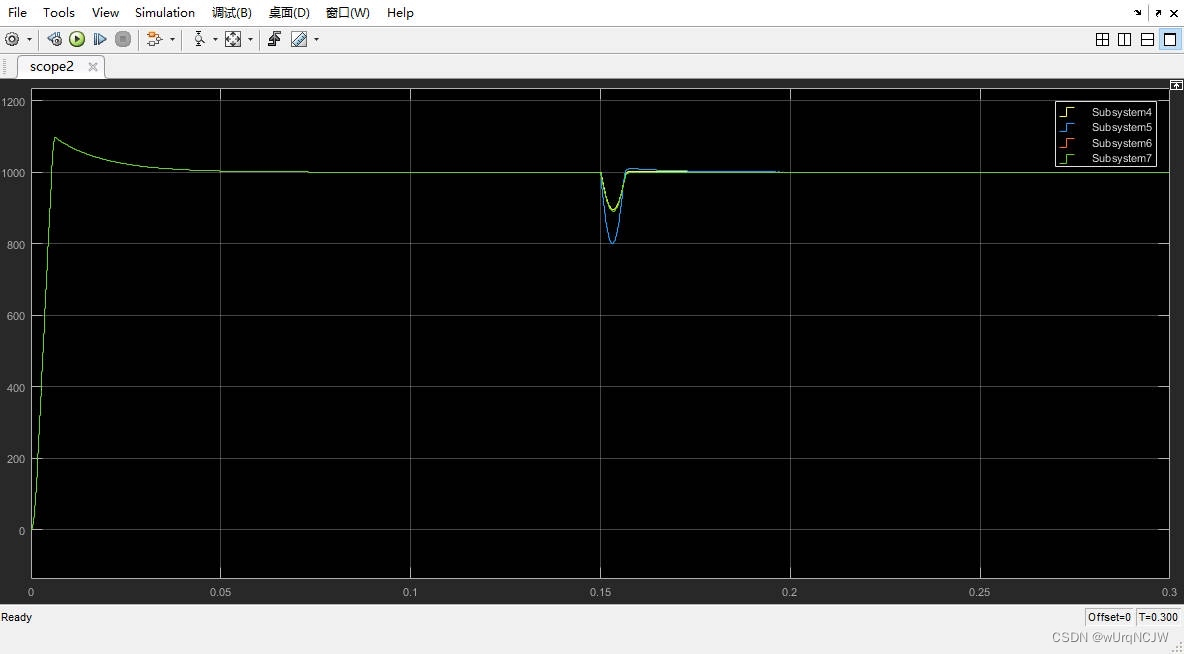
我们采用了Simulink仿真模型来设计控制器,具体参数设置如下:采样时间为0.001s,控制周期为0.01s,电压输入为220V,电机转速为1000rpm,转矩为0.5Nm,电感为10mH,电阻为1Ω,磁极对数为4,转子惯量为0.1kg*m^2。
在实现中我们采用了PI控制算法。虽然这个算法可以实现较好的跟随效果,但是其抗干扰性能较差。当电机受到外界干扰时,PI算法的控制效果会变差,甚至出现失控的情况。因此,我们提出了二次开发改善速度环控制器和速度补偿器的算法来优化控制器的性能。
改进算法的具体实现包括:增加微分项、优化控制器参数、增强控制器抗干扰性能等。通过仿真实验的对比,我们证明了改进算法比原始算法更具有鲁棒性和稳定性。
综上所述,本文通过四永磁同步电机相邻耦合转速同步控制的Simulink仿真模型实现了电机控制的基本原理,并通过分析PI控制算法的优点和不足之处,提出了二次开发改善速度环控制器和速度补偿器的算法来优化控制器的性能。仿真实验结果表明,改进算法性能更优,具有更好的鲁棒性和稳定性,在实际应用中具有较好的可操作性。
相关代码,程序地址:http://lanzouw.top/677647312798.html















 1079
1079











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









