







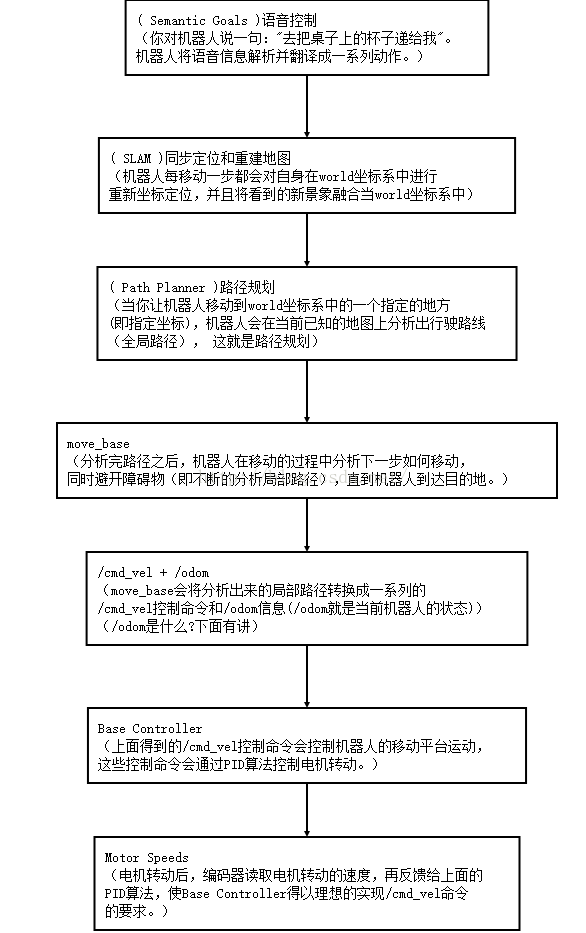
控制一个移动的机器人,可能在不同的层次面进行。
ROS 的控制阶层看起来就是这个样子的: (从最上层开始)
节选自http://blog.csdn.net/github_35160620/article/details/52514090
控制一个移动的机器人,可能在不同的层次面进行。
ROS 的控制阶层看起来就是这个样子的: (从最上层开始)
节选自http://blog.csdn.net/github_35160620/article/details/52514090
 3925
1315
986
3925
1315
986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























